") ch347連接mpu6050模塊的方法
ch347連接mpu6050模塊的方法
在上一篇文章 詳解 I2C的末尾,有這樣一張波形圖:

實(shí)例2
這個對應(yīng)的就是常見的從設(shè)備寄存器讀數(shù)據(jù)的波形,只是在寫數(shù)據(jù)時多了一個字節(jié)。
通用的從 I2C 設(shè)備讀寄存器數(shù)據(jù)的模式應(yīng)該是這樣的:
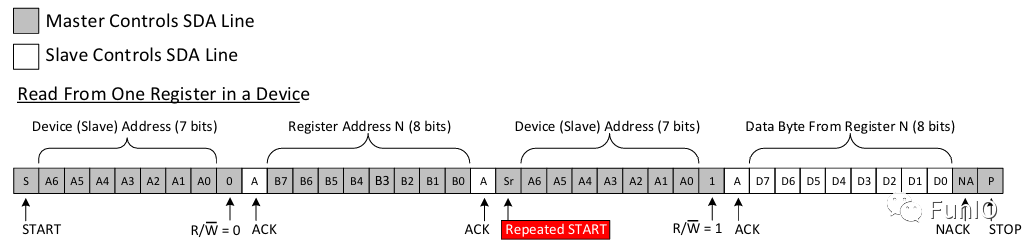
從從設(shè)備寄存器讀數(shù)據(jù)示例
在mpu6050 數(shù)據(jù)表 中的9.3 I2C Communications Protocol章節(jié)說明了 mpu6050 的 i2c 接口協(xié)議,符合通用模式。
mpu6050 單字節(jié)寫和加速寫序列如下:
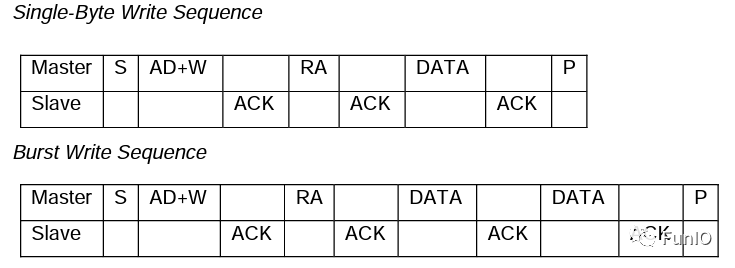
mpu6050單字節(jié)寫和加速寫
mpu6050 單字節(jié)讀和加速讀序列如下:
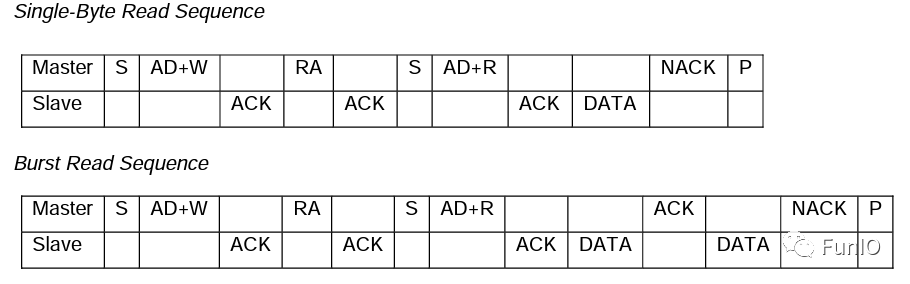
mpu6050單字節(jié)讀和加速讀
上面的加速寫和加速讀都是以 2 個數(shù)據(jù)字節(jié)為例的。
從實(shí)例 2 的波形圖可以看出,啟動傳輸后,寫了0x12``0x13``0x143 個字節(jié),這 3 個字節(jié)后都是NACK,然后是重復(fù)起始信號,跟著剛才地址字節(jié)0x12+1即0x13,I2C 從寫轉(zhuǎn)換到讀,然后開始讀數(shù)據(jù)字節(jié)。
對應(yīng)代碼為:
result = ch347_driver.i2c_set(device_index, 1)
if result:
print("Success to set I2C speed.")
else:
print("Failed to set I2C speed.")
result = ch347_driver.i2c_set_delay_ms(device_index, 1)
if result:
print("Success to set I2C delay.")
else:
print("Failed to set I2C delay.")
result = ch347_driver.stream_i2c(device_index, b'x12x13x14', 8)
if result:
print("Success!")
else:
print("Failed!")
將上面這段代碼稍加修改:
result = ch347_driver.i2c_set(device_index, 1)
if result:
print("Success to set I2C speed.")
else:
print("Failed to set I2C speed.")
result = ch347_driver.i2c_set_delay_ms(device_index, 1)
if result:
print("Success to set I2C delay.")
else:
print("Failed to set I2C delay.")
result = ch347_driver.stream_i2c(device_index, b'xd0x75', 1)
if result:
print("Success! result:", result.hex())
else:
print("Failed!")
