


PSO(粒子群算法)在處理連續問題上有著較強的能力,因此很適合用來做參數優化,而PID控制器由三個參數組成,它們分別是:Kp 、Ki 、Kd 。
我們可以把PID控制器當做一個“黑箱”,輸入為這三個參數,輸出為響應曲線,我們要做的就是優化這個響應曲線。而一個控制效果好的PID控制器應針對不同類型輸入都有較快的響應速度,較小的超調以及穩態誤差。在本次分享中,選擇輸入信號為階躍輸入用來衡量PID控制效果。
PSO的適應函數選用綜合指標來衡量設計效果,由于是數字控制器,我們選用求和而不是積分的方式:
在特定的問題中,這個適應函數也可以按照實際需求修改,比如分析超調量、穩定時間等,具體問題具體分析
PSO的主函數和之前的案例類似
參數設置
wmax = 1; % 最大慣性因子
wmin = 0.6; % 最小慣性因子
% w = 0.6; % 慣性因子
c1 = 2; % 加速常數
c2 = 2; % 加速常數
Dim = 3; % 維數
SwarmSize = 30; % 粒子群規模
ObjFun = @PSO_PID; % 待優化函數句柄
MaxIter = 10; % 最大迭代次數
MinFit = 0.1; % 最小適應值
Vmax = 1;
Vmin = -1;
Ub = [300 300 300];
Lb = [0 0 0];
其中的Ub和Lb分別是kp ki kd的上下限,開始優化的時候可以設置大一點,如果大概知道范圍,也可以縮小范圍,減少迭代次數
粒子群初始化
Range = ones(SwarmSize,1)*(Ub-Lb);
Swarm = rand(SwarmSize,Dim).*Range + ones(SwarmSize,1)*Lb; % 初始化粒子群
VStep = rand(SwarmSize,Dim)*(Vmax-Vmin) + Vmin; % 初始化速度
fSwarm = zeros(SwarmSize,1);
for i=1:SwarmSize
fSwarm(i,:) = PSO_PID(Swarm(i,:)); % 粒子群的適應值
end
%% 個體極值和群體極值
[bestf,bestindex]=min(fSwarm);
zbest=Swarm(bestindex,:); % 全局最佳
gbest=Swarm; % 個體最佳
fgbest=fSwarm; % 個體最佳適應值
fzbest=bestf; % 全局最佳適應值
迭代尋優
iter = 0;
y_fitness = zeros(1,MaxIter); % 預先產生4個空矩陣
K_p = zeros(1,MaxIter);
K_i = zeros(1,MaxIter);
K_d = zeros(1,MaxIter);
while( (iter < MaxIter) && (fzbest > MinFit) )
w = wmax-(wmax-wmin)/MaxIter*iter; %% 慣性權重因子調整
for j=1:SwarmSize
% 速度更新
VStep(j,:) = w*VStep(j,:) + c1*rand*(gbest(j,:) - Swarm(j,:)) + c2*rand*(zbest - Swarm(j,:));
if VStep(j,:) >Vmax, VStep(j,:)=Vmax; end
if VStep(j,:)< Vmin, VStep(j,:)=Vmin; end
% 位置更新
Swarm(j,:)=Swarm(j,:)+VStep(j,:);
for k=1:Dim
if Swarm(j,k) >Ub(k), Swarm(j,k)=Ub(k); end
if Swarm(j,k)< Lb(k), Swarm(j,k)=Lb(k); end
end
% 適應值
fSwarm(j,:) = PSO_PID(Swarm(i,:));
% 個體最優更新
if fSwarm(j) < fgbest(j)
gbest(j,:) = Swarm(j,:);
fgbest(j) = fSwarm(j);
end
% 群體最優更新
if fSwarm(j) < fzbest
zbest = Swarm(j,:);
fzbest = fSwarm(j);
end
end
iter = iter+1; % 迭代次數更新
y_fitness(1,iter) = fzbest; % 為繪圖做準備
K_p(1,iter) = zbest(1);
