") IoT畢設 | 機智云物聯(lián)網(wǎng)云平臺+STM32+樹莓派的草莓采摘機器人控制系統(tǒng)
IoT畢設 | 機智云物聯(lián)網(wǎng)云平臺+STM32+樹莓派的草莓采摘機器人控制系統(tǒng)
本文介紹的草莓采摘機器人控制系統(tǒng)是由江西理工大學機械工程專業(yè)的程鵬勝設計開發(fā)完成。針對某草莓種植基地模塊化種植的高架草莓人工采摘耗時長成本大的問題,提出了一種全向移動的草莓采摘機器人系統(tǒng)方案。系統(tǒng)的硬件電路主要包括以STM32F407ZGT6為核心的主控制器、電源電路、WIFI模塊、激光測距單元、電機驅(qū)動模塊。系統(tǒng)的軟件設計主要包括RT-thread實時操作系統(tǒng)在單片機上的移植調(diào)試、樹莓派3B+視覺識別、樹莓派與單片機數(shù)據(jù)傳輸?shù)耐ㄓ嵳{(diào)試、機智云物聯(lián)網(wǎng)和WIFI模塊在單片機上的接入以及樹莓派上位機控制軟件的實現(xiàn)。通過利用深度學習算法實現(xiàn)草莓的識別與定位,將采摘信息以及采摘機器人的狀態(tài)使用物聯(lián)網(wǎng)技術(shù)傳輸?shù)皆贫耍瑢崿F(xiàn)草莓采摘機器人的自主采摘和云端監(jiān)測,最終完成一整套穩(wěn)定控制的草莓采摘系統(tǒng)。
01
系統(tǒng)整體方案設計
本系統(tǒng)設計對于高架草莓的采摘搭建了移動式草莓采摘機器人樣機,整個系統(tǒng)由全向移動底盤、機械臂、視覺系統(tǒng)、運動控制器組成。系統(tǒng)設計圖如圖1.1所示。
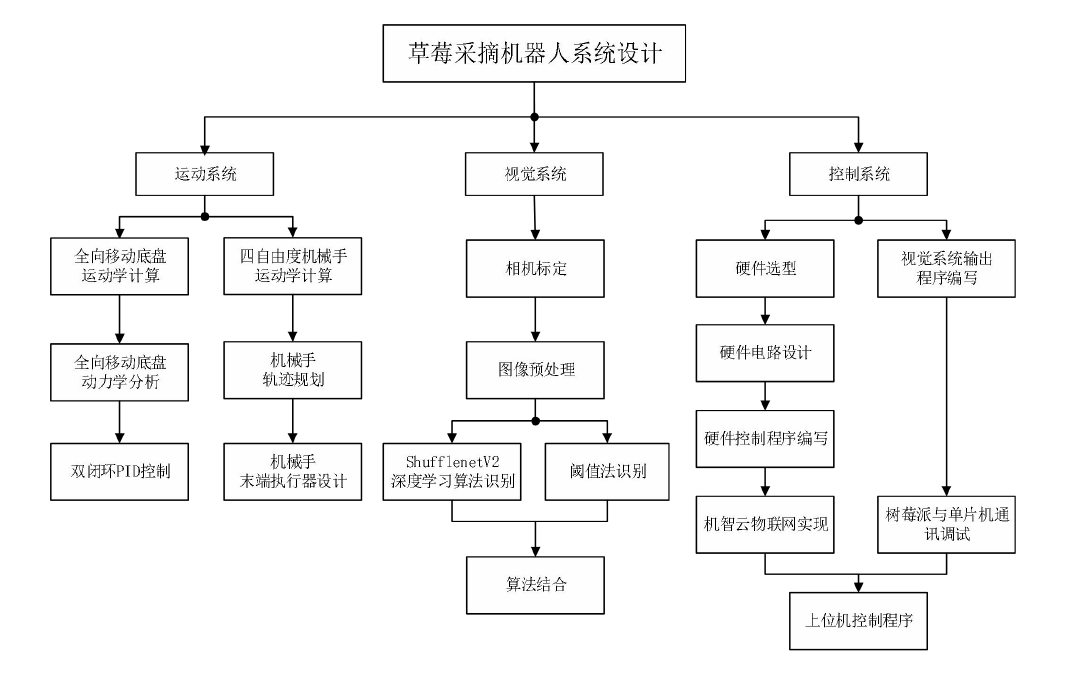 圖1.1系統(tǒng)設計圖系統(tǒng)框架如圖1.2所示,采摘機器人結(jié)構(gòu)簡圖如圖1.3所示。主要研究了采摘機器人的全向移動底盤、機械手及其控制、視覺識別系統(tǒng)和整機的控制系統(tǒng)。
圖1.1系統(tǒng)設計圖系統(tǒng)框架如圖1.2所示,采摘機器人結(jié)構(gòu)簡圖如圖1.3所示。主要研究了采摘機器人的全向移動底盤、機械手及其控制、視覺識別系統(tǒng)和整機的控制系統(tǒng)。
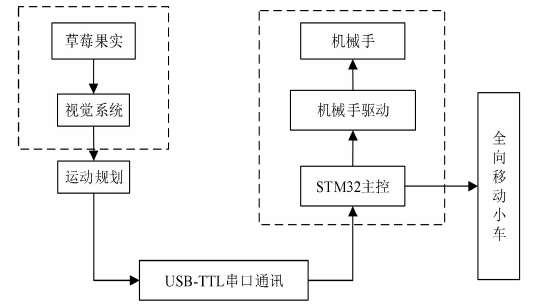 圖1.2 草莓采摘機器人系統(tǒng)框圖
