


按:這是筆者在汽車發(fā)動機工廠做維修工程師時的一篇文字,文中所涉及的曲軸平衡機是英國產(chǎn)品,文中大部分內(nèi)容仍具有參考價值,發(fā)出來以饗同行。
1曲軸動平衡的基本原理解析
曲軸去重平衡機是典型的機電一體化設(shè)備,集成了機械加工、計算機數(shù)控、微電子技術(shù)、發(fā)動機工藝?yán)碚摰燃夹g(shù)于一體,是我廠比復(fù)雜的設(shè)備之一。
首先,簡要地了解動平衡理論有助于我們正確地掌握該設(shè)備。
1.1平衡理論
(1)什么是不平衡量
以一個均勻轉(zhuǎn)子為例,如圖1:

圖1:均勻轉(zhuǎn)子的幾何支撐軸線OO'與慣性軸線和MM'
正常情況下,其慣性主軸線應(yīng)與支撐主軸線重合,如不重合,則表示該轉(zhuǎn)子不平衡。其不平衡量可用下式表示:
U=m×r
單位:g.cm,m:不平衡質(zhì)量,不平衡半徑。
真正的轉(zhuǎn)子不平衡程度不僅與不平衡質(zhì)量和不平衡半徑有關(guān),而且與轉(zhuǎn)子的總質(zhì)量M有直接關(guān)系,顯然,同樣的U值,M越大,表示不平衡程度越小;M越小,則表示不平衡程度越大。由此,引入了偏心距的概念。
即,偏心距:E = mr/M=U/M
這個參數(shù)能較為準(zhǔn)確地表示一個轉(zhuǎn)子的不平衡程度。
(2)不平衡量的常見分布形式
這里主要是指和曲軸不平衡相關(guān)的:“徑向不平衡”。其常見形式有:
1)靜不平衡
慣性軸線與幾何支撐軸線平行.如圖2:
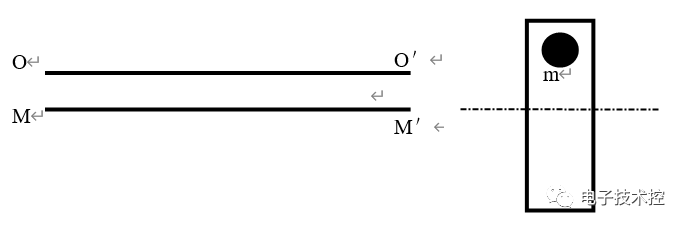
圖2:靜不平衡示意圖
2)偶不平衡
慣性軸線與幾何支撐軸線斜交于幾何軸線的中心點。如圖3:

