 基于場景的智能網聯汽車模擬仿真測試評估方法與實踐
基于場景的智能網聯汽車模擬仿真測試評估方法與實踐
導
語
搭載自動駕駛功能的智能網聯汽車因可在其設計運行條件內承擔全部動態駕駛任務,面臨安全驗證與評估挑戰。基于場景的智能網聯汽車安全測試評估方法已成為廣泛的行業共識,模擬仿真測試是其重要手段之一。從第三方視角,針對自動駕駛安全性、高場景覆蓋度、邏輯完備性等測試驗證目標,搭建基于軟件在環的模擬仿真測試環境框架,在此基礎上研究基于設計運行條件覆蓋的測試場景集構建方法,探索形成一套高可信智能網聯汽車模擬仿真測試評估方法,并在特定應用場景進行初步實踐。研究成果為模擬仿真測試在智能網聯汽車安全測試與評估中的落地應用提供了參考。
隨著自動駕駛技術的快速發展,智能網聯汽車在改善出行的同時,預期功能安全等新的安全風險也日益凸顯。為實現“與人類駕駛安全性能相比具有正向風險平衡”的目標[1],智能網聯汽車面臨海量場景測試挑戰[2]。與實車測試方法相比,模擬仿真測試以其高效率、低成本、高安全、高覆蓋度等優勢,成為測試驗證系統安全的重要支柱之一[3-4],在智能網聯汽車綜合安全評估中發揮著至關重要的作用。 國內外學者、機構在模擬仿真測試方法、測試場景、仿真建模、工具鏈可信度等方面已開展大量基礎研究工作[5-8]。針對產品的不同階段,不同類型的模擬仿真測試方法不僅應用于智能網聯汽車開發過程,在產品驗證、確認和評估中也逐步扮演重要角色。聯合國在針對L3自動駕駛功能自動車道保持系統(Automated Lane Keeping Systems,ALKS)的型式批準法規中提出可以采用模擬仿真測試的手段進行測試驗證,并對仿真工具、模型等提出相關要求[9-10],日本在其型式批準實施中明確引入軟件在環(Software-in-the-loop,SIL)和硬件在環(Hardware-in-the-loop,HIL)測試[11]。聯合國自動駕駛驗證方法非正式工作組(VMAD IWG)提出的新測試評估方法(NATM)中要求使用經驗證的仿真工具鏈,進行模擬仿真測試來評估自動駕駛系統(Automated Driving System,ADS)安全性,并提出SIL測試適用于駕駛安全及關鍵安全場景評估[12]。歐盟在關于自動駕駛系統型式批準要求的法規草案中明確可以采用模擬仿真、封閉場地和實際道路等測試方法,并引入聯合國關于模擬仿真測試可信度研究的成果[13]。ISO制定的車輛動力學仿真模型及測試方法等相關標準,為車輛動力學仿真測試驗證提供基礎[14-15]。Sch?ner[16]等研究提出SIL測試是解決復雜和困難場景下控制算法驗證、行為和規則合規性驗證的有效手段。國內相關機構從第方視角研究提出一套智能網聯汽車安全測試評估方法,并明確將模擬仿真測試用于評估智能網聯汽車在多樣化場景和復雜條件下的功能及性能驗證[17]。以上研究表明,隨著技術的成熟,模擬仿真測試能為智能網聯汽車安全測試評估提供重要支撐,其中,SIL測試以其低成本、低風險、高效率和高覆蓋度等優勢,成為驗證智能網聯汽車安全性,尤其功能不足和算法缺陷等問題的重要手段。 本文在國內外模擬仿真測試技術研究以及相關實踐應用的基礎上,結合我國智能網聯汽車安全管理需求,站在第三方視角,聚焦搭載自動駕駛功能的智能網聯汽車產品安全,提出一套基于SIL的模擬仿真測試評估方法,重點從模擬仿真測試環境框架、基于設計運行條件(Operational Design Condition,ODC)覆蓋的測試場景集生成方法、測試環境可信度驗證與評估等方面進行分析。此外,對模擬仿真測試驗證評估流程進行研究梳理,并針對自動駕駛系統特定場景應用開展初步的測評實踐。
