 軟著陸技術在半導體和3C組裝設備中的應用
軟著陸技術在半導體和3C組裝設備中的應用
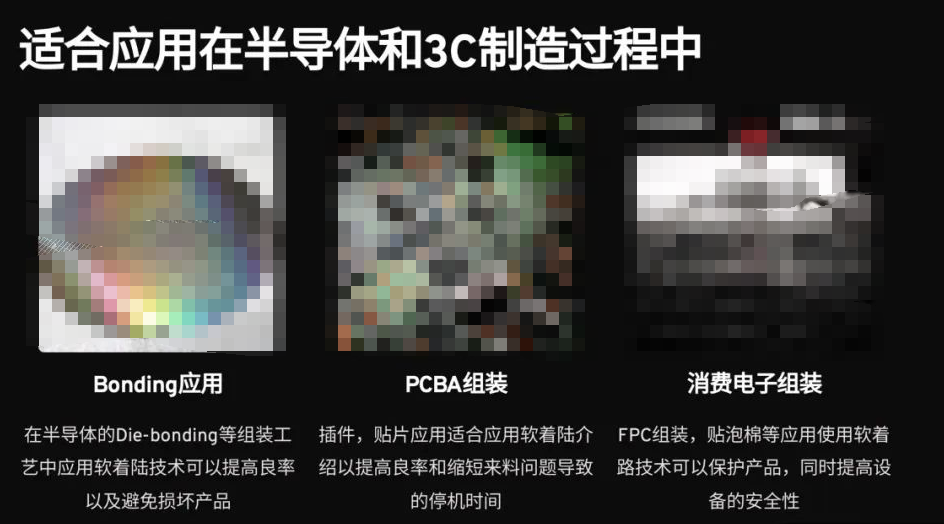
軟著陸技術在半導體和3C的組裝設備中被廣泛的應用。
目前常見的軟著路一般通過特定的驅控實現,這是一種比較直接的實現方式,特定的軟著陸邏輯運行在伺服中,因為伺服驅動器直接管理著電流和速度環,理論上可以實現最高性能的軟著陸應用。
然而,不同的設備往往需要特定的軟著陸邏輯,甚至需要關聯其他的信號和邏輯。