K_i(1,iter) = zbest(2);
K_d(1,iter) = zbest(3);
end
繪圖輸出
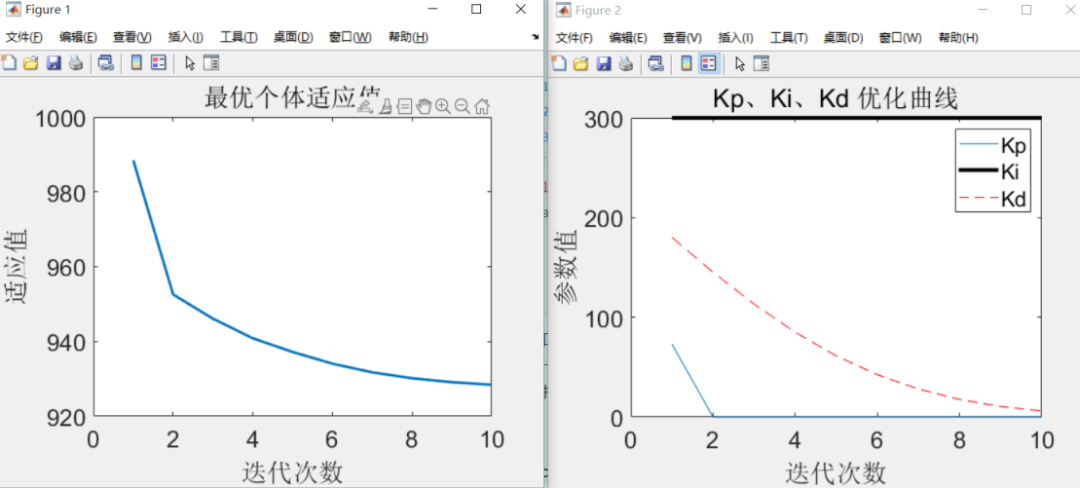
figure % 繪制性能指標ITAE的變化曲線
plot(y_fitness,'LineWidth',2)
title('最優個體適應值','fontsize',18);
xlabel('迭代次數','fontsize',18);ylabel('適應值','fontsize',18);
set(gca,'Fontsize',18);
figure % 繪制PID控制器參數變化曲線
plot(K_p)
hold on
plot(K_i,'k','LineWidth',3)
plot(K_d,'--r')
title('Kp、Ki、Kd 優化曲線','fontsize',18);
xlabel('迭代次數','fontsize',18);ylabel('參數值','fontsize',18);
set(gca,'Fontsize',18);
legend('Kp','Ki','Kd');
目標函數設計
function z=PSO_PID(x)
assignin('base','Kp',x(1)); %粒子依次賦值給Kp
assignin('base','Ki',x(2)); %粒子依次賦值給Ki
assignin('base','Kd',x(3)); %粒子依次賦值給Kd
try %% simulink仿真異常,返回一個極大值
y_out=sim('PID_Model',[0,20]); %使用命令行運行控制系統模型
z = y_out.yout{1}.Values.Data(end);
catch
z=1e6;
end
代碼中assignin實現了m文件和simulink傳遞參數,其中y_out是simulink輸出的目標變量,為啥這兒需要一個try呢,因為這個優化的過程中,可能參數設置不合理,會拋出simulink報錯,故增加一個try避免代碼異常出錯提前結束優化過程
simulink模型用一個簡單的pid控制帶時延的傳遞函數
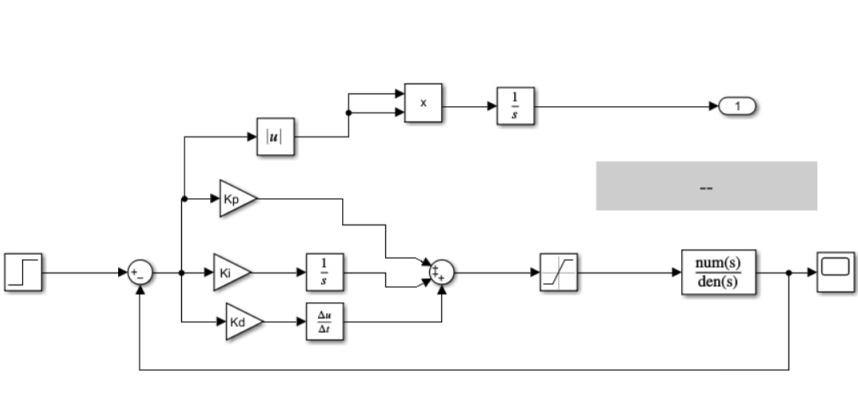
仿真結果類似這樣,因為迭代次數很少,設計中可以加大,得到更優的結果
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
MATLAB仿真
+關注
關注
4文章
176瀏覽量
20397 -
PID控制器
+關注
關注
2文章
173瀏覽量
19222 -
粒子群算法
+關注
關注
0文章
63瀏覽量
13230 -
數字控制器
+關注
關注
0文章
101瀏覽量
19840 -
simulink仿真
+關注
關注
0文章
75瀏覽量
8783
發布評論請先 登錄
相關推薦
熱點推薦
永磁同步直線電機的粒子群PID空間矢量控制
PID 控制器,并通過 MAT- LAB/Simulink 對永磁同步直線電機和其空間矢量控制系統進行建模和仿真實驗。仿真結果表明,采用粒子群優化
發表于 03-27 12:07
改進粒子群算法的永磁同步電機PID控制器
參數進行控制約束參量分析。采用改進的粒子群算法進行PD控制的加權訓練,實現控制目標畫數最優化求解,進行永磁同步電機PID 控制律
發表于 05-28 15:44
PSO算法在數控機床交流伺服系統PID參數優化中的應用
PSO算法在數控機床交流伺服系統PID參數優化中的應用摘要:針對發展高精度數控機床的要求,在數控機床交流伺服控制系統
發表于 05-17 11:38
粒子群算法城鎮能源優化調度問題
computation)。源于對鳥群捕食的行為研究。粒子群優化算法的基本思想:是通過群體中個體之間的協作和信息共享來尋找最優解.PSO的優勢:在于簡單容易實現并且沒有許多
發表于 07-07 06:04
基于粒子群優化的模糊PID控制器研究
針對閥控非對稱伺服缸非線性、參數時變的特點,考慮到油液壓縮特性的影響,建立了包含變體積彈性模量的系統數學模型。提出一種基于粒子群算法優化( PSO)的模糊自適應
發表于 03-05 16:00
?2次下載
如何使用免疫粒子群優化算法實現增量式的PID控制
基于粒子群優化算法的收斂速度快簡單易實現的特點和免疫算法的免疫記憶、免疫自我調節和多峰值收斂的特點,本文設計出免疫粒子群
發表于 11-01 15:41
?7次下載






 工商網監
工商網監

評論