1
模擬仿真測試方法研究
1.1模擬仿真測試總體框架
模擬仿真測試方法以自動駕駛功能定義、ODC、安全要求等測試輸入為基礎,從測試環境搭建、覆蓋ODC的測試場景集構建以及可信度驗證與評估三個方面開展具體研究,總體研究框架如圖1所示。
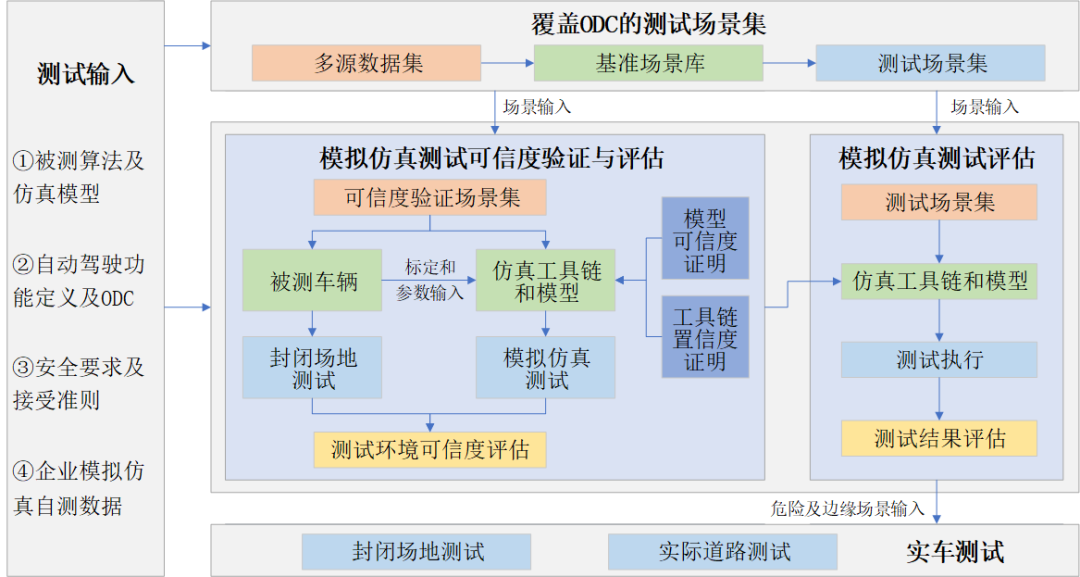
圖1 基于場景的智能網聯汽車模擬仿真測試總體研究框架
1.2模擬仿真測試輸入
模擬仿真測試輸入包括被測算法及仿真模型、自動駕駛功能定義及ODC、安全要求及接受準則、企業模擬仿真自測數據等。
(1)被測算法及仿真模型:提供待測試驗證的自動駕駛算法,以及搭載自動駕駛功能車型的車輛動力學模型及參數,自動駕駛系統相關的傳感器配置、模型及參數,并提供車輛動力學模型和傳感器模型的可信度驗證和評估證明。
(2)自動駕駛功能定義及ODC[18-19]。
(3)安全要求及接受準則[4]。安全要求包括對動態駕駛任務執行、系統后援、危險情況、系統失效等的要求。同時根據安全要求,制定合理的風險接受準則。
(4)企業模擬仿真自測數據:提供企業模擬仿真自測關鍵數據,包括仿真測試場景集、測試工具鏈、仿真模型、仿真測試結果等。
1.3 模擬仿真測試環境搭建
模擬仿真測試以測試場景集為基礎,通過對環境、傳感器、車輛動力學等模擬,搭建自動駕駛系統測試所需的測試環境,實現自動駕駛系統在模擬交通場景中的高效率、高覆蓋度測試。本文基于政策、法規、標準、工具等研究基礎,結合行業探索實踐[20],以自動駕駛算法為測試對象,構建模擬仿真測試環境搭建的通用框架,如圖2所示。
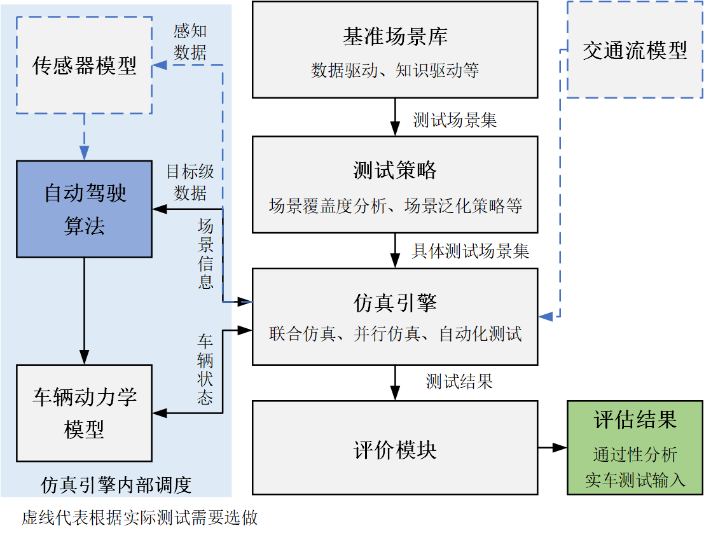
圖2 模擬仿真測試環境框架
模擬仿真測試以基于ODC覆蓋的方法建立的測試場景集為輸入,導入傳感器模型(如需)和車輛動力學模型,在場景覆蓋度分析、場景泛化策略分析等測試策略指導下,融合交通流模型(如需)提供的模擬交通流,通過場景解析、地圖解析、仿真運算、模型耦合、時間同步等運算處理實現對測試場景的模擬,建立自動駕駛算法測試所需的測試環境。 在具體測試過程中,傳感器模型(如需)通過測試場景獲取道路、交通流、環境等信息,并將原始數據或目標級數據輸入給自動駕駛算法,自動駕駛算法將經過感知、規劃、決策、控制等模塊計算得到的車控指令輸入給車輛動力學模型,以驗證自動駕駛算法功能的實現情況。模擬仿真測試還可以通過聯合仿真、并行仿真、自動化測試等方式提高測試精度和效率。 完成具體測試后,仿真引擎將測試結果輸出至評價模塊,評價模塊基于指標體系的量化指標,進行通過性分析,形成自動駕駛算法模擬仿真測試評估結果。此外,通過對測試結果進行分析,識別模擬仿真測試過程中的危險場景和邊緣場景,為封閉場地測試場景選擇和實際道路測試道路的測試場景選擇提供依據。
1.4 模擬仿真測試場景集構建
國內外針對自動駕駛系統安全性測試的場景集已開展廣泛研究與建設,如美國Mcity[21]、日本SAKURA[22]、英國MUSSIC[23]、智能網聯汽車場景數據服務平臺[24]等。 為滿足場景覆蓋度要求,測試場景集應涵蓋ODC內及邊界的各類場景,測試場景應包括ODC涉及的各類場景要素,如道路、交通、天氣、車輛狀態等。首先基于自然駕駛、法規、標準、交通事故等多種數據來源,構建由多源數據驅動的基準場景庫;然后對被測車輛自動駕駛功能定義、ODC、安全要求等進行分析,篩選測試邏輯場景,并確定相關參數取值區間和概率分布,形成測試場景集;最后通過對取值區間和概率區間進行分層采樣,對邏輯場景進行泛化,提取具體測試場景集,具體流程如圖3所示。