圖1.2 草莓采摘機器人系統(tǒng)框圖
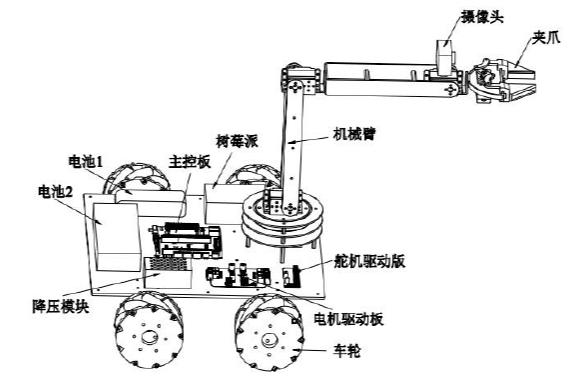 圖1.3 整機采摘機器人結(jié)構(gòu)圖
圖1.3 整機采摘機器人結(jié)構(gòu)圖
根據(jù)某草莓種植基地采用一行式的種植方式,模擬搭建草莓架如圖1.4所示。前期調(diào)試采用仿真草莓,后期整機調(diào)試采用真實的草莓果實采摘作業(yè)中僅對獨立生長的草莓進行采摘 并未對相互接觸的草莓進行分離采摘。整機采摘機器人的動作流程如圖1.4所示。根據(jù)種植基地的種植特點草莓種植行列規(guī)范,實驗樣機僅對單列種植進行實驗,對于多行的采摘在后續(xù)的工業(yè)樣機中根據(jù)導航方式實現(xiàn)。
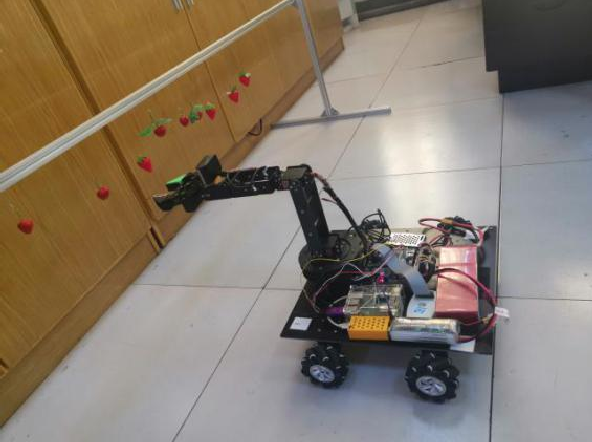 圖1.4 草莓架與采摘機器人
圖1.4 草莓架與采摘機器人
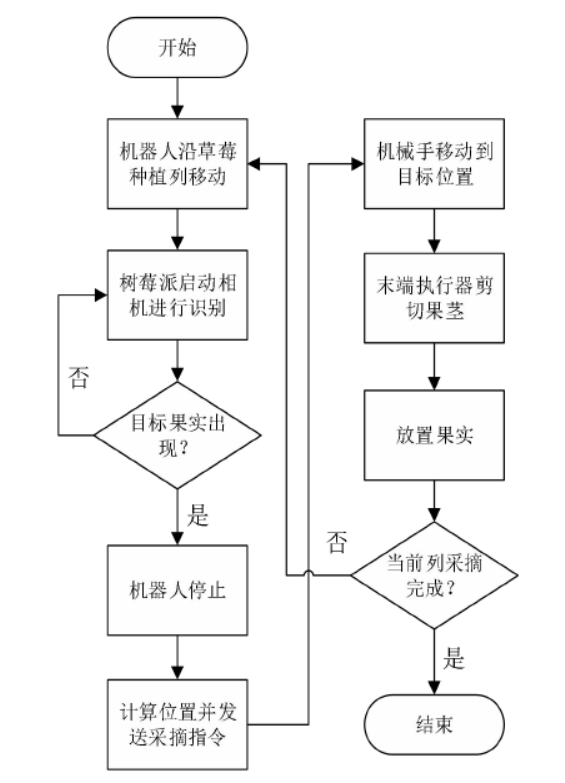 圖1.5 整機采摘機器人的動作流程
圖1.5 整機采摘機器人的動作流程02
控制系統(tǒng)設計
(一)硬件部分介紹草莓采摘機器人設計的硬件控制系統(tǒng)框圖如圖2.1所示,包括核心控制單元、傳感器、驅(qū)動器等。核心控制單元包括單片機和樹莓派,樹莓派負責視覺數(shù)據(jù)的處理和指令下發(fā),單片機接收并執(zhí)行指令,此外,還處理一些簡單的傳感器數(shù)據(jù)。傳感器包括激光測距、陀螺儀、編碼器、薄膜壓力傳感器。驅(qū)動器包括電機驅(qū)動和機械手的舵機驅(qū)動,物聯(lián)網(wǎng)單元中的WIFI模塊負責將采摘數(shù)據(jù)以及機器人的狀態(tài)上傳到云端。
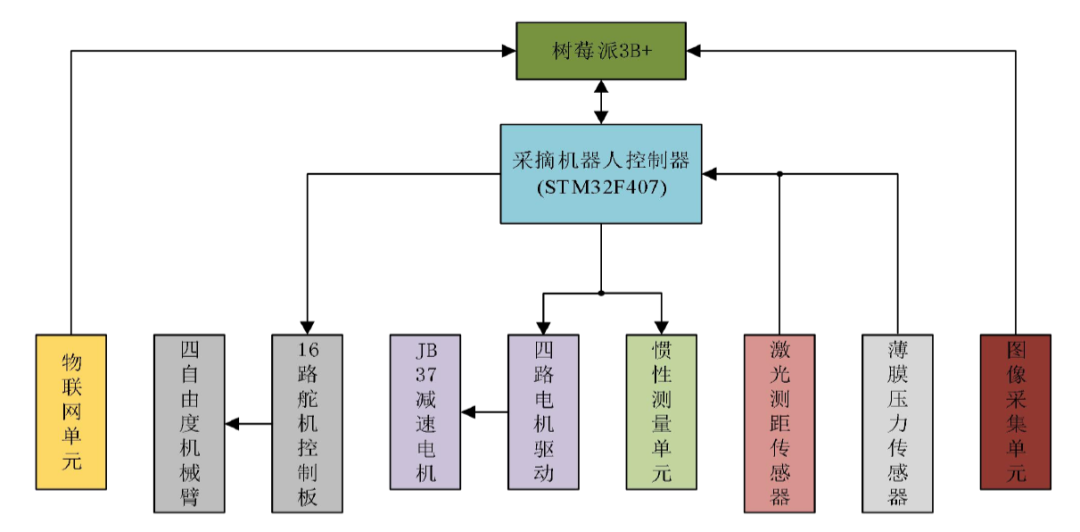 圖2.1 硬件平臺系統(tǒng)框圖
圖2.1 硬件平臺系統(tǒng)框圖
◆ 主控芯片
根據(jù)移動機器人的硬件要求選擇控制器的主控芯片。鑒于實驗平臺能耗以及控制器的數(shù)據(jù)處理能力等問題,選用STM32F407ZGT6芯片作為控制器芯片。并且采用樹莓派3B+,用來運行圖像處理程序,以及將計算結(jié)果進行機械臂的逆解計算后發(fā)送給單片機。樹莓派3B+實物圖如圖2.2所示。
