

以某車型為例,該項目已對CAN-FD網絡進行了量產化應用,該項目基于電子電氣功能架構搭建了集合多種車載網絡協議的網絡架構,集信息域、互聯域、自動駕駛域、底盤動力域的多域融合的一汽新一代整車網絡架構,該架構具備支持拓展L2+級自動駕駛和整車級 OTA 技術的能力,具有高功能安全、高信息安全的技術優勢。
2.1 功能定義
本車型CAN-FD部分主要實現ADAS自動駕駛和動力車控等功能,ADAS功能分為駕駛智能輔助功能和自動駕駛功能,包括撥桿換道、自動換道、自適應巡航、高速代駕、擁堵跟車、自動泊車等基本或高階的功能,涉及到 ADAS域控制器與感知傳感器、底盤、動力等執行控制器的控制交互。
2.2 方案設計
對于 2.1 章節所描述的功能需求,在以往項目設計時多采用 CAN 總線進行傳輸相關報文,但隨著ADAS 功能水平升級,這些 ADAS功能的實現對網絡通信有著更高性能、低時延、高帶寬及ASIL B+的功能安全要求,傳統CAN通信已無法滿足。一汽紅旗在本車型上首次應用 CAN-FD 搭建ADAS 等域的網絡架構,實現 ADAS 域控制器與感知控制器及執行控制器之間的高實時性和穩定性的通信傳輸。
在本車型網絡架構設計中,將 ADAS 功能相關的報文分為2類,控制類和感知類。再根據每個單元功能的功能安全ASIL等級確定每條報文和信號的ASIL等級,進而制定每條信號的E2E校驗策略。由于舒適娛樂采用傳統CAN的網絡骨架,所以在中央網關中做了CAN 轉 CAN-FD(CAN-FD 轉 CAN)的功能設計,并對網關做了功能安全冗余設計,網關功能安全設計內容在此不做贅述。
2.3 設計實現
2.3.1 車型CAN-FD節點拓撲結構設計
在本車型項目中,CAN-FD 節點主要有網關控制器、ADAS 域控制器、ADAS 感知控制器、動力域控制器、底盤域控制器(圖 5)。
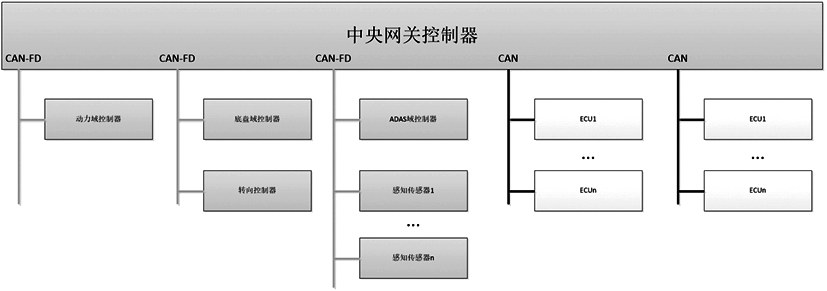
圖5 車型CAN-FD節點拓撲
其中網關主要實現 PDUCAN-FD 路由功能、CAN-CANFD 路由功能;ADAS 域控制器實現 ADAS 規劃決策功能;ADAS
感知控制器實現環境感知和定位功能;動力域控制器實現動力分配和控制功能;底盤域控制器實現制動和轉向功能。
2.3.2 路由策略設計
從 CAN 到 CAN-FD 的路由,考慮到傳輸效率,網關將接收到的多個 CAN 報文打包到一個 CAN-FD
報文中進行發送,為保證報文矩陣的可擴展性和打包解析的便利性,CAN-FD中每8個bytes與傳統CAN報文相對應,每連續的8 bytes中至少預留32bits用于未來功能的擴展。
網關的報文路由形式分為CAN-CAN路由,CANCANFD 路由和 CANFD-CAN 路由 3 種,CAN-CAN 路由遵循傳統 CAN
路由原則,在此不做贅述,后文主要對后2種路由形式進行詳細說明。
CAN-CANFD路由:網關可以將多條報文進行組包后轉發,也可以不組包單報文轉發;單報文轉發僅改變源網段報文的ID和報文類型(幀結構和傳輸速率),但不改變數據場里信號的位置和數據場長度(DLC),這種轉發形式稱為報文路由。直接路由可以通過底層軟件自己完成,不需要上層軟件的參與,路由時間延遲低,一般可控制器在2ms以內。
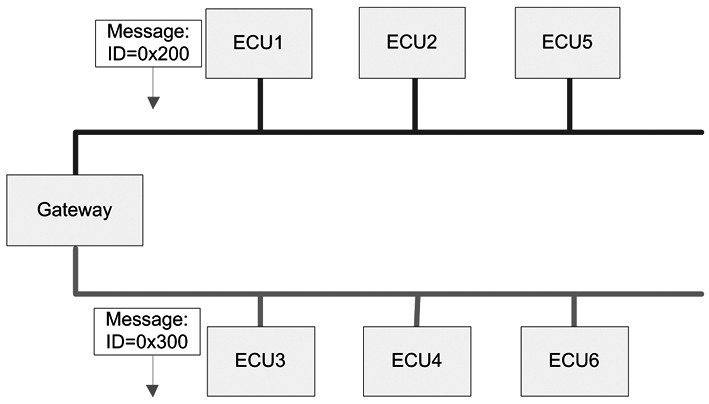
圖7 報文路由過程示例
CANFD-CAN路由:CAN-FD到CAN總線的消息轉發需要將DLC長達64 bytes的CAN-FD的消息幀拆分為多個DLC最長為8
bytes的CAN消息幀,需要數據場中的信號拆分重組,改變報文的ID、報文類型、DLC長度以及信號位置,這種路由方式稱為信號路由。信號路由過程需要上層軟件的參與,路由時延相比報文路由要高一些,想實現功能安全,網關也需要做更多的安全冗余設計工作。
2.4 CAN-FD通信性能驗證
針對本項目設計,搭建了臺架對 CAN-FD相關節點進行了一致性測試和硬件在環(Hardware In the
Loop,HIL)驗證,在網絡的關鍵性能指標如總線負載率、吞吐量、平均時延和峰值時延、網絡利用率和網絡效率都得出了不錯的結果數據。
-
汽車電子
+關注
關注
3036文章
8266瀏覽量
169670 -
CAN
+關注
關注
57文章
2895瀏覽量
466910 -
協議
+關注
關注
2文章
614瀏覽量
39880
發布評論請先 登錄
如何從傳統的CAN用法中設置CAN-FD?
CAN-FD協議你了解多少
一文淺析汽車CAN-FD總線的通信應用
多核異構-雙核高速率CAN-FD評測
是否有任何外部組件可以使ESP32S3與CAN-FD兼容?
你知道CAN-FD協議有多少?
DS70000系列數字示波器在CAN-FD協議解碼上的應用
STM32設備上的CAN FD
簡單介紹基于CAN-FD的診斷通信傳輸層
CAN與CAN-FD主要區別概述
車載CAN-FD的抗擾度評估技術
如何使用DSLogic分析CAN/CAN-FD 信號?






 工商網監
工商網監

評論