 OFDM-MSK-LFM雷達通信一體化信號性能分析
OFDM-MSK-LFM雷達通信一體化信號性能分析
一、前言
現代電子戰對頻譜資源利用越來越多,致使系統復雜性越來越高、電磁干擾愈來愈嚴重,因此部分學者提出了雷達通信一體化系統,旨在高效的使用頻譜資源,降低設備復雜度。雷達通信一體化信號的優化設計是其重點研究方向,本文主要研究典型一體化信號OFDM-MSK-LFM。雷達通信一體化技術是雷達信號與通信信號復合而成的,設計的基本要求是要考慮雷達與通信性能的均衡,因此無論是雷達信號還是通信信號,均需要合理的選擇,本文考慮頻譜利用率選擇OFDM信號,考慮雷達傳輸的恒包絡要求,選擇MSK調制技術與LFM雷達信號。
二、OFDM-MSK-LFM一體化信號模型
2.1 MSK調制原理
由于在前述兩篇文章OFDM-16QAM-LFM與OFDM-BPSK-LFM中已經介紹了OFDM-LFM系列一體化信號模型,在此我們就不過多贅述,需要了解的同學可以查看對應的文章,也可以參考文末參考文獻。
MSK信號具有恒定的信息包絡且每兩個碼元之間相位不會跳變,占用帶寬也較小,將其與OFDM-LFM信號相結合可得到一體化信號。
MSK 信號的第k 個碼元可以表示為

式中:ak為第k個輸入碼元,取值為±1; φk為第個碼元的相位常數,在時間kTs<t≤(k+1)Ts內保持不變,其作用是在t=kTs處保持相位連續。



MSK調制原理如下圖所示,基帶碼元先差分編碼,然后經過串并轉換分成I、Q兩路,再與對應的載波相乘,然后再相加完成MSK的調制。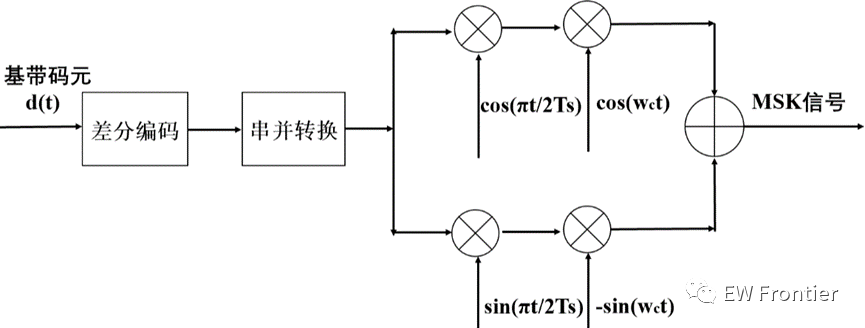
圖1 MSK調制信號生成過程
2.2OFDM-MSK-LFM一體化信號