 圖2.2 樹莓派3B+實物圖
圖2.2 樹莓派3B+實物圖
◆無線模塊
為方便查看采摘機器人的工作狀態(tài)以及采摘數(shù)量,本文采用無線網(wǎng)連接的方式進行實現(xiàn),選用ATK-ESP8266模塊作為機器人數(shù)據(jù)收發(fā)的節(jié)點。ATK-ESP8266模塊支持TTL串口通信,同時兼容3.3V和5V的電壓,對于不同電壓要求的單片機連接方便。模塊實物如圖2.3所示,各引腳的功能如表1所示。使用該模塊首先將IO_0拉低進入固件燒寫模式,燒錄完成后能通過手機或電腦搜索到該模塊的信號,最后把模塊的發(fā)送引腳和接收引腳與單片機的發(fā)送和接收交叉連接即可通訊。
 圖2.3 ATK-ESP8266模塊實物圖
圖2.3 ATK-ESP8266模塊實物圖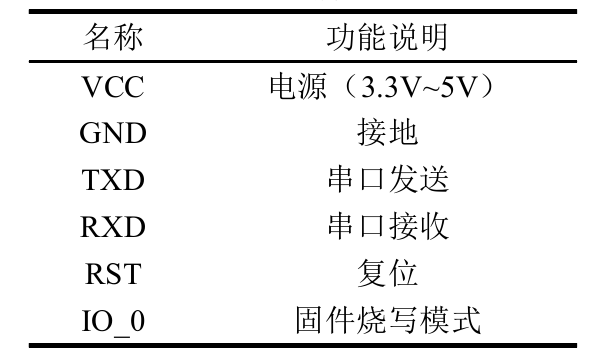 表1 ATK-ESP8266模塊引腳功能
表1 ATK-ESP8266模塊引腳功能
◆硬件模塊設計
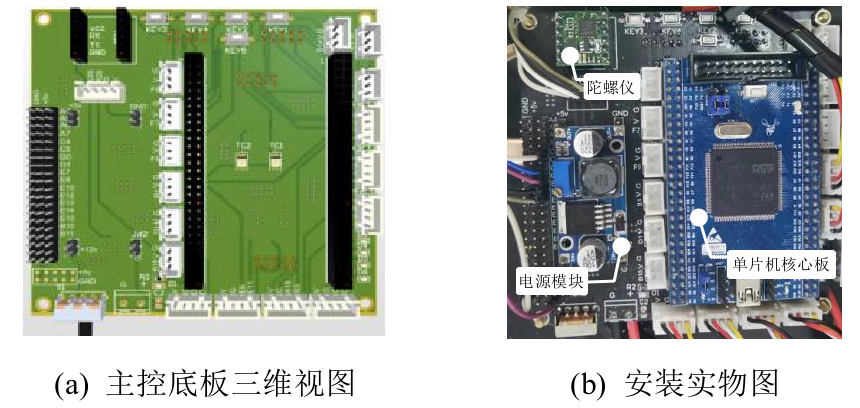
使用STM32F407ZGT6芯片作為控制器的核心芯片,設計了一個完全匹配本文實驗平臺的PCB底板,PCB底板和核心板的連接引腳圖以及底板三維圖如圖2.4所示。底板上設置了多個傳感器的接口如編碼器、串口、陀螺儀和舵機控制板的I2C總線接口,以及用來外接引腳的排針排母。編碼器接口使用了XH2.54的標準接口使實驗平臺的整體布局更加美觀。
(二)軟件部分介紹
本控制系統(tǒng)軟件設計部分由硬件控制和數(shù)據(jù)處理兩部分組成,其中硬件部分采用了實時操作系統(tǒng),該系統(tǒng)能夠在數(shù)據(jù)或命令產(chǎn)生時對數(shù)據(jù)快速的處理。當有多個任務同時出現(xiàn),會按照任務的優(yōu)先級控制實時任務的運行,具有及時響應和高可靠性的特點。對于采摘機器人系統(tǒng)來說,不僅需要對機器人本體控制還要具有上傳機器人信息以及作業(yè)情況的功能,物聯(lián)網(wǎng)平臺就成了一個重要的工具,實現(xiàn)物聯(lián)網(wǎng)一般需要數(shù)據(jù)云,上傳數(shù)據(jù)的終端設備,以及獲取數(shù)據(jù)的設備三個基本元素組成。本文利用智能硬件常用的機智云物聯(lián)網(wǎng)平臺進行配置,并采用WIFI無線連接的形式接入機智云,上云的數(shù)據(jù)包括了機器人本體的信息以及采摘數(shù)量。