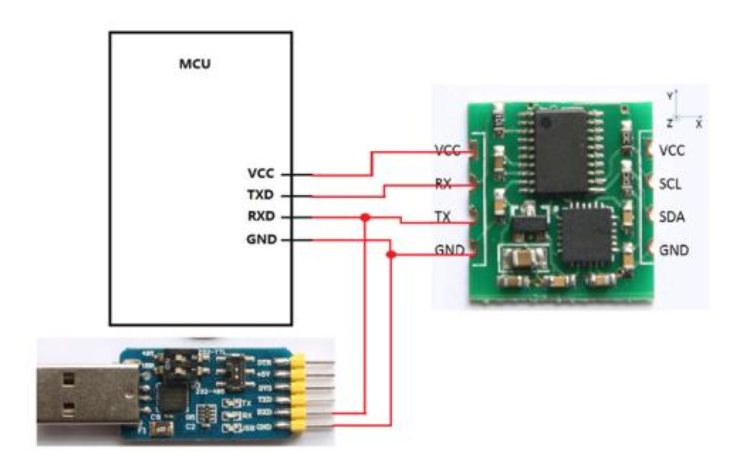
mpu6050 模塊的地址是0b1101000(AD0 = 0),左移 1 位得到設(shè)備寫地址0xd0,讀數(shù)據(jù)時的讀地址 ch347 會自動產(chǎn)生,波形如下:

讀寄存器0x75
還沒有連接 mpu6050 模塊,所以沒有數(shù)據(jù)返回。現(xiàn)在把 mpu6050 模塊 i2c 接口連接到 ch347 模塊上,運(yùn)行程序,結(jié)果為:
? python test.py
Successfully opened device index: 0
Device Information:
iIndex: 0
DevicePath: ?USB#VID_1A86&PID_55DB&MI_02#7&2887B016&0&0002#{5446F048-98B4-4EF0-96E8-27994BAC0D00}
UsbClass: 0
FuncType: 1
DeviceID: USBVID_1A86&PID_55DB&MI_02#7&2887B016&0&0002#
ChipMode: 1
DevHandle: 912
BulkOutEndpMaxSize: 512
BulkInEndpMaxSize: 512
UsbSpeedType: 1
CH347IfNum: 0
DataUpEndp: 6
DataDnEndp: 6
ProductString:
ManufacturerString:
WriteTimeout: 500
ReadTimeout: 500
FuncDescStr: USB2.0 To SPI&IIC
FirewareVer: 64
ch347.mDeviceInforS object at 0x000002465A1E63C0 >
Version Information:
Driver Version: 35
DLL Version: 34
Device Version: 64
Chip Type: 1
Success to set I2C speed.
Success to set I2C delay.
Success! result: 68
Successfully closed device index: 0
可以看到返回了數(shù)據(jù)0x68,0x75是'WHO_AM_I'寄存器,默認(rèn)值為0x68。
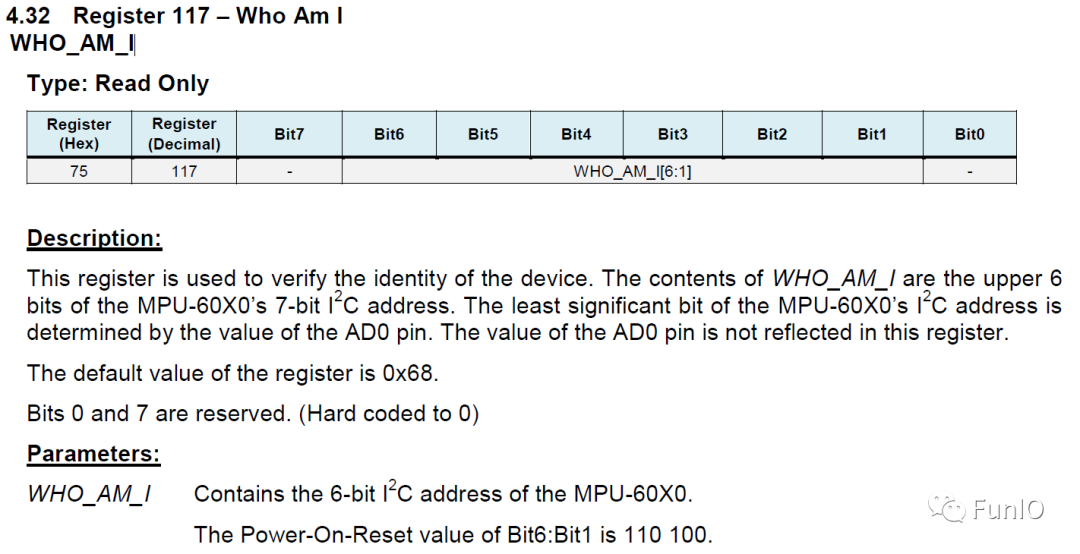
'WHO_AM_I'寄存器
完整代碼:
import ch347
dll_path = "ch347dlla64.dll" # Replace with the actual path to the DLL
device_index = 0 # Set the device index according to your requirements
ch347_driver = ch347.CH347Driver(dll_path)
result = ch347_driver.open_device(device_index)
if result:
print(f"Successfully opened device index: {device_index}")
else:
print(f"Failed to close device index: {device_index}")
result, device_info = ch347_driver.get_device_info(device_index)
if result:
print("Device Information:")
print(f"iIndex: {device_info.iIndex}")
print(f"DevicePath: {device_info.DevicePath.decode()}")
print(f"UsbClass: {device_info.UsbClass}")
print(f"FuncType: {device_info.FuncType}")
print(f"DeviceID: {device_info.DeviceID.decode()}")
print(f"ChipMode: {device_info.ChipMode}")
print(f"DevHandle: {device_info.DevHandle}")
print(f"BulkOutEndpMaxSize: {device_info.BulkOutEndpMaxSize}")
print(f"BulkInEndpMaxSize: {device_info.BulkInEndpMaxSize}")
print(f"UsbSpeedType: {device_info.UsbSpeedType}")