結合OFDM-LFM 技術得到一體化波形公式推導為

三、仿真分析
參數設置:OFDM:采樣率100Mhz,載波數2;LFM:帶寬40Mhz,脈寬12us,載頻10Mhz;MSK:載頻4Khz。
3.1 MSK調制
根據圖2和圖3不難看出,MSK信號具有良好的恒包絡性,這一特性能夠使其在雷達探測過程中保持良好感知能力,同時不會影響模糊函數,與此同時MSK加入了調制數據,進一步實現通信與感知的并存。觀察圖3,可以發現MSK信號的頻譜主要集中與兩個頻率,具有較高的頻帶利用率,這也滿足雷達通信一體化的基本要求。基于上述條件,可以發現MSK調制是一種適合用于雷達通信一體化技術的調制方式。
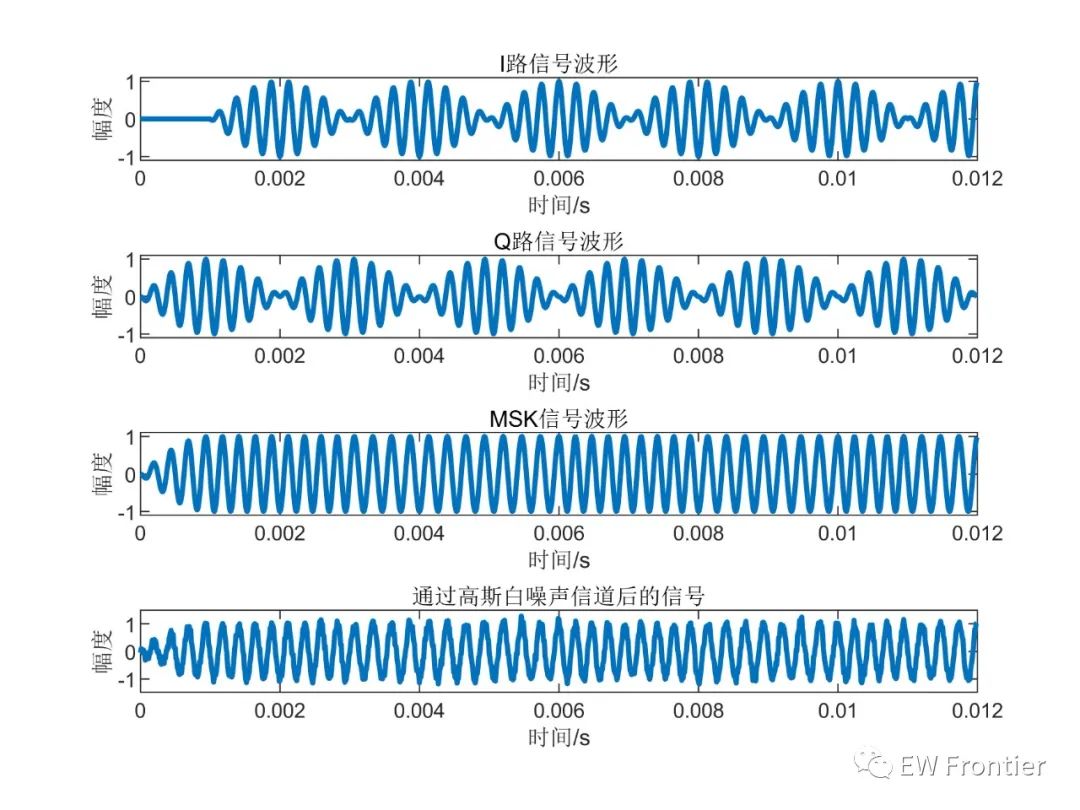 圖2 MSK信號時域波形
圖2 MSK信號時域波形
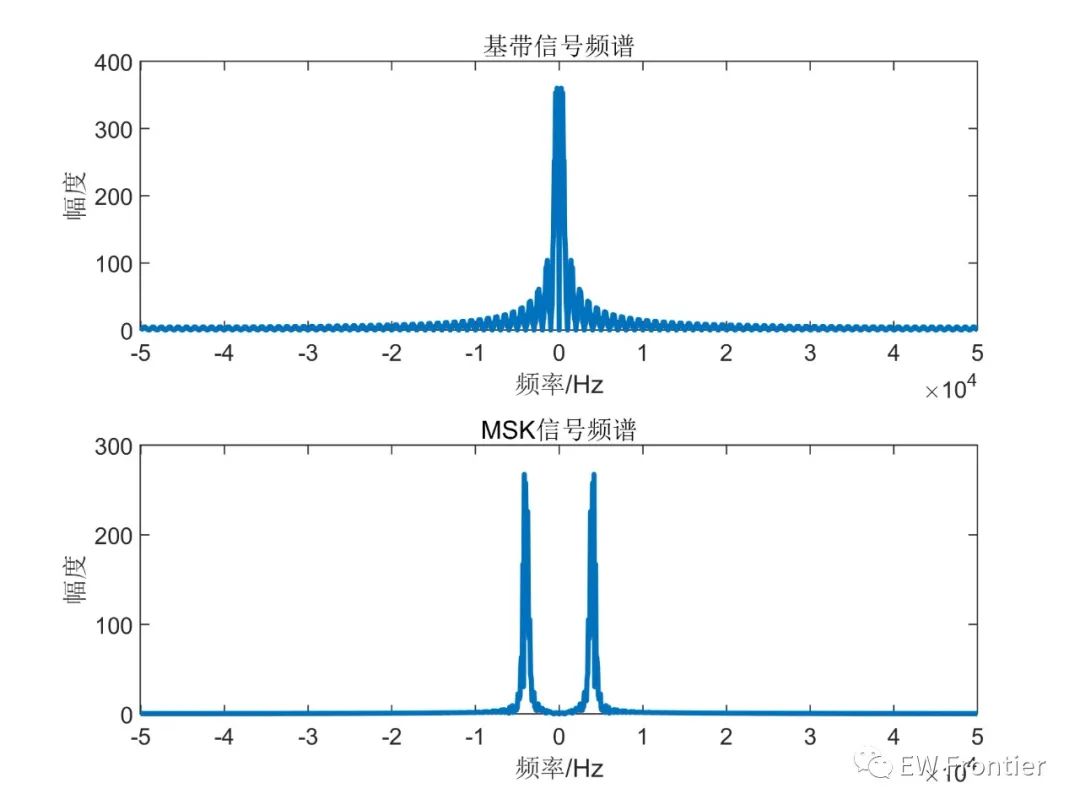