 ?◆物聯(lián)網(wǎng)平臺實現(xiàn)
?◆物聯(lián)網(wǎng)平臺實現(xiàn)
機智云物聯(lián)網(wǎng)平臺是一款應用于智能硬件開發(fā)與云計算應用的平臺。它為開發(fā)人員提供了一個智能的硬件開發(fā)工具以及一個開放的云計算平臺。該系統(tǒng)具有完整的SDK和API的服務功能,大大減少了硬件的開發(fā)難度和費用。本文設計的草莓采摘機器人,利用ESP-8266無線網(wǎng)絡模塊實現(xiàn)連接機智云服務器,實現(xiàn)采摘機器人本機信息以及采摘數(shù)量上報到手機或電腦客戶端,另外上報信息的種類可以根據(jù)需要進行擴展。
 ?開發(fā)機智云平臺的物聯(lián)網(wǎng)功能首先在機智云網(wǎng)站新建產(chǎn)品,接著新增數(shù)據(jù)點,數(shù)據(jù)點就是在移動端能看到的信息,本文共設置了五個數(shù)據(jù)點分別為:采摘數(shù)量、相機狀態(tài),機器人電量、機械手狀態(tài),機器人姿態(tài)。創(chuàng)建數(shù)據(jù)點的信息如圖2.5所示。其中設置采摘最大統(tǒng)計數(shù)量為65536,并且為可寫模式,也即在收獲一定數(shù)量后可以手動清零數(shù)量。電量的數(shù)據(jù)類型為報警模式當電壓低于11.7v時進入報警狀態(tài),機器人姿態(tài)的角度范圍為0度到360度,相機狀態(tài)和機械手狀態(tài)均用布爾值來表示。
?開發(fā)機智云平臺的物聯(lián)網(wǎng)功能首先在機智云網(wǎng)站新建產(chǎn)品,接著新增數(shù)據(jù)點,數(shù)據(jù)點就是在移動端能看到的信息,本文共設置了五個數(shù)據(jù)點分別為:采摘數(shù)量、相機狀態(tài),機器人電量、機械手狀態(tài),機器人姿態(tài)。創(chuàng)建數(shù)據(jù)點的信息如圖2.5所示。其中設置采摘最大統(tǒng)計數(shù)量為65536,并且為可寫模式,也即在收獲一定數(shù)量后可以手動清零數(shù)量。電量的數(shù)據(jù)類型為報警模式當電壓低于11.7v時進入報警狀態(tài),機器人姿態(tài)的角度范圍為0度到360度,相機狀態(tài)和機械手狀態(tài)均用布爾值來表示。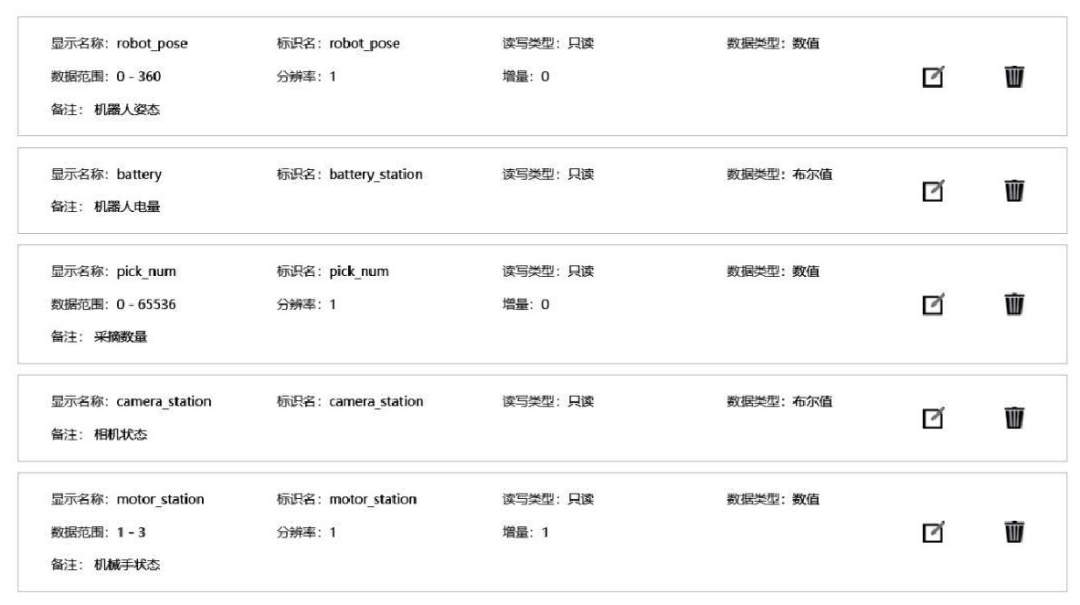 圖2.5 數(shù)據(jù)點的信息
