 雷達回波模擬器的作用
雷達回波模擬器的作用
在許多先進的車輛設計中,幾個雷達單元位于車輛周圍,以提供完整的視野,并允許低距離到高距離的覆蓋范圍高達幾百米。
與此同時,半導體工業正迅速向多基地雷達方向發展,其天線陣由數十個發射和接收天線組成。一些制造商正在向全CMOS設計或混合信號SiGe架構遷移,以便將數字鏈集成到雷達芯片中。
因此,針對ADAS功能的雷達解決方案以及后來針對自主駕駛的雷達解決方案已經成為一種經濟高效、不可替代的解決方案。
此外,通常使用機器學習技術來促進傳感器融合決策過程,以便在街道上實時操控車輛。數字處理行業的幾位全球領先者正在努力實現高效處理器,以適應機器學習的需求,例如深度學習算法。一些處理器基于GPU體系結構、并行CPU,甚至基于具有直接傳感器接口的專用控制器單元。
雷達傳感器通過對觀測區回波信號的時延、多普勒頻移、到達角和幅度的估計來測量目標的距離、徑向速度、方位角和大小,在這些方面具有獨特的能力。一些現代雷達傳感器還可以估計仰角,下一代雷達應該提供仰角的真實測量值。
在復雜的多目標環境(如交叉口場景)中同時確定這些參數對雷達設計提出了技術挑戰。為了實現這一目標,雷達需要提供高分辨率數據,這一事實鼓勵許多貢獻者報告成像雷達或尋求合成孔徑方法來增強雷達數據。所有這些要求都對每個雷達單元或傳感器系統的驗證和確認提出了嚴格的要求,以確保預期的性能。
由于雷達的復雜性和智能化程度越來越高,利用雷達信號質量的直接評價來判斷其在街上的性能是不夠的。除了對其信號相位噪聲、多普勒分辨率、相位再現性、溫度穩定性、輸出功率、接收機噪聲系數、調頻斜率和線性度等進行常規測試外,對整機功能的測試也變得越來越必要。
在車輛內部集成雷達所造成的影響,例如外殼和天線罩(標志或保險杠)的內部反射,增加了這種復雜性,降低了性能。因此,功能測試正成為許多高檔汽車制造商批準的強制性步驟。
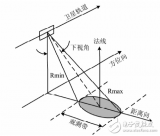
最簡單的功能測試依賴于安裝在雷達前方特定參考距離的角反射器。為了獲得穩定且可重復的試驗環境,通常需要一個大型暗室(如R&S ATS1000)來抑制任何未知的環境條件。雖然這聽起來很簡單,但這種裝置實際上只能在給定的信噪比水平下測試靜止理想目標的檢測閾值。
無法測試多普勒分辨率和目標的動態行為,例如驗證跟蹤和分類過程。因此,必須有一個更真實的設置來模擬現實生活中的情況。還必須包括來自其他移動車輛雷達來模擬外來信號,以確保干擾緩解。
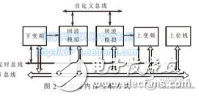
模擬器實現方法
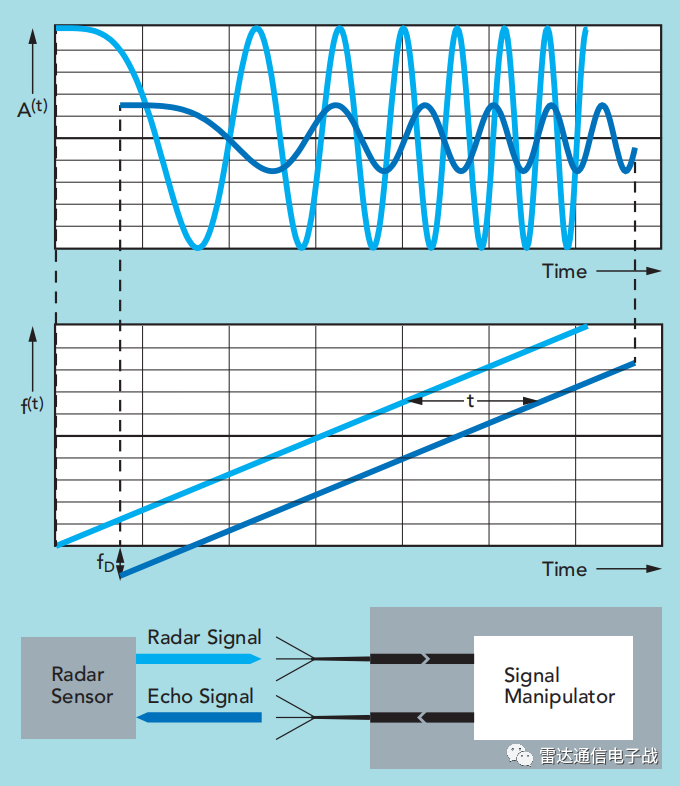
典型的實現方法是,接收雷達射頻信號,并將其下變頻為中頻,在中頻中引入時延(距離)、徑向速度(多普勒頻移)和衰減(RCS)。