圖3 MSK信號頻譜
3.2 OFDM-MSK-LFM模糊函數
圖4-圖6分別是OFDMMSK-LFM的模糊函數三維視圖、速度切片與距離切片,看過之前OFDM-16QAM-LFM與OFDM-BPSK-LFM兩篇文章的同學應該能夠發現MSK調制令一體化信號的模糊函數更趨于圖釘形狀,具有較低的旁瓣,因此其雷達探測能力得到很好的保證,而OFDM-MSK-LFM信號的通信誤碼率取決于MSK調制,在文末參考文獻中有相應的介紹,其通信可靠性較高。
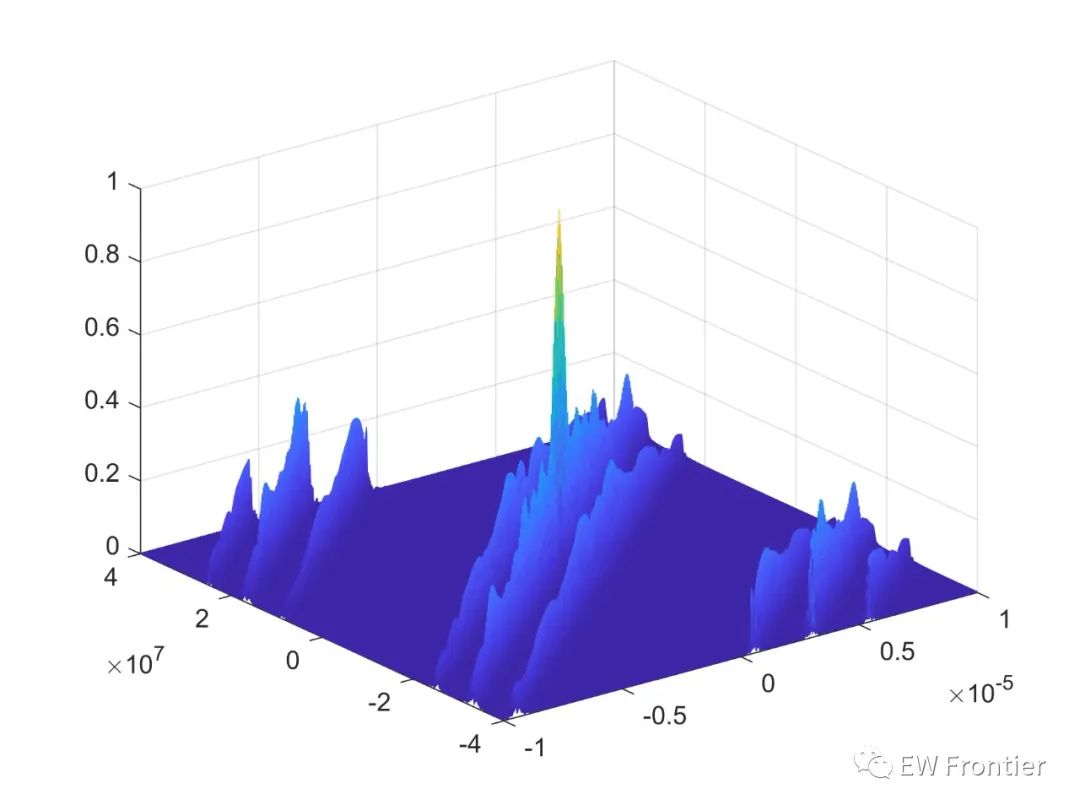
圖4 OFDM-MSK-LFM模糊函數三維圖
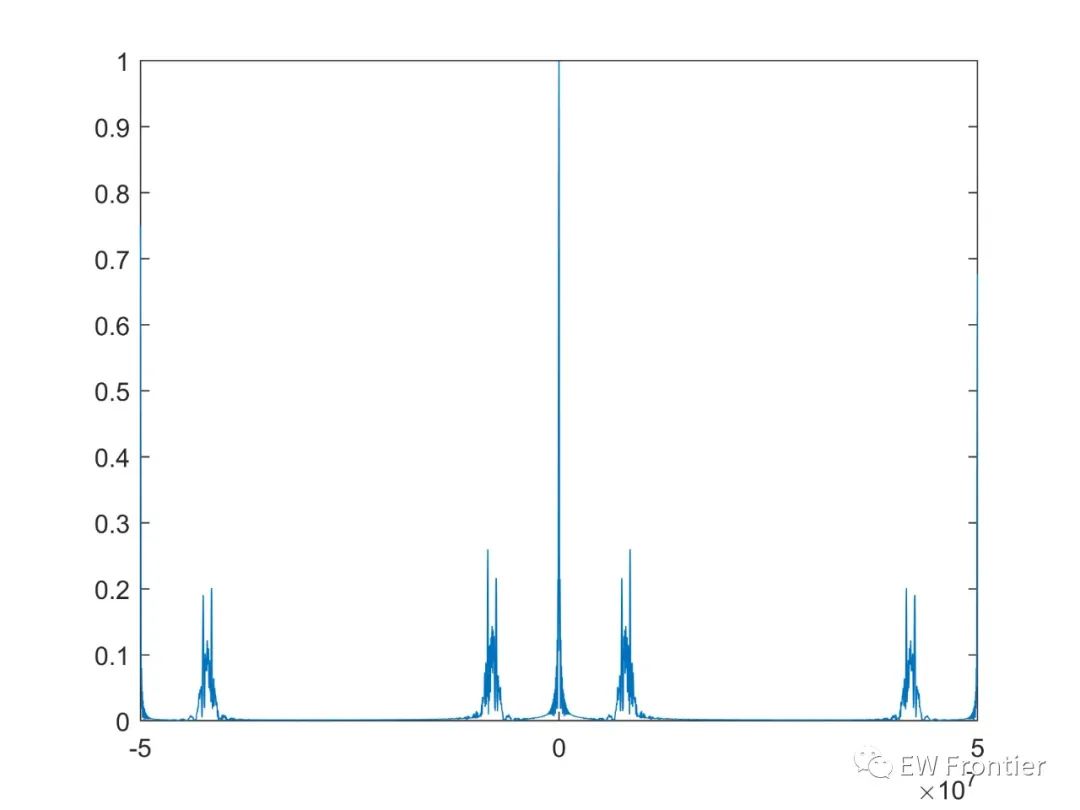 圖5 OFDM-MSK-LFM零多普勒
圖5 OFDM-MSK-LFM零多普勒