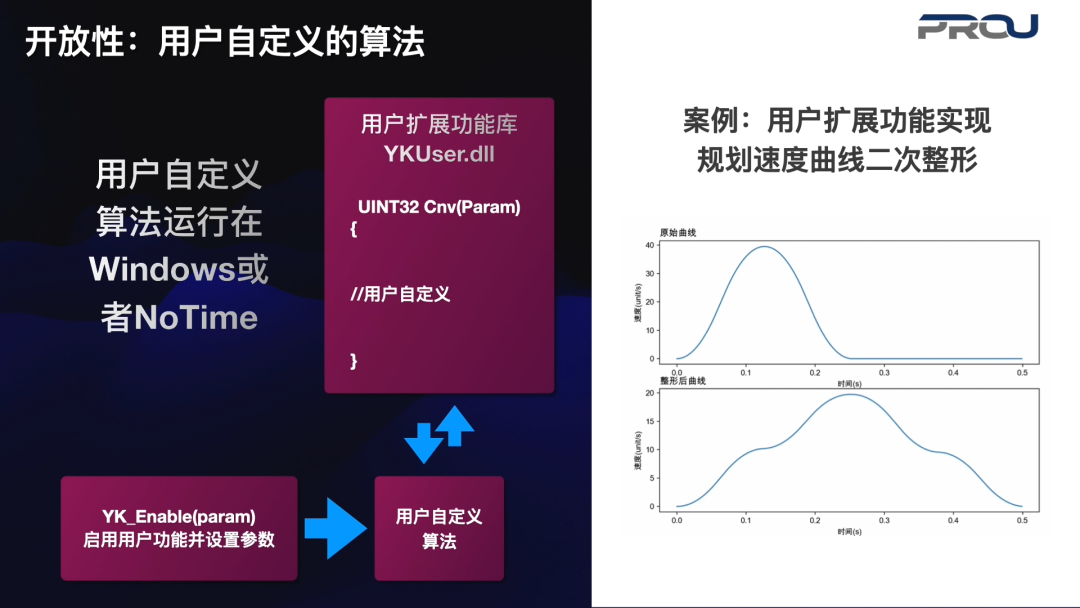
ProCon P&P模塊的軟著陸功能,通過與伺服驅動器的高性能交互,以及NoTime技術,實現了高性能且用戶可以自定義邏輯的柔性軟著陸應用。
場景一
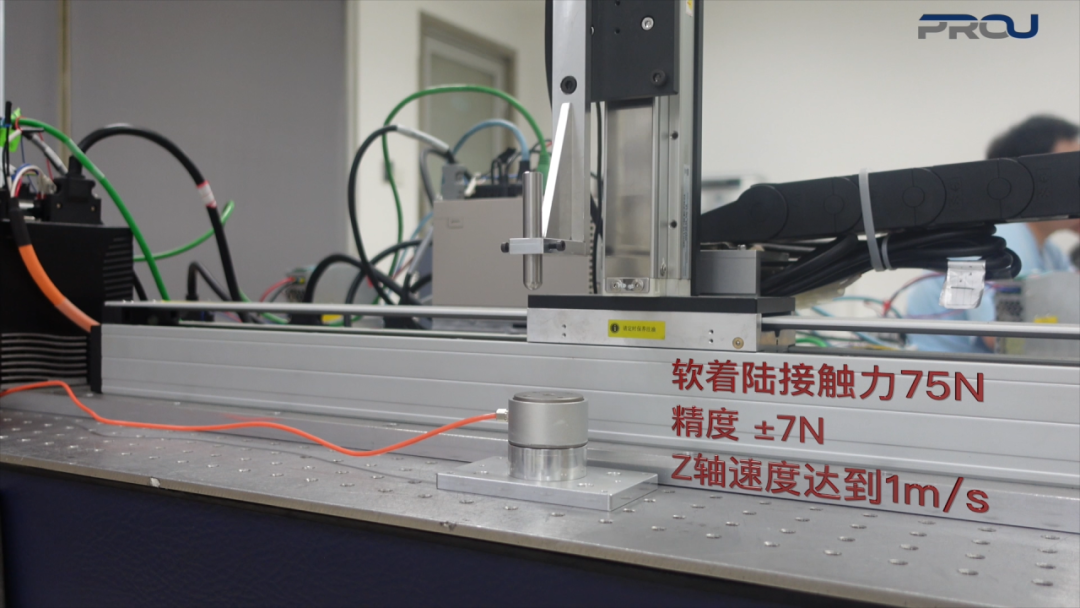
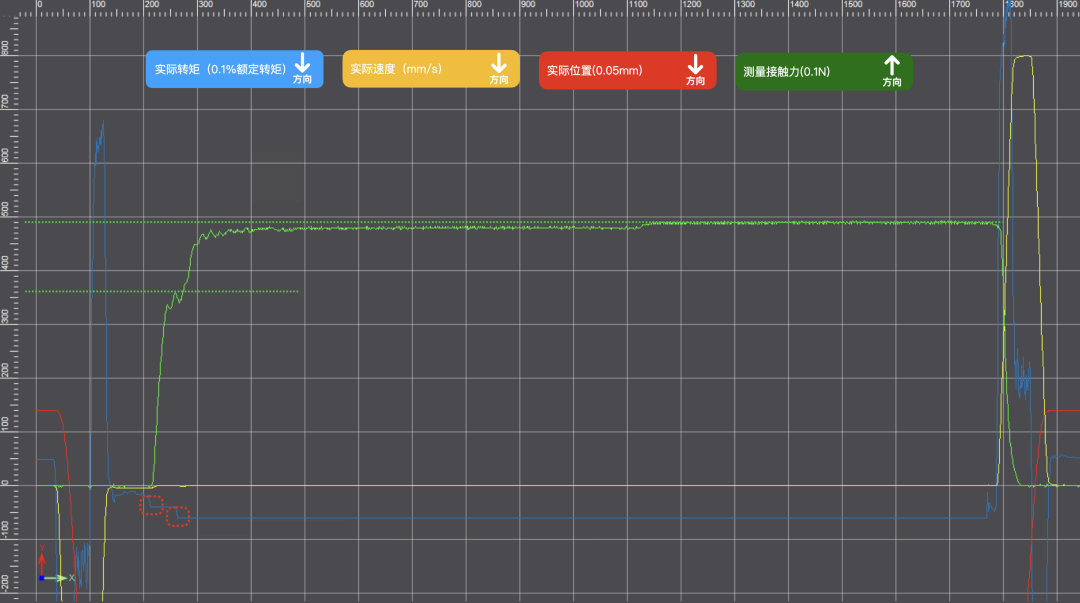
這是一個半導體或3C裝備的組裝場景,要求軟著陸的接觸力為75N,精度為±10%,Z軸最高速度達到1m/s。
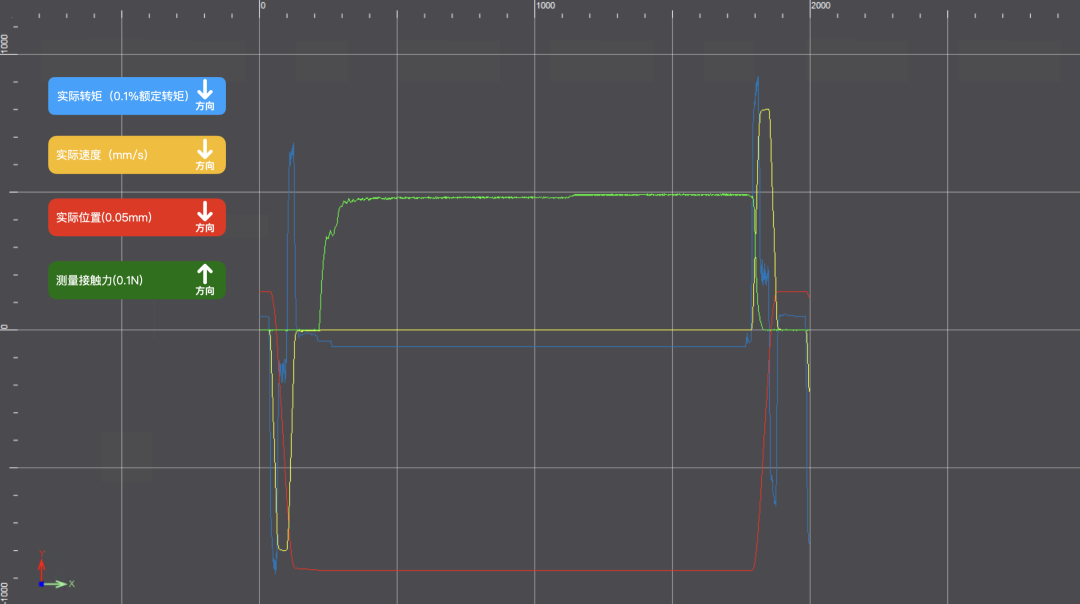