然后,將被調制的信號相干地向上變換到射頻并重新傳輸到被測雷達。被測雷達接收并處理它最初發送的信號的調制,并報告檢測到的距離、多普勒頻移和RCS。
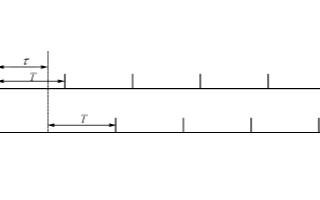
模擬和數字雷達回波發生器都遵循相同的概念,但它們對雷達回波信號的操作可能不同。雖然模擬回波模擬器使用延遲線,例如波導、同軸或光纖,但為了將信號延遲到固定距離,數字解決方案在通過可編程時間延遲動態改變范圍方面也具有更大的靈活性。
然而,數字解決方案中的一個關鍵參數是相關信號處理引起的延遲。將雷達波形從模擬域轉換到數字域需要至少幾個數字時鐘周期。由于雷達信號以光速傳播,每納秒的延遲將對應大約15厘米的距離,這是無法補償的。雖然模擬雷達回波發生器用于驗證測試和生產線,但數字發生器更多地用于研發,有可能測試更復雜的雷達場景。
單雷達回波發生器可用于驗證目標簡單徑向運動的跟蹤算法。例如,在許多自動巡航控制(ACC)方案中都會出現這種情況。為了測試諸如變道輔助等功能,必須改變目標方位角,因此需要通過模擬器前端模擬到達角。
測試
由于高度自動化駕駛帶來的巨大需求,汽車雷達的開發周期正在縮短。雷達性能、功能和應用都在不斷提高。隨著應用程序數量的增加,應用程序和雷達傳感器必須進行最終測試的場景也相應增加。
在一個功能被確認之前,需要行駛一百萬公里的測試里程。考慮到每年都有新的傳感器和新車,要跟上駕駛測試是不可能的。此外,使用“舊傳感器”數據訓練的決策網絡可能不再有效,因為訓練數據和分類算法依賴于傳感器本身。
這意味著,一個新的傳感器需要一個新的訓練和測試數據集,這就意味著另一個百萬公里測試。由于未來生產的汽車將是高度自動化和完全自主的,我們需要找到方法來減少駕駛測試所需的公里數。對于舊車,車輛在環路(VeHIL)試驗臺是可用的。但對于依賴雷達傳感器信息所生產的新型汽車,這些試驗臺必須用額外的試驗設備進行更新。
在許多情況下,試驗臺上的汽車在雷達被控制之前甚至不會加速。雷達回波發生器和通過電子控制單元(ECU)接口模擬雷達傳感器回波是一個很好的起點。雖然雷達傳感器的軟件仿真可以很全面,滿足很多需求,但并不能真正復制雷達的真實行為。
回波模擬器
雷達回波模擬器測試雷達,模擬距離、多普勒和方位角。然而,目前雷達回波產生器無法對傳感器在正常環境中檢測到的許多方位角和仰角產生真實的場景。這是因為雷達回波發生器的發射和接收天線數量有限,因此無法模擬被測雷達傳感器角度方向的變化。如前所述,這足以進行簡單的功能測試或性能測試,如精度、檢測閾值或分辨率,但絕對不適用于高級駕駛員輔助系統和自動車輛的功能測試。
雷達回波模擬器可能需要數百個接收器和發射器來捕獲、操作和重新傳輸與典型雷達回波信號一樣真實的回波信號。除了角度限制,現在的雷達回波模擬器也不能模擬分布式目標。