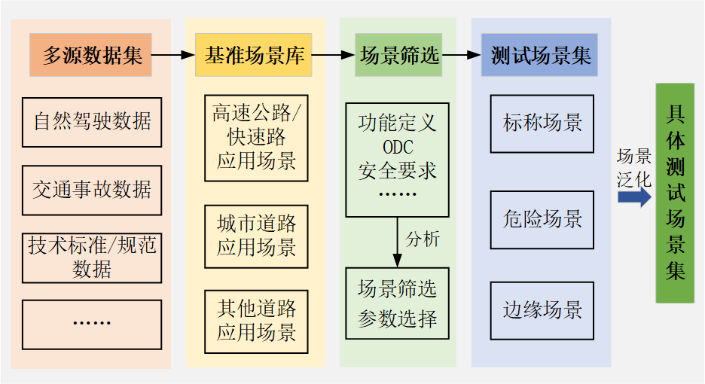
圖3 覆蓋ODC的測試場景集構建
圖4所示為針對高速公路/快速路應用場景下有條件自動駕駛系統交互場景測試場景集的部分示例,其中,圖5所示為No.4(直道-主車道行駛-無前車-目標車切入)場景示例。
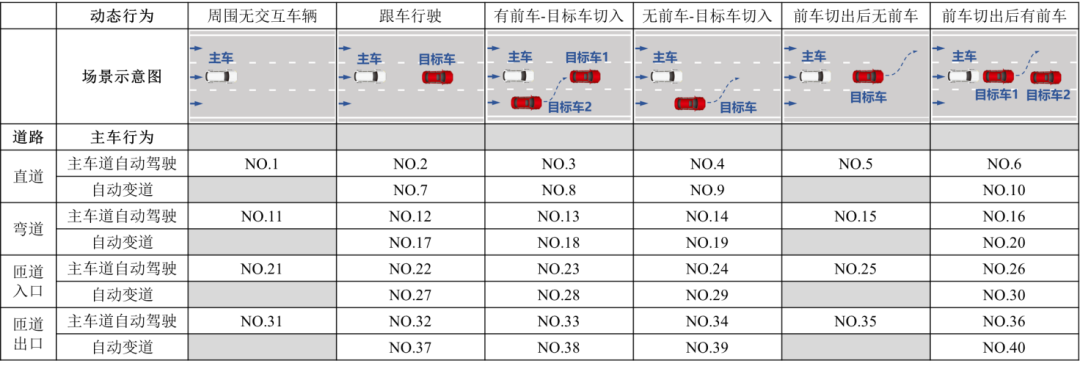
圖4 測試場景集部分示例
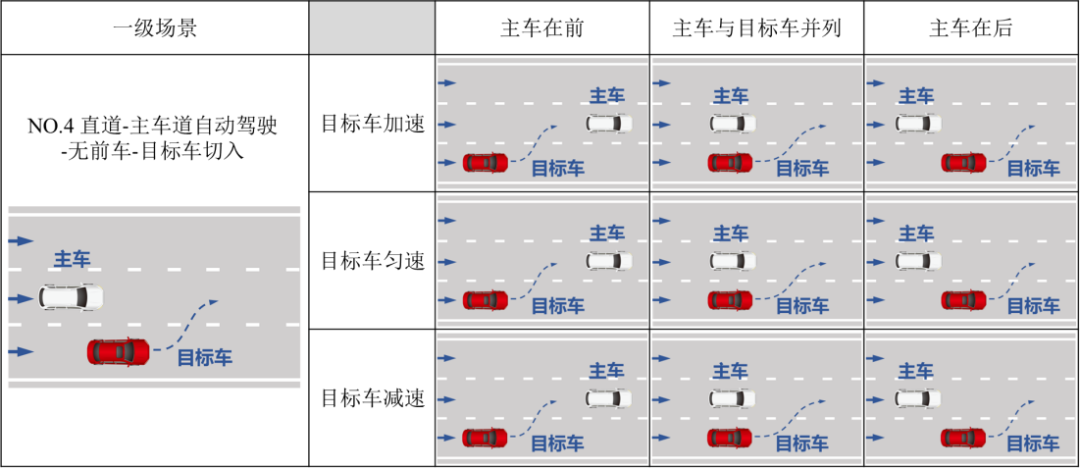
圖5 測試場景示例
1.5 測試可信度驗證與評估
模擬仿真測試可信度用于驗證仿真工具鏈、仿真模型以及測試環境等對實際測試過程中準確性、可靠性等要求的滿足情況[25]。聯合國、歐盟、日本等相關技術法規允許將模擬仿真測試用于型式批準測試,同時明確對仿真工具鏈、仿真模型等的可信度要求[9-13, 26]。1.5.1 測試工具鏈置信度要求測試工具鏈包含場景管理模塊、仿真引擎、評價模塊等。測試工具鏈的置信度要求取決于測試工具的預期使用目的、工具失效相關的風險、相關項或要素的汽車安全完整性等級(ASIL)等[27]。 模擬仿真工具鏈中的核心模塊應通過置信度確認,以保障在仿真運算過程中,不會出現因仿真軟件本身引發的計算錯誤、算法邏輯變更、超預期的信號時序變更、同步狀態改變等問題,或者在錯誤發生時能夠及時發現。 工具鏈需要從設計開發到測試驗證進行全流程的安全評估保障,包括軟件安全需求、代碼架構、代碼優化、合規性檢測、數據流、控制流、單元設計、單元測試、集成測試等。 通過使用中積累置信度、工具開發流程評估、軟件工具確認、按照安全標準開發等方法,以得出工具的潛在錯誤和使用限制要求,應按以下準則進行仿真工具鏈的確認:(1)應提供仿真工具鏈符合分級中指定用途的特定要求的證據。(2)應對確認中發生的仿真工具鏈功能異常及其相應錯誤輸出、其可能的后果信息、及避免或探測它們的措施進行分析。(3)應檢查仿真工具鏈對異常運行條件的響應。例如,可預見的誤用、不完整的輸入數據、使用被禁止的配置設置組合等。
1.5.2 模型可信度模型可信度是指在基于場景的測試中,仿真測試與實車測試結果之間的統計不確定性或誤差[28]。模型可信度有三層概念:(1)所有的實車測試軌跡在模擬仿真中都是可能的,并有相同的行為決策;(2)每個模擬仿真測試軌跡至少有一個實車測試軌跡對應;(3)仿真測試軌跡和實車測試軌跡的可能性是相同的。基于概念(3),假設兩者發生概率相同,則表明模型是可信的。剩下的誤差是統計上的不確定性,可通過模型標定,來降低模型參數后驗分布的不確定性。 由于傳感器模型和動力學模型誤差,在對比過程中應分別觀察實車和仿真運動曲線的趨勢是否一致。選取合理的觀察點,重點分析曲線拐點是否有狀態判斷、對自動駕駛算法的狀態跳轉的判定是否正確等,而非重點關注曲線具體數值。
