 降低運動控制應用中可聞噪聲的方法
降低運動控制應用中可聞噪聲的方法
隨著家庭和辦公室開放式布局設計的出現以及日漸轉向混合動力電動汽車和電動汽車,愈發需要更安靜、高效的電機控制。即使是非常小的聲學差異,也會對可聞噪聲造成顯著影響。
利用具有更高功率密度、更高集成度和更高效系統的電機控制電路等先進的實時控制技術,可幫助您實現更出色的系統聲學性能。一些其他策略包括使用連續脈寬調制(PWM) 的矢量磁場定向控制 (FOC) 算法,減少振動的特定控制算法,以及應用死區時間補償和 PWM 生成來降低可聞噪聲的集成控制。
由于這些不同的產品和策略都可以降低運動控制應用中的可聞噪聲,因此可能很難確定哪種策略更適合您的應用。在本文中,我將以 BLDC集成控制柵極驅動器為例,列出降低運動控制應用中可聞噪聲的三種出色方式。
PWM
用于降低電機控制應用中可聞噪聲的第一種策略是連續 PWM。PWM
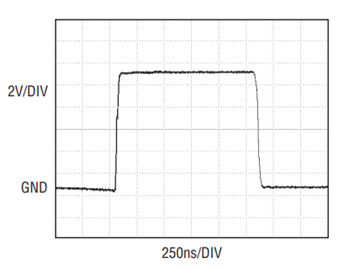
是一種技術,通過導通和關斷晶體管來產生輸出波形,從而讓電機電壓在給定時間處于高電壓或低電壓狀態。然后,電機中的電感對這些波形進行濾波,以便基本上平均輸出波形。調整占空比(波形導通時間與關斷時間之比)將改變平均電壓。圖2 展示了使用 PWM 生成正弦波的一個示例。

圖 2:使用 PWM 生成正弦波的示例
例如,德州儀器 (TI) MCF8315A BLDC 集成控制柵極驅動器是一款無傳感器 FOC 電機驅動器,可實現連續和非連續空間矢量 PWM
方案。連續調制有助于減小低電感電機的電流紋波,但由于所有三個相位互相交錯,因此會導致更高的開關損耗。非連續調制的開關損耗更低(因為一次只有兩個相位互相交錯),但電流波紋更高。在圖3 和圖 4 中,您可以看到連續和非連續 PWM 的差異。

圖 3:相電流波形與快速傅里葉變換 (FFT) 非連續 PWM 之間的關系

圖 4:相電流波形與 FFT 連續 PWM 之間的關系
死區時間補償
用于降低電機控制應用中可聞噪聲的第二種策略是死區時間補償。在電機控制應用中,在半橋中高側和低側金屬氧化物半導體場效應晶體管的開關之間插入死區時間可避免發生擊穿。插入死區時間后,相節點上的預期電壓與施加的電壓會有所不同,相節點電壓會在相電流中引入不必要的失真,進而導致可聞噪聲。
要管理這種額外的噪聲,工程師可以利用諧振控制器集成死區時間補償,以便控制相電流中的諧波分量,從而緩解因死區時間導致的電流失真,如圖 5 所示。

圖 5:無傳感器 FOC 死區時間補償分析
例如,TI 的 MCF8316A BLDC 集成控制柵極驅動器(一款無傳感器 FOC 電機驅動器)采用此內置功能來優化多種電機頻率下的聲學性能,如圖6 所示。

圖 6:實施 PWM 調制和死區時間補償來優化 MCF8316A 聲學性能
可變換向模式
用于降低電機控制應用中可聞噪聲的最后一種策略是可變換向模式。在梯形換向中,有兩種主要配置:120 度和 150 度。120度梯形換向可能會導致更多的聲學噪聲,因為較長的高阻抗周期會導致扭矩波紋增大,如圖 7 和 8 所示。150度梯形換向只能在低速下運行,因為檢測過零的窗口期很短。
為了應對這些挑戰并提高聲學性能,工程師可以構建能夠在 120 度梯形換向和 150 度梯形換向之間動態切換的電機驅動器系統。這種動態調制可以改善
BLDC 電機控制期間的整體聲學性能。
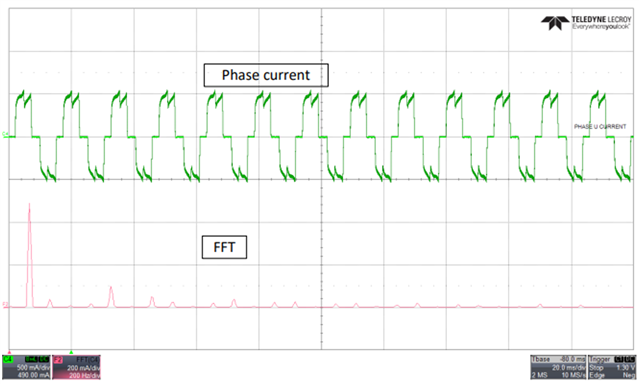
圖 7:相電流和 FFT - 120 度換向

圖 8:相電流和 FFT - 150 度換向
例如,TI 無傳感器 BLDC 集成梯形控制柵極驅動器(如 MCT8329 和 MCT8316)采用此內置功能來優化多種電機頻率下的聲學性能,如圖 9
所示。

圖 9:實施具有動態調制的可變換向模式來優化 MCT8316A 聲學性能
結語
TI在加大運動控制技術的投資,助力構建更高效的聲學敏感型系統,其構建塊旨在滿足聲學要求。當您設計系統時,請記得采用這三種出色方式來降低電機控制應用中的可聞噪聲。
-
噪聲
+關注
關注
13文章
1120瀏覽量
47400 -
BLDC
+關注
關注
206文章
800瀏覽量
96868 -
柵極驅動器
+關注
關注
8文章
740瀏覽量
38974
發布評論請先 登錄
相關推薦
如何在 AC/DC 設計中降低待機時的可聞噪聲和功耗
如何減少直流開關電源產生的可聞噪聲

LT3751 DC/DC轉換器可大大降低可聞變壓器噪聲

通用反激式控制器大大降低可聞變壓器噪聲
降低運動控制應用中可聞噪聲的三種出色方式
降低運動控制應用中可聞噪聲的三種出色方式

降低運動控制應用中可聞噪聲的三種方式

幾種有效降低電源紋波噪聲的方法






 工商網監
工商網監
評論