print(f"CH347IfNum: {device_info.CH347IfNum}")
print(f"DataUpEndp: {device_info.DataUpEndp}")
print(f"DataDnEndp: {device_info.DataDnEndp}")
print(f"ProductString: {device_info.ProductString.decode()}")
print(f"ManufacturerString: {device_info.ManufacturerString.decode()}")
print(f"WriteTimeout: {device_info.WriteTimeout}")
print(f"ReadTimeout: {device_info.ReadTimeout}")
print(f"FuncDescStr: {device_info.FuncDescStr.decode()}")
print(f"FirewareVer: {device_info.FirewareVer}")
print(repr(device_info))
else:
print("Failed to get device information.")
result, driver_ver, dll_ver, device_ver, chip_type = ch347_driver.get_version(device_index)
if result:
print("Version Information:")
print(f"Driver Version: {driver_ver}")
print(f"DLL Version: {dll_ver}")
print(f"Device Version: {device_ver}")
print(f"Chip Type: {chip_type}")
else:
print("Failed to get version information.")
result = ch347_driver.i2c_set(device_index, 1)
if result:
print("Success to set I2C speed.")
else:
print("Failed to set I2C speed.")
result = ch347_driver.i2c_set_delay_ms(device_index, 1)
if result:
print("Success to set I2C delay.")
else:
print("Failed to set I2C delay.")
result = ch347_driver.stream_i2c(device_index, b'xd0x75', 1)
if result:
print("Success! result:", result.hex())
else:
print("Failed!")
# Example usage of CH347CloseDevice
result = ch347_driver.close_device(device_index)
if result:
print(f"Successfully closed device index: {device_index}")
else:
print(f"Failed to close device index: {device_index}")
-
模塊
+關(guān)注
關(guān)注
7文章
2730瀏覽量
47649 -
寄存器
+關(guān)注
關(guān)注
31文章
5363瀏覽量
120913 -
I2C
+關(guān)注
關(guān)注
28文章
1495瀏覽量
124231 -
MPU6050
+關(guān)注
關(guān)注
39文章
307瀏覽量
71556
發(fā)布評論請先 登錄
相關(guān)推薦
MPU6050連接失敗錯誤
MPU6050模塊
使用esp32連接mpu6050讀取角度數(shù)據(jù)
Arduino與MPU6050的通信
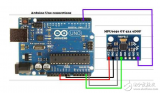
mpu6050怎么與單片機(jī)連接
Arduino與MPU6050連接的代碼詳細(xì)資料免費(fèi)下載
怎樣將Arduino與MPU6050連接
MPU6050簡介

mpu6050使用 基于esp32
GY-521模塊--MPU6050芯片基本學(xué)習(xí)(一)
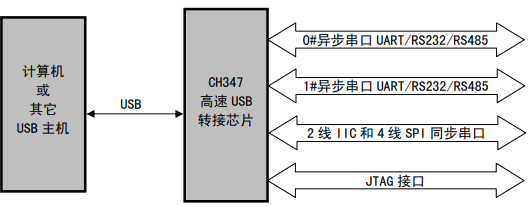
高速USB轉(zhuǎn)接芯片CH347技術(shù)手冊
高速USB轉(zhuǎn)接芯片 CH347





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論