1.5.3 測試環境可信度驗證測試環境可信度驗證需要在相關測試場景集的較小但具有足夠代表性子集上執行[12, 29-30],具體流程如下:(1)選擇用于可信度驗證的場景和參數:從測試場景集中,選擇用于可信度驗證的子集,以及影響仿真結果的性能特征參數。(2)實車標定實驗:在進行驗證測試之前,執行實車標定試驗,以測量需要在模擬工具中輸入或調整的參數。(3)輸入和調整仿真工具和環境的設置:根據要在模擬中使用的目標車輛的參數(如整備質量)和從“實車標定實驗”中獲得的數據輸入和調整設置(如制動性能)。(4)確認可信度的實車測試:從可信度驗證場景集中選擇場景進行實車測試,如封閉場地測試。(5)確認可信度的仿真測試:從可信度驗證場景集中選擇場景進行模擬仿真測試。(6)確認測試環境的可信度:對比實車測試和模擬仿真測試結果,確認仿真環境的可信度。
2
模擬仿真測試與評估
基于搭建的高可信度測試環境,結合具體測試場景集,對自動駕駛算法開展大規模場景下的模擬仿真測試,以驗證其在ODC內及邊界的安全性[12,31]。具體測試與評估流程如圖6所示,主要包括測試需求分析、測試資源配置和接口定義、測試用例生成、測試執行、測試結果評估等。
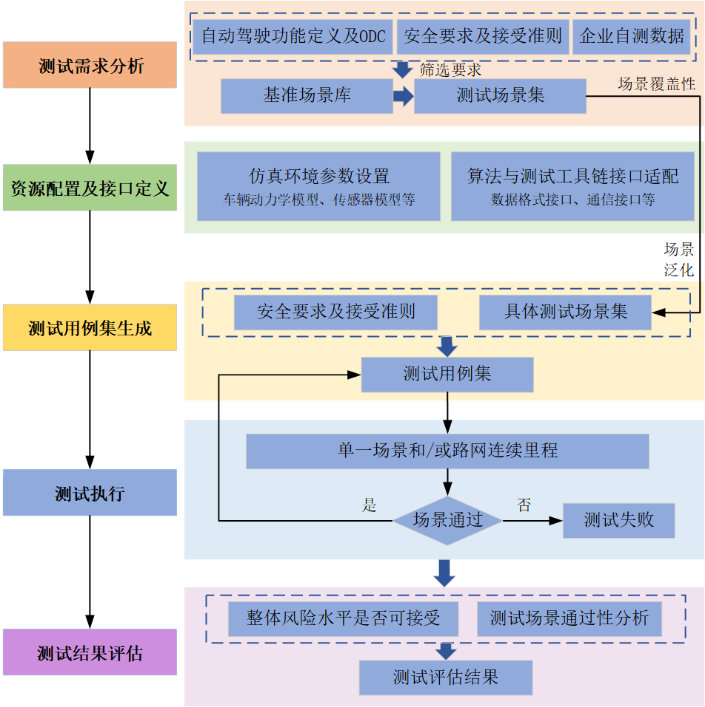
圖6 模擬仿真測試與評估流程
(1)測試需求分析:測試前,應根據自動駕駛功能定義、ODC、安全要求、接受準則等識別模擬仿真測試場景集并制定測試方案。(2)測試資源配置及接口定義:對仿真環境進行參數設置,如車輛動力學模型、傳感器模型等;對自動駕駛算法和測試工具鏈間接口進行匹配和定義,包括數據格式接口、通信接口等。(3)測試用例集生成:依據測試場景集泛化生成具體測試場景集。根據自動駕駛系統的安全要求和接受準則進行敏感性分析,實現降低參數空間維度,得到覆蓋被測自動駕駛系統功能和ODC的充分合理的模擬仿真安全測試用例集。(4)測試執行:在具體測試過程中,被測系統算法可進行單一場景和/或路網連續里程仿真測試。若某場景試驗結果為不通過,則該場景的仿真測試失敗[32]。當完成所有仿真測試用例的測試后,模擬仿真測試結束。(5)測試結果評估:基于自動駕駛系統的安全要求和測試結果,對系統進行安全評估,并與評價標準進行比較,判斷整體風險水平是否可接受和測試場景通過性。
3
模擬仿真測試與評估實踐
以圖4中No.2跟隨前車行駛場景為例,在自動駕駛功能開啟狀態下主車跟隨前方目標車輛行駛,在主車車道內目標車加速或減速運動,如圖7所示。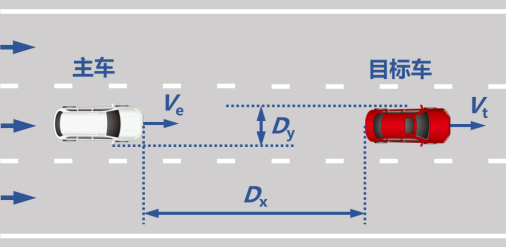
圖7 跟隨前車行駛場景示意圖
測試準備和執行部分,僅列出在驗證測試環境可信度的四個典型場景下,模擬仿真和封閉場地測試的結果對比作為示例。3.1 測試準備
3.1.1測試對象及測試工具鏈本次測試實踐中,根據不同自動駕駛功能設計特征,選用兩款車型分別進行低速和高速自動駕駛功能測試,選取中國第一汽車集團有限公司的紅旗E-HS9車型進行低速工況下的功能測試,廣州汽車集團股份有限公司的AION LX車型進行高速工況下的功能測試。模擬仿真測試工具鏈基于北京賽目科技有限公司的Sim Pro 1.8.0版本[33],與仿真測試對比的實車測試分別在一汽及廣汽試驗場實施。3.1.2 測試條件選擇為排除環境因素對實車傳感器探測性能的干擾,選擇在空曠、車道線清晰、無其他干擾車的封閉場地內,對目標車加速、減速兩個場景進行仿真和實車對比測試。
3.1.3 主車與目標車參數定義(1)縱向與橫向距離 縱向距離表示從主車的前沿到目標車后沿的距離,單位m;初始縱向距離表示在時間t=0s時刻主車與目標車之間的縱向距離;橫向距離表示兩輛車相對邊線之間的距離,單位m,本實驗中1.4m < ?≤ 1.85m;初始橫向距離Dy0表示在t=0s時刻主車與目標車之間的橫向距離。 (2)速度 主車速度,單位km/h;目標車速度,單位km/h;主車初始速度:主車在t=0s時刻的速度,單位m/s;目標車初始速度:目標車在t=0s時刻的速度,單位m/s。 (3)加速度 主車加速度,單位m/s2;目標車加速度,單位m/s2;車輛加速過程加速度為正,減速過程加速度為負。