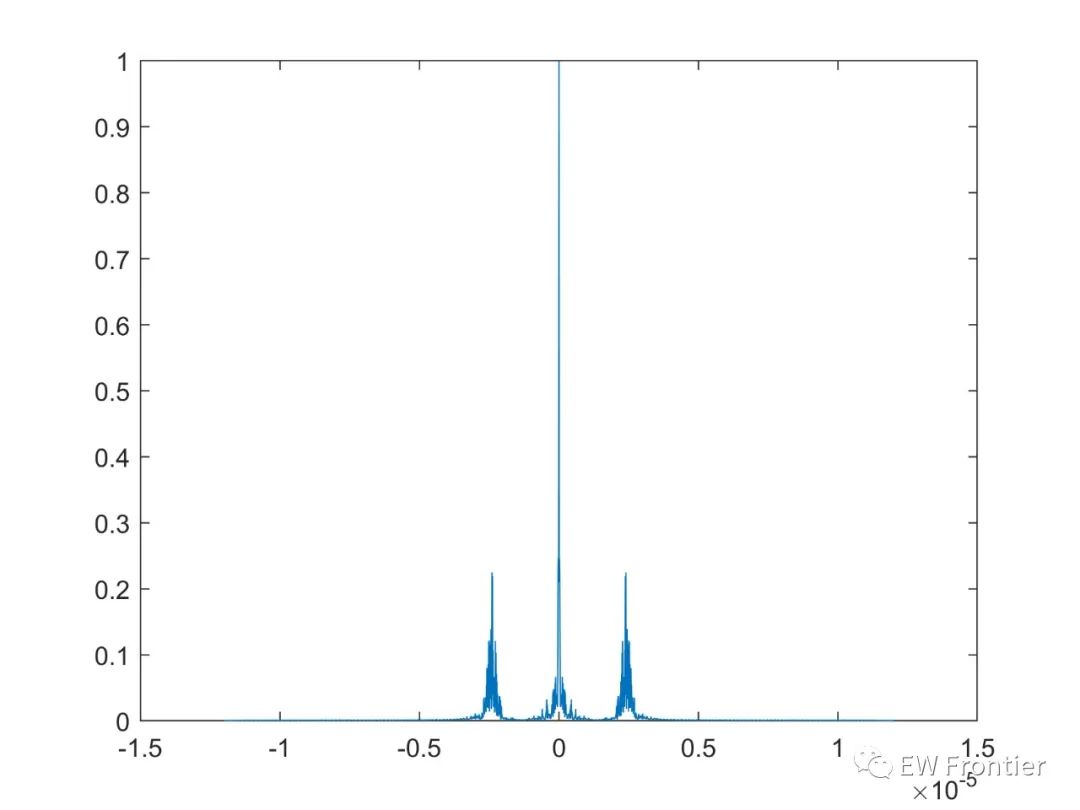
圖5 OFDM-MSK-LFM零時延
四、總結
雷達通信一體化技術需要良好的通信信號、雷達信號以及調制方式,這三者共同決定了一體化信號的雷達探測性能與通信性能,因此本文將OFDM、LFM與MSK三種技術相結合,主要利用了OFDM的頻譜利用率、信息傳輸速率,LFM的良好探測性能,MSK攜帶調制信息能夠保證恒包絡性,不影響雷達探測。
其實雷達通信一體化信號設計最簡單的就是這類組合優化設計,希望本文對相關研究的同學能有幫助。 參考文獻
[1]肖博,霍凱,劉永祥.雷達通信一體化研究現狀與發展趨勢[J].電子與信息學報, 2019, 41(3): 739–750.
[2]趙忠凱,石妙.基于OFDM-LFM的雷達通信一體化波形設計[J].應用科技,2021,48(3):73-77.