通過ProEN的示波器功能,我們分析圖中Z軸伺服的實際轉矩,實際速度,實際位置以及外置用于測試的傳感器的數據。
Z軸的起始位置為+7mm,由于軟著陸運動是往下運動,也就是負方向運動,所以看到著陸的過程中,包括實際轉矩,實際速度,實際位置的曲線都是朝負方向變化。
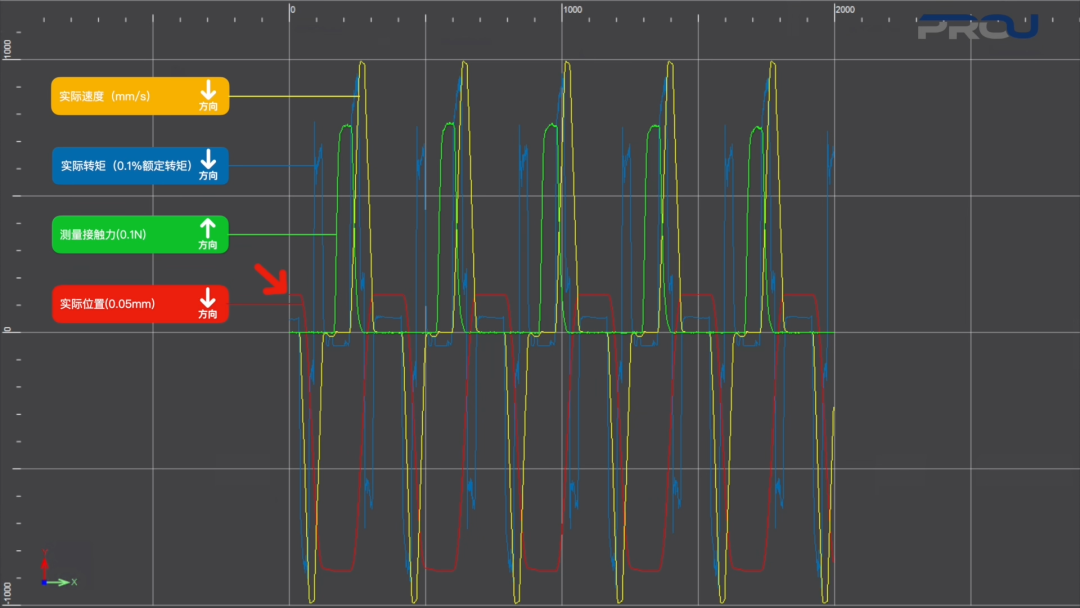
只有綠色的力傳感器的曲線是正向的,傳感器只測量,并不參與控制。分析傳感器采集的數據,可以看到力控精度可以控制在±1N。
?