3.1.4 道路參數設置
道路參數具體設置如表1所示。
表1道路參數設置
| 參數 | 值(類型) |
| 車道數 | 3 |
| 車道寬度/m | 3.75 |
| 車道線寬度/m | 0.15 |
| 車道線類型 | 虛線 |
| 道路附著系數 | 0.85 |
| 路面坡度 | 水平 |
| 道路曲率 | 直道 |
3.1.5 通過準則針對跟車場景,在跟車行駛過程中保持跟車時距,根據前方目標車情況控制主車加減速行駛并不得與前車發生碰撞,跟車時距不小于系統設定的最小跟車時距,TTC不小于系統設定的安全閾值(閾值隨車速變化)。 針對上述方案,分別對加速、減速兩個場景下的跟車距離、速度、加速度三個指標進行觀察,分析其運動學曲線,關注數據拐點符合度和運動趨勢,進行綜合結果判定。
3.2測試執行
3.2.1 低速工況
(1)目標車加速場景 初始條件:=0km/h,=0km/h,=3.2m。目標車以=1.2m/s2起步加速至30km/h后勻速行駛,主車穩定行駛后試驗結束,結果如圖8所示。
(a)動態跟車距離
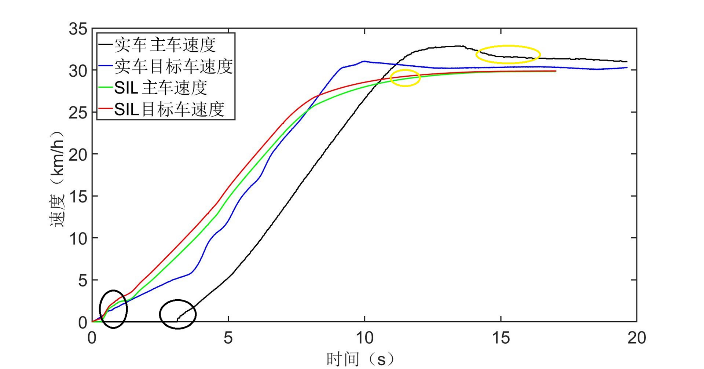
(b)主車與目標車速度
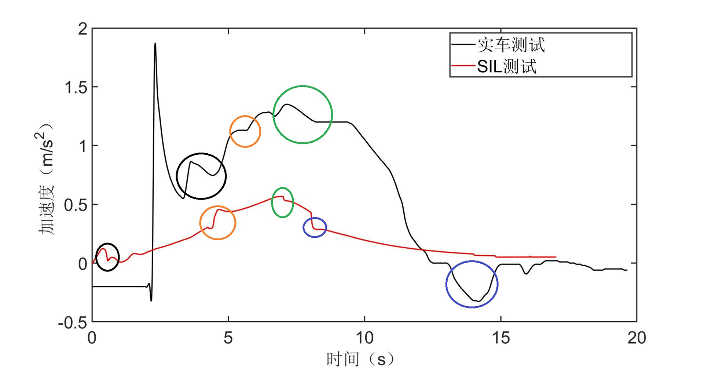
(c)主車加速度
圖8 目標車加速場景
(2)目標車減速場景 初始條件:=18.9km/h,=19.2km/h,=9.6m。目標車以=19.2km/h勻速行駛,主車穩定跟隨后,目標車以=-2m/s2減速,主車跟隨制動直至停車,結果如圖9所示。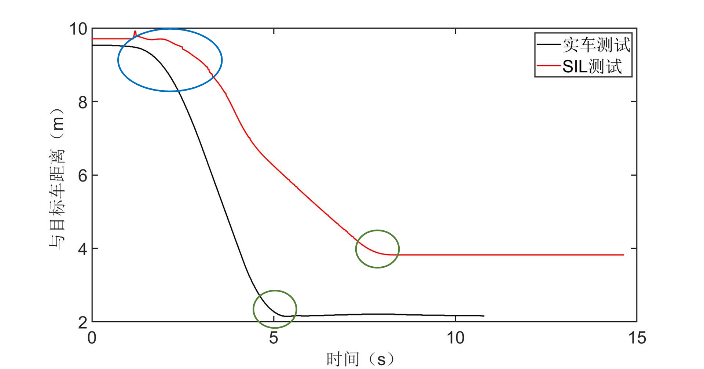
(a)動態跟車距離
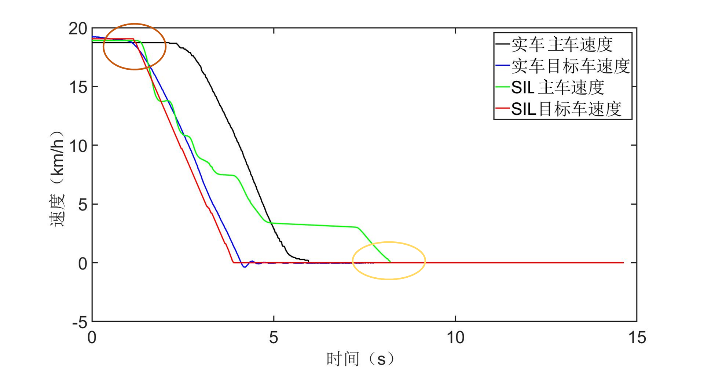
(b)主車與目標車速度
(c)主車加速度
圖9 目標車減速場景
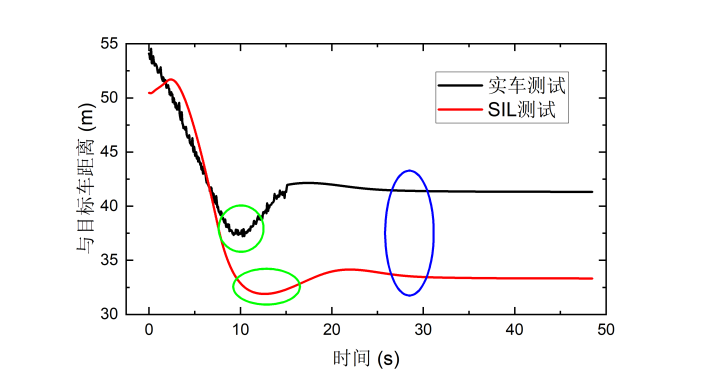
3.2.2 高速工況(1)目標車加速場景 初始條件:=60km/h,=60km/h,=50m。目標車以=0.5~1m/s2加速至100km/h后勻速行駛,主車穩定行駛后試驗結束,結果如圖10所示。
(a)動態跟車距離
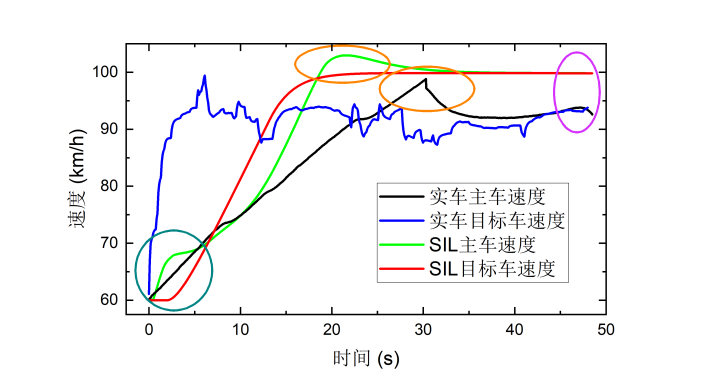
(b)主車與目標車速度
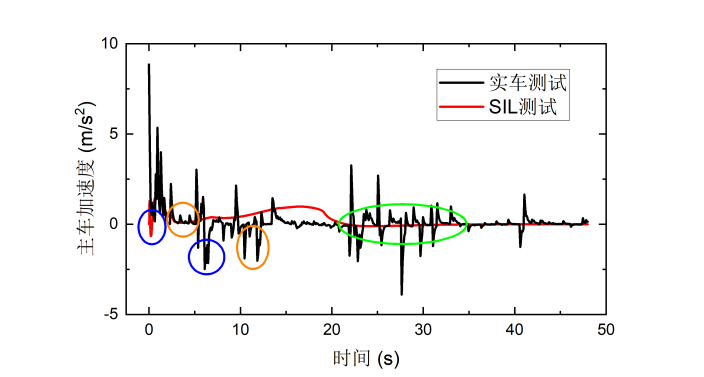
(c)主車加速度
圖10 目標車加速場景
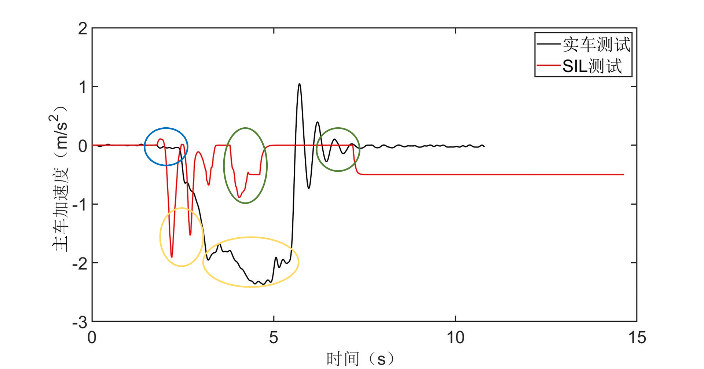
(2)目標車減速場景 初始條件:=100km/h;=100km/h;=50m。目標車以=100km/h勻速行駛,主車穩定跟隨后,目標車以=-2m/s2減速至60km/h后勻速行駛,主車穩定行駛后試驗結束,結果如圖11所示。
(a)動態跟車距離
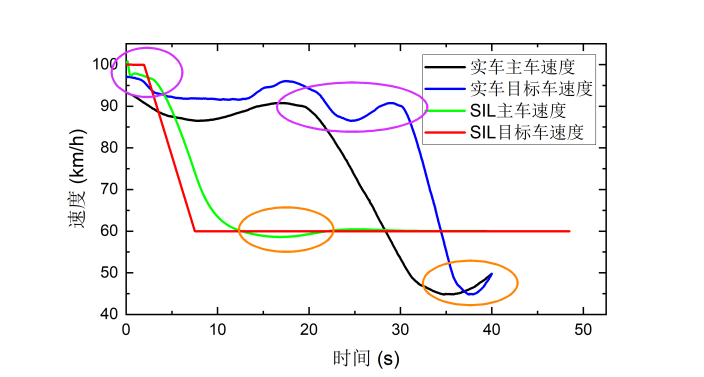
(b)主車與目標車速度
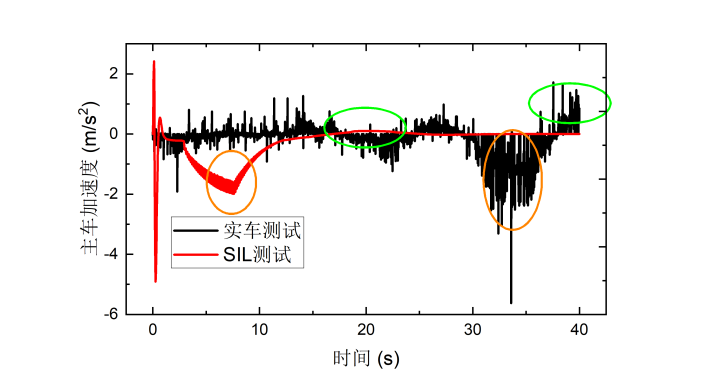
(c)主車加速度
圖11 目標車減速場景
3.3測試評估