圖2.5 數(shù)據(jù)點的信息完成數(shù)據(jù)點的設置后在網(wǎng)頁進行在線調(diào)試,模擬設備上報在移動端查看數(shù)據(jù),在模擬設備端調(diào)整數(shù)據(jù)后移動端端數(shù)據(jù)就會有相應改變,模擬設備端數(shù)據(jù)上報為{變量名:變量值}的形式。例如在模擬設備端設置電池狀態(tài)為1,相機狀態(tài)為1,機械手狀態(tài)為1, 機器人姿態(tài)為0,采摘數(shù)量為20得到的效果如圖2.6所示,由可知移動端更新正常,數(shù)據(jù)點可以正常使用。
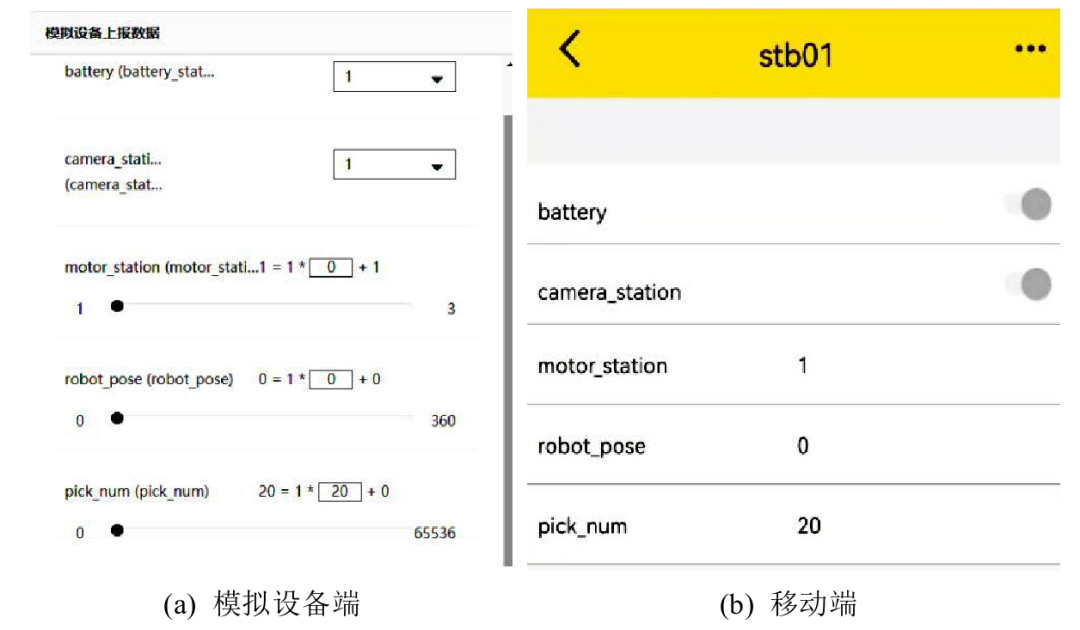 圖2.6 數(shù)據(jù)上報完成調(diào)試后利用機智云的MCU開發(fā)工具生成STM32的硬件代碼,由于生成的代碼 是hal庫的代碼,機器人底層控制代碼利用標準庫編寫,因此需要進行移植。根據(jù)機智云網(wǎng)絡協(xié)議,首先建立1毫秒的時間基準,然后將智能云數(shù)據(jù)接收功能添加到串口接收中斷處理功能中,并將其修改成真正的傳輸接口功能。最后在新建一個線程定時上報數(shù)據(jù),至此機智云移植完成。除此之外,啟動機智云的傳輸需要在系統(tǒng)初始化中設置ESP-8266為Soft-AP模式,機智云APP中才能搜索到設備進行連接。
圖2.6 數(shù)據(jù)上報完成調(diào)試后利用機智云的MCU開發(fā)工具生成STM32的硬件代碼,由于生成的代碼 是hal庫的代碼,機器人底層控制代碼利用標準庫編寫,因此需要進行移植。根據(jù)機智云網(wǎng)絡協(xié)議,首先建立1毫秒的時間基準,然后將智能云數(shù)據(jù)接收功能添加到串口接收中斷處理功能中,并將其修改成真正的傳輸接口功能。最后在新建一個線程定時上報數(shù)據(jù),至此機智云移植完成。除此之外,啟動機智云的傳輸需要在系統(tǒng)初始化中設置ESP-8266為Soft-AP模式,機智云APP中才能搜索到設備進行連接。03
草莓采摘機器人實驗與分析