OFDM-MSK-LFM一體化信號代碼詳見:https://mbd.pub/o/myCreated 學術交流Q群:479772742 MSK調制代碼: clear all; % 清除所有變量 close all; % 關閉所有窗口 clc; % 清屏 %% 基本參數 M=11; % 產生碼元數 L=100; % 每碼元復制L次,每個碼元采樣次數 Ts=0.001; % 每個碼元的寬度,即碼元的持續時間 Rb=1/Ts; % 碼元速率1K dt=Ts/L; % 采樣間隔 TotalT=M*Ts; % 絕對碼總時間 t=0TotalT-dt; % 時間1 TotalT2=(M+1)*Ts; % 相對碼總時間 t2=0TotalT2-dt; % 時間2 Fs=1/dt; % 采樣間隔的倒數即采樣頻率 %% 產生單極性波形 wave=randi([0,1],1,M); % 產生二進制隨機碼,M為碼元個數 %% 絕對碼變相對碼 wave2=ones(1,M+1); % 產生1*(M+1)的全1行向量 %% 相對碼第一個參考值為1,相對碼b(n+1)=絕對碼a(n)和相對碼b(n)做異或 for k = 2:M+1 wave2(k) = xor(wave(k-1),wave2(k-1));%生成相對碼 end fz=ones(1,L); % 定義復制的次數L,L為每碼元的采樣點數 x1=wave(fz,:); % 將原來wave的第一行復制L次,稱為L*M的矩陣 juedui=reshape(x1,1,L*M); % 將剛得到的L*M矩陣,按列重新排列形成1*(L*M)的矩陣 x2=wave2(fz,:); % 將原來wave2的第一行復制L次,稱為L*(M+1)的矩陣 jidai=reshape(x2,1,L*(M+1));% 將剛得到的L*(M+1)矩陣,按列重新排列形成1*(L*(M+1))的矩陣 %% 單極性變為雙極性 % 基帶信號變為雙極性即jidai為1的時候,jidai為1;jidai為0的時候,jidai為-1 for n=1:length(jidai) if jidai(n)==1 jidai(n)=1; else jidai(n)=-1; end end %% 產生I、Q兩路碼元 I_lu=wave2(1end); % 相對碼的奇數位置為I路碼元 Q_lu=wave2(2end); % 相對碼的偶數位置為Q路碼元 %% I、Q兩路單極性碼元變為雙極性碼元 I_lu=2*I_lu-1; Q_lu=2*Q_lu-1; %%I、Q兩路碼元的單個碼元的持續時間是原始碼元中單個碼元的兩倍,Tb=2Ts,并且I路碼元延時Ts fz2=ones(1,2*L); % 定義復制的次數2L x3=I_lu(fz2,:); % 將原來I_lu的第一行復制2L次,稱為2L*((M+1)/2)的矩陣 I=reshape(x3,1,(2*L)*((M+1)/2));% 將剛得到的2L*((M+1)/2)矩陣,按列重新排列形成1*(2L*((M+1)/2))的矩陣 x4=Q_lu(fz2,:); % 將原來Q_lu的第一行復制2L次,稱為2L*((M+1)/2)的矩陣 Q=reshape(x4,1,(2*L)*((M+1)/2));% 將剛得到的2L*((M+1)/2)矩陣,按列重新排列形成1*(2L*((M+1)/2))的矩陣 I_yanshi=zeros(1,length(I));% 產生1*length(I)的零向量 % I路延時Ts,即I路1至L置零,原來1至(2*L)*((M+1)/2)-L的數移動到L+1至最后 I_yanshi(L+1:end)=I(1:(2*L)*((M+1)/2)-L); %% 繪制碼元波形 figure(1); % 繪制第1幅圖 subplot(411); % 窗口分割成4*1的,當前是第1個子圖 plot(t,juedui,'LineWidth',2);% 繪制絕對碼元波形,線寬為2 title('絕對碼信號波形'); % 標題 xlabel('時間/s'); % x軸標簽 ylabel('幅度'); % y軸標簽 