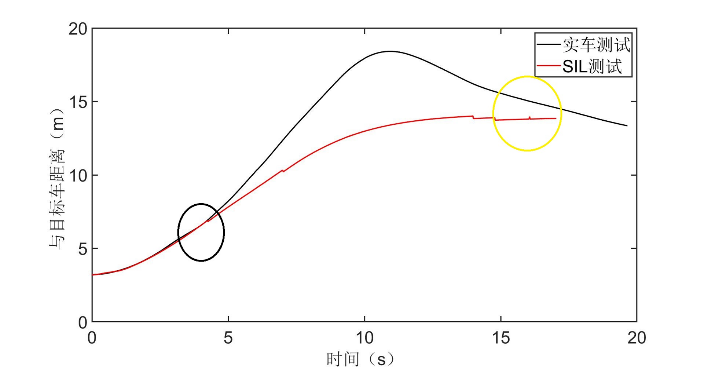
3.3.1 測試可信度評估在3.2中四個試驗場景的測試結果對比中,針對跟車距離、速度、加速度時間曲線,通過觀察分析運動趨勢、拐點、數據震蕩趨勢等數據觀察點(同色圓圈標記處),分析表明:仿真和實車測試數據趨勢表現一致,由此可判定,仿真測試在功能邏輯測試方面的測試結果具備較高可信度。
由于測試過程中,受實車動力總成響應慢于仿真模型、動力學模型標定差異、加減速時模型的表現差異等因素影響,觀察時應充分考慮實車與仿真的表現差異,對數據進行平移、拉伸等處理后再進行對比觀察。
3.3.2 模擬仿真測試評估
以圖4中No.2跟隨前車行駛場景為例,測試車型選用紅旗E-HS9。初始條件:=80km/h,≥200m,1.6m≤1.85m,目標車靜止(=0km/h)。
通過采用有效的泛化算法對測試場景進行針對性泛化,確保測試的場景覆蓋度。為簡化分析過程,在交通擁堵工況下,僅對主車速度在6~80km/h范圍內,進行2km/h增量的單參數泛化,對其減速控制功能進行高密度測試,結果如圖12所示。圖中顏色越深表示場景測試中的最小車間距越小,風險相對更高,在后續實車測試中可參考該分布圖進行場景參數選取。
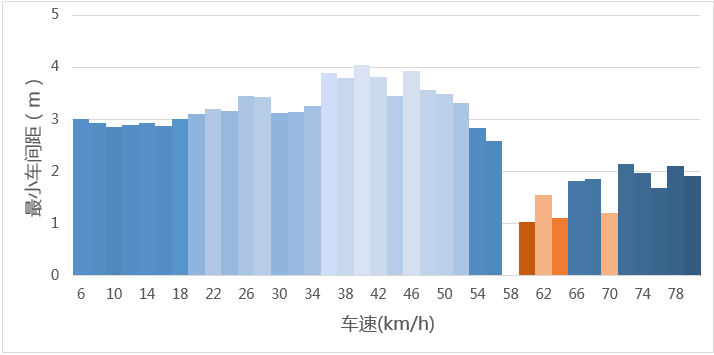
圖12 目標車減速場景
其中,測試結果顯示,在車速58km/h時發生了碰撞。經分析發現,發生該碰撞的原因是,在緊急制動模塊(最大剎停速度為60km/h)的速度邊界時,由緊急制動模塊的減速作用切換至單車道自動駕駛模塊減速,緊急制動模塊的減速請求退出過早,而單車道自動駕駛模塊減速請求尚未介入,進而導致了碰撞。
4
結語
本文從第三方角度出發,基于智能網聯汽車“三支柱”安全測試評估方法研究,提出一套基于場景的模擬仿真測試評估方法,分別從模擬仿真測試環境框架、測試場景集構建、測試可信度驗證與評估等方面進行研究,梳理形成了模擬仿真測試與評估流程,并在特定應用場景下開展初步實踐。隨著自動駕駛技術的迭代更新,以及模擬仿真測試技術的持續改進,針對智能網聯汽車的模擬仿真測試評估方法也需要不斷更新完善,以更好地適應產業發展和行業管理需要。參考文獻
[1] Ethics Commission. Automated and Connected Driving [R]. Germany:Ethics Commission,2017.
[2] RAND. Autonomous Vehicle Technology: A Guide for Policymakers [R]. United States:RAND,2014.
[3] OICA. Future Certification of Automated/Autonomous Driving Systems [R]. French:OICA,2019.
[4]劉法旺,曹建永,張志強等. 基于場景的智能網聯汽車“三支柱”安全測試評估方法研究 [J]. 汽車工程學報,2022,12(5).
LIUFawang,CAOJianyong,ZHANGZhiqiang,etal. A Scenario-Based “Three-Pillar” Safety Testing and Assessment Method for Intelligent and Connected Vehicles [J]. Chinese Journal of Automotive Engineering,2022,12(5).(inChinese)