通過對五次的采摘過程進行記錄統(tǒng)計每個過程的耗時如表2所示,圖像識別的過程的平均時長為0.23s,機械臂移動到目標點并采摘放置的平均時間為6.8s,總時長在7s左右。將采摘后的草莓放置到果籃的過程耗時較長,原因是果籃在機械手的正后方,放置草莓需要將機械手回轉(zhuǎn)180°。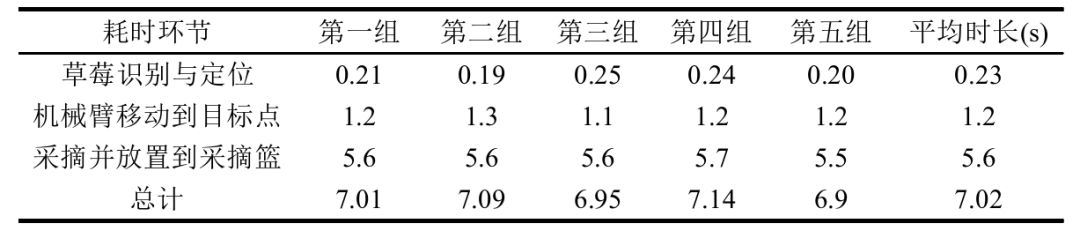 表2 采摘耗時分段表
表2 采摘耗時分段表
采用mm2020mm的型材搭建了草莓架,草莓架長度方向為3000mm,高度方向為 500mm。本實驗只考慮室內(nèi)采摘的情況。采摘過程如圖3所示,a表示了采摘機器 人移動到草莓的正前方;b中機械手移動到果實的正上方;c中末端執(zhí)行器夾爪 閉合;d果莖被剪斷;e機械手放低姿態(tài);f和g機械手旋轉(zhuǎn)至果籃上方;h機械手末端執(zhí)行器打開草莓落入果籃中,至此一個草莓采摘周期完成。
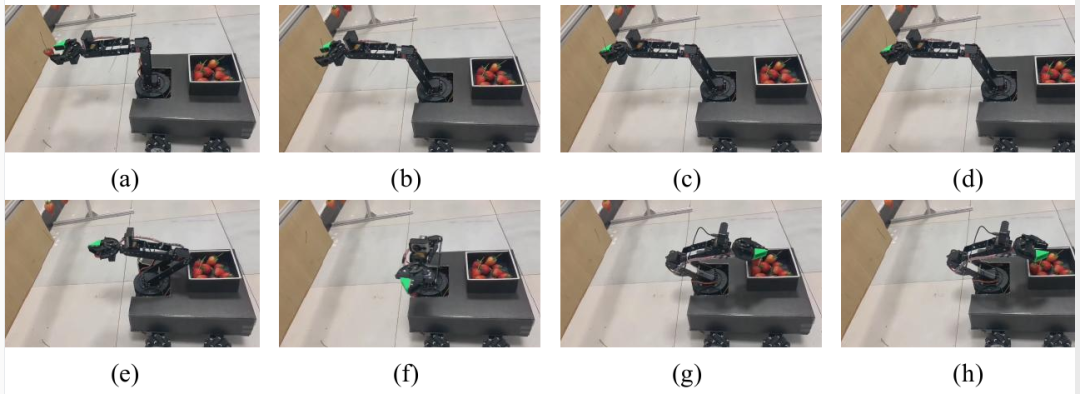 圖3 采摘過程圖
圖3 采摘過程圖04
總結(jié)
本設計完成了采用麥克納姆全向移動底盤的四自由度機械手并包含視覺識別的草莓采摘機器人樣機,實現(xiàn)了移動平臺的自由行走,綜合閾值法和卷積神經(jīng)網(wǎng)絡的優(yōu)點以及機械手對草莓的收獲。在草莓采摘機器人軟硬件的設計,對草莓采摘機器人的硬件模塊以及主控芯片進行選型,同時對電源電路、驅(qū)動電路、編碼器的連接電路等進行PCB設計和打樣。底層硬件程序框架采用了RT-Thread實時操作系統(tǒng),視覺識別程序運行在樹莓派中并使用無線模塊將采摘信息和機器人狀態(tài)上傳至機智云物聯(lián)網(wǎng),可在電腦端和手機端同時查看。

了解更多:
◆機智云開發(fā)者社區(qū):club.gizwits.com
◆機智云官方淘寶店鋪:
http://shop159680395.taobao.com/index.htm◆客服電話/機智云Kiki:18002215823(微信同號)
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
機智云
+關(guān)注
關(guān)注
2文章
590瀏覽量
26433
原文標題:IoT畢設 | 機智云物聯(lián)網(wǎng)云平臺+STM32+樹莓派的草莓采摘機器人控制系統(tǒng)