axis([0,TotalT,-1.1,1.1]) % 坐標范圍限制 subplot(412); % 窗口分割成4*1的,當前是第2個子圖 plot(t2,jidai,'LineWidth',2);% 繪制相對碼元波形,線寬為2 title('相對碼信號波形'); % 標題 xlabel('時間/s'); % x軸標簽 ylabel('幅度'); % y軸標簽 axis([0,TotalT2,-1.1,1.1]) % 坐標范圍限制 subplot(413); % 窗口分割成4*1的,當前是第3個子圖 plot(t2,I,'LineWidth',2); % 繪制I路碼元波形,線寬為2 title('I路信號波形'); % 標題 xlabel('時間/s'); % x軸標簽 ylabel('幅度'); % y軸標簽 axis([0,TotalT2,-1.1,1.1]) % 坐標范圍限制 subplot(414); % 窗口分割成4*1的,當前是第4個子圖 plot(t2,Q,'LineWidth',2); % 繪制Q路碼元波形,線寬為2 title('Q路信號波形'); % 標題 xlabel('時間/s'); % x軸標簽 ylabel('幅度'); % y軸標簽 axis([0,TotalT2,-1.1,1.1]) % 坐標范圍限制 %% MSK調制 fc1=4000; % 載波1頻率4kHz fc2=1/(4*Ts); % 載波2頻率1/(4*Ts) zb1=cos(2*pi*fc1*t2); % 同相載波1 zb2=-sin(2*pi*fc1*t2); % 正交載波1 zb3=cos(2*pi*fc2*t2); % 同相載波2 zb4=sin(2*pi*fc2*t2); % 正交載波2 I_wave=I_yanshi.*zb1; I_wave=I_wave.*zb3; % I路波形 Q_wave=Q.*zb2; Q_wave=Q_wave.*zb4; % Q路波形 msk=I_wave+Q_wave; % MSK的調制 figure(2); % 繪制第2幅圖 subplot(411) % 窗口分割成4*1的,當前是第1個子圖 plot(t2,I_wave,'LineWidth',2);% 繪制I路信號的波形 title('I路信號波形') % 標題 axis([0,TotalT2,-1.1,1.1]); % 坐標范圍限制 xlabel('時間/s'); % x軸標簽 ylabel('幅度'); % y軸標簽 subplot(412) % 窗口分割成4*1的,當前是第2個子圖 plot(t2,Q_wave,'LineWidth',2);% 繪制Q路信號的波形 title('Q路信號波形') % 標題 axis([0,TotalT2,-1.1,1.1]); % 坐標范圍限制 xlabel('時間/s'); % x軸標簽 ylabel('幅度'); % y軸標簽 subplot(413) % 窗口分割成4*1的,當前是第3個子圖 plot(t2,msk,'LineWidth',2); % 繪制MSK的波形 title('MSK信號波形') % 標題 axis([0,TotalT2,-1.1,1.1]); % 坐標范圍限制 xlabel('時間/s'); % x軸標簽 ylabel('幅度');%y軸標簽
-
ofdm
+關注
關注
6文章
349瀏覽量
57001 -
通信
+關注
關注
18文章
6024瀏覽量
135950 -
信號
+關注
關注
11文章
2789瀏覽量
76730 -
雷達
+關注
關注
50文章
2930瀏覽量
117465 -
MSK
+關注
關注
0文章
14瀏覽量
15343
發布評論請先 登錄
相關推薦
到底什么是“通感一體化”?


談談機電一體化技術的現狀及發展趨勢
什么是機電一體化
機電一體化系統
如何實現機電一體化設計?
STM-M系列(高性能)CANopen通信一體化步進電機快速使用教程

通信感知一體化關鍵技術(IMT-2030 6G)


OFDM-MSK-LFM雷達通信一體化信號性能分析






 工商網監
工商網監
評論