[5]朱冰,張培興,趙健等.基于場景的自動駕駛汽車虛擬測試研究進展 [J]. 中國公路學報,2019,32(6).
ZHU Bing, ZHANG Peixing, ZHAO Jian, et al. Review of Scenario-based Virtual Validation Methods for Automated Vehicles [J]. China Journal of Highway and Transport,2019,32(6). (inChinese)
[6]KIROVSKII O. Determination of Validation Testing Scenarios for an ADAS Functionality: Case Study[J]. SAE Paper,2019.
[7] DAVISION A J,REID I D, MOLTON N D, et al. MonoSLAM:Real-time Single Camera SLAM[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2007,29(6).
[8] GUO J, DENG W W, ZHANG S M, et al. A Novel Method of Radar Modeling for Vehicle Intelligence [J]. SAE Paper,2016.
[9] Economic Commission for Europe. Uniform provisions concerning the approval of vehicles with regard to Automated Lane Keeping Systems [Z]. United Nations:Economic Commission for Europe,2021.
[10] Economic Commission for Europe. Proposal for the 01 series of amendments to UN Regulation No. 157 (Automated Lane Keeping Systems) [Z]. United Nations:Economic Commission for Europe,2022.
[11] 國土交通省. TRIAS 48-R157-01自動車線維持システム試験(協定規則第157號)[Z]. 日本:國土交通省,2020.
Ministry of Land and Communications. TRIAS 48-R157-01 Automated Lane Keeping Systems Test (Agreement No.157) [Z]. Japan:Ministry of Land and Communications,2020.(in Japanese)
[12] Economic Commission for Europe. New Assessment/Test Method for Automated Driving (NATM) Guidelines for Validating Automated Driving (ADS) Safety [Z]. United Nations:Economic Commission for Europe,2022.