行人并不是一個倒影。它們有多個反射點,軀干、腿和手臂有不同的速度。車輛不僅僅表現為一個單散射點,而是在距離和方位上都有分布的散射點,主要由一個多普勒分量組成。在從場景和功能角度測試跟蹤、分類和決策過程生成所需的真實雷達回波信號時,必須考慮所有這些要求。
下圖顯示了一個概念,其中雷達回波發生器由一個天線陣列安裝在屏幕后面。屏幕顯示支持駕駛員輔助系統的攝像頭傳感器的駕駛場景,例如高速公路場景。
一個完全電子控制的天線陣列,有數千個發射端和一個數字處理后端,可以用來模擬復雜目標及其機動的雷達傳感器。傳感器位于測量系統前,測量系統接收雷達發射信號,實時控制距離、多普勒、雷達散射截面(RCS),并將回波信號傳送到天線陣列內的特定天線,從而得到被測雷達的方位角和仰角。
這種模塊化方法的優點在于,回波信號的反射將與現實生活中一樣。在這個頻率范圍內,存在大型天線陣列,并且可以用于雷達測試,但目前還沒有商業雷達回波生成解決方案,可以從這樣的天線陣列生成復雜的點云目標。
隨著雷達傳感器數量的增加、不同的工作模式和傳感器功能的增加,測試自主車輛將變得更加復雜。為了應對這些挑戰,單發射天線和單接收天線的雷達回波發生器是一種很好的方法,但并不能完全滿足未來雷達傳感器和場景測試的需求。
與數字雷達回波發生器相結合的天線陣列,將能夠更實際地滿足測試雷達傳感器的需要。由于自主汽車的研發、待測場景、雷達傳感器及其與激光掃描儀和攝像頭等其他傳感器的融合仍在繼續,原始設備制造商、一級制造商和測試測量制造商必須攜手合作,為不斷增長的需求提供解決方案。
-
CMOS
+關注
關注
58文章
5710瀏覽量
235420 -
半導體
+關注
關注
334文章
27290瀏覽量
218093 -
雷達
+關注
關注
50文章
2930瀏覽量
117465 -
模擬器
+關注
關注
2文章
874瀏覽量
43208
原文標題:雷達回波模擬器的作用
文章出處:【微信號:雷達通信電子戰,微信公眾號:雷達通信電子戰】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
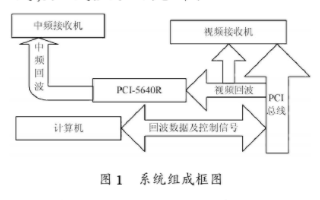
基于LabVIEW軟件和PCl-5640R數據卡實現和雷達回波模擬器的設計
雷達目標模擬器的DSP軟件設計
基于CPCI接口DSP板的雷達目標模擬器
基于DSP+FPGA的雷達信號模擬器系統設計
一種自主產生式的雷達回波模擬器中頻部分的設計實現方法論述
一種自主產生式的雷達回波模擬器中頻部分的設計論述
雷達回波模擬器的設計方法是什么?
一種雷達回波信號模擬器的設計與實現
雷達回波模擬器設計與應用
雷達回波模擬器中頻部分的實現

基于DSP和FPGA的多波形雷達回波中頻模擬器實現
水下目標回波模擬器并行仿真軟件框架研究

在FPGA中SAR回波模擬中回波信號多普勒相位的兩種實現方法
如何實現雷達回波模擬電路的設計





 工商網監
工商網監
評論