文章出處:【微信號:IoTMaker,微信公眾號:機智云開發(fā)者】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
STM32連接機智云,代碼移植,NTP實時時間獲取(一)
科技有限公司旗下品牌,全球領(lǐng)先的智能IoT開發(fā)及云服務平臺,國內(nèi)首個物聯(lián)網(wǎng)自助開發(fā)平臺,第三方

類樹莓派網(wǎng)關(guān):物聯(lián)網(wǎng)應用的新標桿
的特點是體積小巧(大約信用卡大小),但功能齊全,足以支持多種計算任務。 樹莓派經(jīng)常被用作物聯(lián)網(wǎng)網(wǎng)關(guān),收集設備數(shù)據(jù),然后將數(shù)據(jù)上傳云平臺,并還

MQTT物聯(lián)網(wǎng)云平臺有什么功能
隨著物聯(lián)網(wǎng)(IoT)技術(shù)的迅猛發(fā)展,MQTT(Message Queuing Telemetry Transport)物聯(lián)網(wǎng)
工業(yè)物聯(lián)網(wǎng)(IOT)云平臺是什么
、集成和智能化管理,從而為企業(yè)帶來前所未有的生產(chǎn)效率提升和資源配置優(yōu)化。 工業(yè)物聯(lián)網(wǎng)(IoT)云平臺的定義 工業(yè)
物聯(lián)網(wǎng)云平臺是什么
隨著信息技術(shù)的迅猛發(fā)展,物聯(lián)網(wǎng)(IoT)已經(jīng)成為推動社會進步和產(chǎn)業(yè)升級的重要力量。物聯(lián)網(wǎng)云
機智云平臺定制開發(fā):國產(chǎn)企業(yè)級低代碼AIoT物聯(lián)網(wǎng)解決方案
據(jù)和人工智能的領(lǐng)先企業(yè),推出了一款國產(chǎn)化企業(yè)級低代碼 AIoT 物聯(lián)網(wǎng)平臺,為各行各業(yè)提供了強大的定制開發(fā)解決方案。 ? 平臺概述 機智
簡述工業(yè)機器人控制系統(tǒng)的特點
工業(yè)機器人控制系統(tǒng)是工業(yè)機器人的核心組成部分,它負責接收輸入信號、處理信息、控制機器人的運動和執(zhí)行任務。隨著工業(yè)自動化和智能制造的快速發(fā)展,