[13] European Commission. Draft Commission Implementing Regulation:Laying Down Rules for the Application of Regulation (EU) 2019/2144 of the European Parliament and of the Council as Regards Uniform Procedures and Technical Specifications for the Type-Approval of Motor Vehicles with Regard to their Automated Driving System (ADS) (G/TBT/N/EU/884) [Z]. Europe:European Commission,2022.
[14] ISO 11010-1: 2022. Passenger cars — Simulation model classification — Part 1: Vehicle dynamics [S]. Switzerland:International Organization for Standardization,2021.
[15] ISO 22140: 2021. Passenger cars — Validation of vehicle dynamics simulation — Lateral transient response test methods [S]. Switzerland:International Organization for Standardization,2021.
[16] SCH?NER H P. Simulation in Development and Testing of Autonomous Vehicles [J]. Germany:18th Internationales Stuttgarter Symposium,2018.
[17] 劉法旺,徐曉慶,陳貞等. 搭載自動駕駛功能的智能網聯汽車安全測試與評估方法研究 [J]. 汽車工程學報,2022,12(3).
LIUFawang,XUXiaoqing,CHENZhen,etal. Research on Safety Test and Assessment Method of Intelligent and Connected Vehicle with Autonomous Driving Function [J]. Chinese Journal of Automotive Engineering,2022,12(3).(inChinese)
[18] National Highway Traffic Safety Administration. A Framework for Automated Driving System Testable Cases and Scenarios [R]. United States:National Highway Traffic Safety Administration,2018.
[19] BSI PAS 1883: 2020. Operational Design Domain (ODD) taxonomy for an automated driving system (ADS) – Specification. United Kingdom:The British Standards Institution,2020.
[20] WEISSENSTEINERP, STETTINGERG, RUMETSHOFERJ, et al. Virtual Validation of an Automated Lane-Keeping System with an Extended Operational Design Domain.Electronics [J]. Electronics,2022,11(1).
[21] Mcity. Driving Progress: 2019 Annual Report [R]. United States:Mcity,2019.
[22] SAKURA. Towards the Harmonization of Safety Assessment Methods of Automated Driving [R]. Japan:SAKURA,2021.
[23] Department for Transport. Automated Vehicles in the UK [R]. United Kingdom:Department for Transport,2019.
[24] 陳貞. 智能網聯汽車場景數據服務平臺 [R]. 北京:世界智能網聯汽車大會,2021.
CHEN Zhen. Intelligent and Connected Vehicle Scenario Data Service Platform [R]. Beijing:World Intelligent Connected Vehicles Conference,2021. (in Chinese)
[25] International Alliance for Mobility Testing and Standardization. International Alliance for Mobility Testing and StandardizationTM Best Practice: A Comprehensive Approach for the Validation of Virtual Testing Toolchains [Z]. United States:International Alliance for Mobility Testing and Standardization,2021.
[26] DONà R, CIUFFOB. Virtual Testing of Automated Driving Systems. A Survey on Validation Methods [J].IEEE Access,2022(10).
[27] GB 34590—2017. 道路車輛 功能安全 [S]. 北京:全國汽車標準化技術委員會,2017.
GB 34590—2017. Road Vehicles—Functional safety [S]. Beijing:National Technical Committee of Auto Standardization,2017.(in Chinese)
[28] RIEDMAIERS, DANQUAHB, SCHICKB, et al. Unified Framework and Survey for Model Verification, Validation and Uncertainty Quantification [J]. Archives of Computational Methods in Engineering,2021(1).
[29] Japan Automobile Manufacturers Association, Inc. Automated Driving Safety Evaluation Framework Ver. 2.0-Guidelines for Safety Evaluation of Automated Driving Technology [Z]. Japan:Japan Automobile Manufacturers Association, Inc. ,2021.
[30] RIEDMAIER S, SCHNEIDER D, WATZENIG D, et al. Model Validation and Scenario Selection for Virtual-Based Homologation of Automated Vehicles [J]. Applied Sciences,2021:11(1).
[31] European Commission. Guidelines on the Exemption Procedure for the EU Approval of Automated Vehicles [Z]. European:European Commission,2019.
[32] MYERS R, SAIGOL Z. Pass-Fail Criteria for Scenario-Based Testing of Automated Driving Systems [J]. ArXiv:Robotics,2020.
[33] SGS-TüV Saar GmbH. Beijing Saimo Technology Co.,Ltd. Sim Pro Simulation Tool Chain (Certificate No. FS/71/220/21/0692)[Z]. Germany:SGS-TüV Saar GmbH,2022.
本文已于2023年3月發布于汽車工程學報。
作者:劉法旺1,何豐2,周時瑩3,梁偉強4,何博2,陳貞5,徐曉慶6,曹建永7
(1. 工業和信息化部 裝備工業發展中心;2. 北京賽目科技有限公司;3. 中國第一汽車集團有限公司;4. 廣州汽車集團股份有限公司;5. 北京鏑石數據科技有限公司;6. 中國汽車工程研究院股份有限公司;7. 上海機動車檢測認證技術研究中心有限公司)
掃描二維碼
關注賽目科技
 ?
?專注智能網聯汽車
測試丨驗證丨評價研究
原文標題:基于場景的智能網聯汽車模擬仿真測試評估方法與實踐
文章出處:【微信公眾號:賽目科技】歡迎添加關注!文章轉載請注明出處。
-
賽目科技
+關注
關注
0文章
41瀏覽量
792
原文標題:基于場景的智能網聯汽車模擬仿真測試評估方法與實踐
文章出處:【微信號:gh_c85a8e3c0f2a,微信公眾號:賽目科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

智能座艙HIL仿真測試解決方案

智能駕駛HIL仿真測試解決方案

面向教學科研智能網聯汽車仿真測試實驗室

知行科技《基于仿真方法量化AEB系統功能安全閾值》入選智能網聯汽車功能安全典型案例

汽車雷達回波發生器的技術原理和應用場景

中國智能網聯汽車產業取得顯著成效
設計仿真 | 基于VTD的智能大燈仿真測試方案
車輛動力學仿真模型的可信度評估方法






 工商網監
工商網監
評論