與傳統專用軟著陸裝置不同,用戶使用YKCAT2可以方便地加入設備需要的特定邏輯或算法。
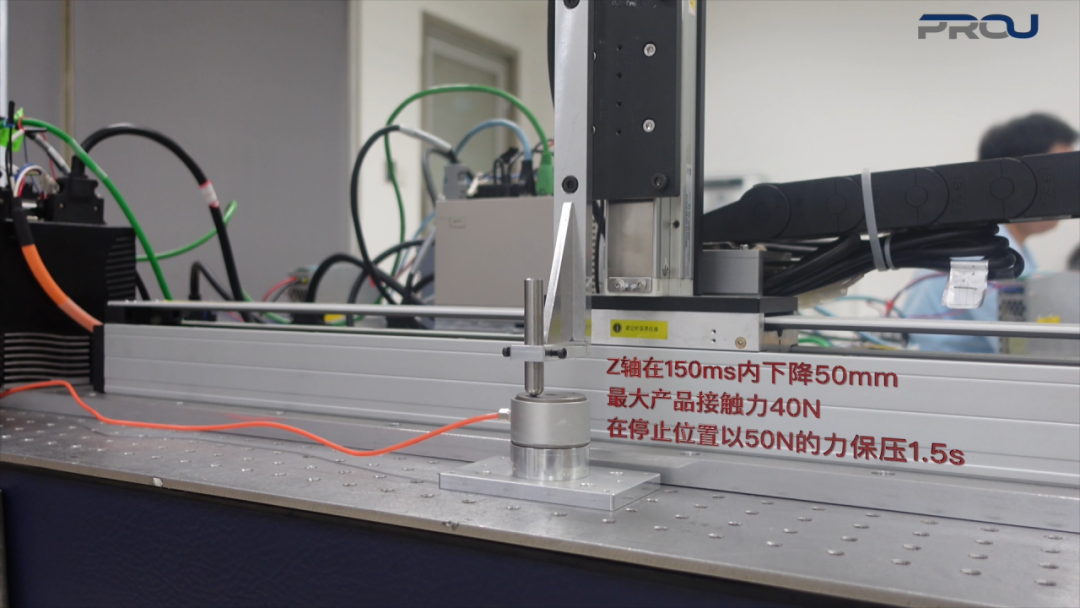
場景二
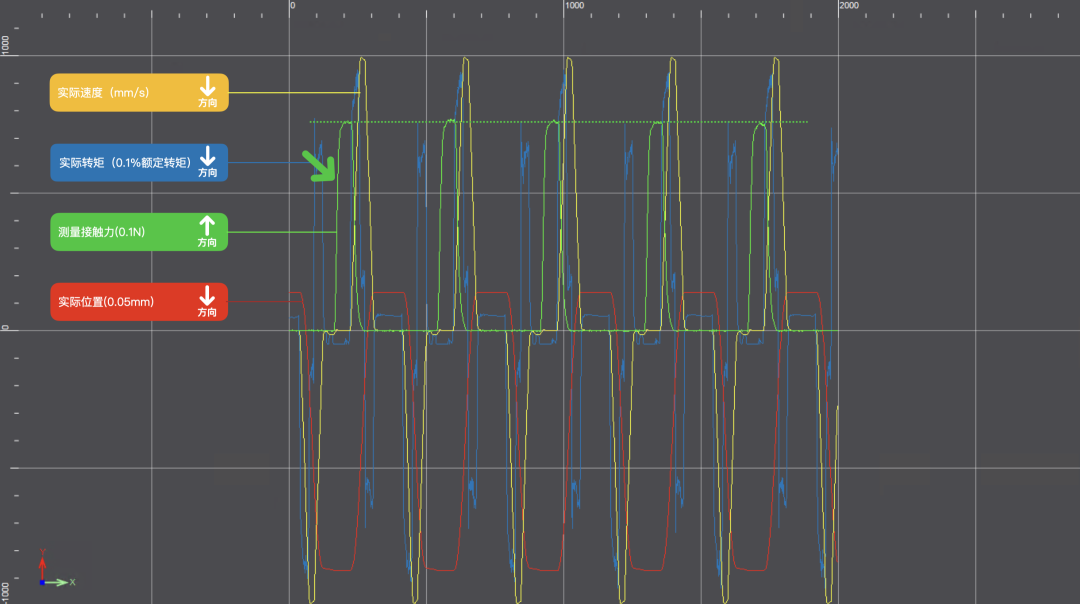
在這個場景中,Z軸在150ms內下降50mm,最大產品接觸力40N。之后在停止位置以50N的力保壓1.5s,如視頻:
放大其中一個周期,第一個紅色框內實際轉矩曲線開始直線下降時,意味著此時軸接觸了產品,軟著陸完成。對照測量曲線,接觸力為33~37N(傳感器和模擬量模塊有一定的滯后)。
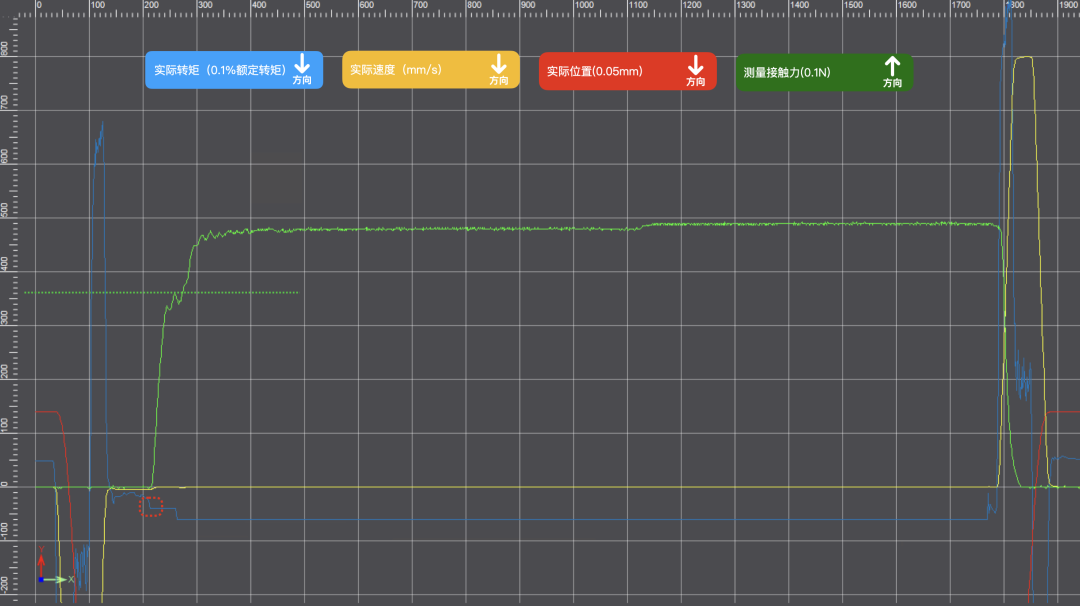
第二個紅色框為Z軸輸出保壓力,從綠色傳感器曲線可以看到保壓力值為50N,保壓時間為1.5s。
通過NoTime 125μs高精度線程,用戶設定的邏輯/算法在實時系統中實時被執行,實現自定義的力控應用。
通過這兩個場景,我們可以了解YKCAT2軟著陸是如何實現的:
最后,伺服驅動器滿足以下技術點即可適配YKCAT HP&P模塊的軟著陸功能:
以上就是軟著陸的全部介紹內容了。
編輯:黃飛
-
傳感器
+關注
關注
2550文章
51035瀏覽量
753083 -
示波器
+關注
關注
113文章
6240瀏覽量
184799 -
模擬量
+關注
關注
5文章
491瀏覽量
25541 -
伺服驅動器
+關注
關注
22文章
481瀏覽量
31543
原文標題:ProCon HP&P模塊,實現柔性的“軟著陸”應用
文章出處:【微信號:伺服與運動控制,微信公眾號:伺服與運動控制】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
全球半導體產值再創新高,AOI設備需求熱度有望保持
2019上海國際3C電子制造及技術裝備展覽會
匯聚-2019中國上海國際3C電子制造及技術裝備展覽會
2019中國(北京)國際3C電子制造及技術設備展覽會
超聲波傳感應用于無人機著陸技術解析
信息技術設備產品如何辦理3C認證
基于月球探測器的重力轉彎軟著陸最優制導研究






 工商網監
工商網監
評論