基于機智云物聯(lián)網(wǎng)的智能花卉栽培系統(tǒng)
WiFi傳輸實現(xiàn)信息交互,并在機智云物聯(lián)網(wǎng)平臺實現(xiàn)實時監(jiān)測和遠程操控。種植者可遠程監(jiān)測土壤溫濕度、環(huán)境溫濕度、CO2濃度、光照強度,并通過A
基于機智云物聯(lián)網(wǎng)平臺的智能垃圾回收箱與控制系統(tǒng)研究
一款基于機械傳動、嵌入式系統(tǒng)和物聯(lián)網(wǎng)技術(shù)的智能垃圾回收箱及控制系統(tǒng)。結(jié)合功能需求設計了結(jié)構(gòu)方案,包括尺寸、開關(guān)門、防夾手機和稱重結(jié)構(gòu)等;選型硬件包括主
發(fā)表于 04-09 17:25
基于機智云物聯(lián)網(wǎng)智能家居系統(tǒng)
目錄1、功能實現(xiàn)2、軟、硬件系統(tǒng)設計3、結(jié)論1功能實現(xiàn)采用機智云APP實現(xiàn)全球控制,利用無線網(wǎng)絡技術(shù)連接家居設備到終端,實現(xiàn)智能操作。智能家居控制系
基于 STM32 和機智云智能門鎖的實現(xiàn)
關(guān)鍵詞:智能門鎖、STM32、機智云、APP目錄1、功能實現(xiàn)2、軟、硬件系統(tǒng)設計3、系統(tǒng)調(diào)試4、結(jié)論1功能實現(xiàn)本
基于機智云物聯(lián)網(wǎng)的PCR溫度控制
本文設計了基于物聯(lián)網(wǎng)的PCR溫度控制系統(tǒng),能夠?qū)崿F(xiàn)快速、準確的溫度控制。通過將檢測設備端接入機智云
PLC設備接入網(wǎng)關(guān)實現(xiàn)工廠PLC接入物聯(lián)網(wǎng)IOT云平臺
據(jù)管理方面存在一些困難。物通博聯(lián)提供PLC設備接入網(wǎng)關(guān),可以將PLC設備接入物聯(lián)網(wǎng)IOT云平臺。

基于樹莓派的四足噴水機器人設計
今天小編給大家?guī)淼氖莵碜訠-AROL-O團隊帶來的基于樹莓派的四足噴水機器人,該機器人可以在農(nóng)場環(huán)境中自主導航,識別需要澆水的植物并自動澆水,視覺






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論