圖3:偶不平衡示意圖
3)準(zhǔn)靜不平衡
慣性軸線與幾何支撐軸線斜交,但不過中心點。如圖4:
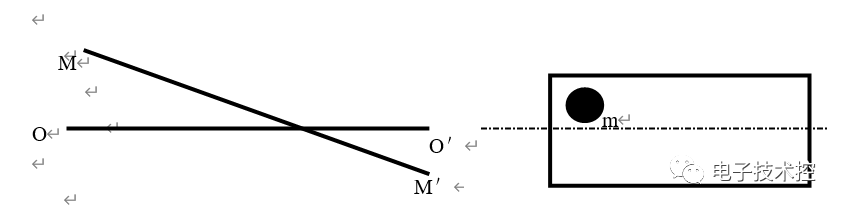
圖4:準(zhǔn)靜不平衡示意圖
4)動不平衡
慣性軸線與幾何支撐軸線不相交,亦不平行。如圖5:
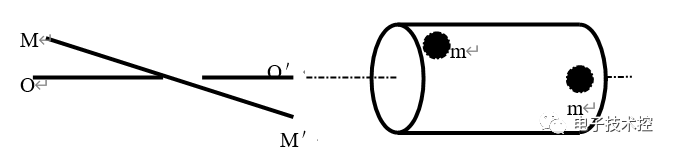
圖5:動不平衡示意圖
曲軸的不平衡即屬于這種類型,由于其不平衡量的分布特點,去重時最少要平衡兩點以上。
(3)不平衡量的工業(yè)標(biāo)準(zhǔn)
國標(biāo)ISO1940規(guī)定了不平衡量的工業(yè)標(biāo)準(zhǔn),即:
G=EW/1000
其中,E:偏心距。微米。
W:轉(zhuǎn)速。弧度/秒。
G取值一般為G0.4-G4000,曲軸在G40-G100之間。
1.2動平衡機
(1)平衡機測量的基本力學(xué)關(guān)系
如下圖,為一臺平衡機的測量系統(tǒng)局部結(jié)構(gòu)示意圖。
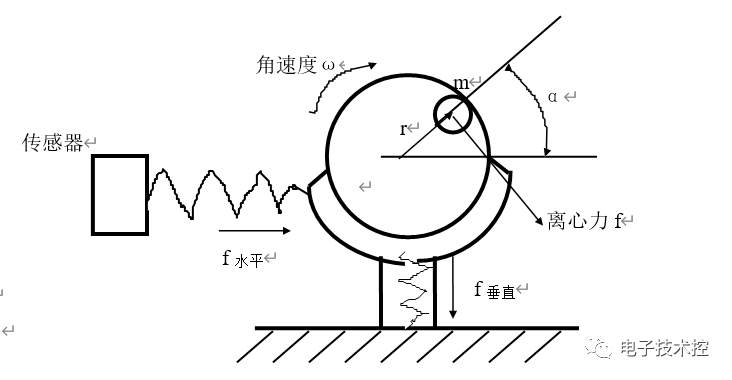
圖6:一個簡單的平衡機測量裝置
圖中不平衡量m產(chǎn)生的離心力:
f=mrw^2
水平方向的離心力分量:
f水平= mrw^2 cosα
垂直方向的離心力分量:
f垂直=mrw^2sinα
支撐彈簧變形量:
A=f垂直/K,K為彈性系數(shù)。
水平力傳遞給傳感器,由傳感器測取并產(chǎn)生電壓信號,送控制系統(tǒng)。
(2)平衡方程
一個系統(tǒng)的平衡方程如下:
MX″+CX′+KX=mrw^2
其中:
M:轉(zhuǎn)子質(zhì)量。
X:支撐體變形量。
m:不平衡質(zhì)量。
r:不平衡半徑。
w:轉(zhuǎn)子角速度。
C:阻尼系數(shù)。主要來自風(fēng)阻,摩擦阻尼。
K:支撐體彈性系數(shù)。
阻尼力很小,一般分析時可不予考慮。
(3)硬支撐平衡機的力學(xué)分析
當(dāng)?shù)鼗銐蚍€(wěn)定時,可以不考慮慣性力時KX",可以設(shè)計為硬支撐結(jié)構(gòu)。這時,平衡方程可改寫為:
X=mrw^2/K
可見,硬支撐平衡機與床身質(zhì)量無關(guān),出廠時做一次性標(biāo)定即可,無須經(jīng)常標(biāo)定。但對地基要求高,否則慣性力將產(chǎn)生影響,影響平衡精度。
機床的共振點為:

對硬支撐平衡機,工件轉(zhuǎn)速應(yīng)在w0/3以內(nèi)。
(4)軟支撐平衡機的力學(xué)分析
這種平衡機的彈性力相對于慣性力而言,由于支撐彈簧很軟,彈性力很小,可以忽略。平衡方程為:
MX"=mrw^2
X"=mrw^2/M
X"為加速度,可使用加速度傳感器測量。
由于式中包括機床質(zhì)量M,故機床需要經(jīng)常標(biāo)定,對地基要求不高。
這種平衡機的工件轉(zhuǎn)速一般控制在2-2.5w0之內(nèi)。
(5)半硬支撐平衡機的力學(xué)分析
這種平衡機既要考慮慣性力,又要考慮彈性力。其平衡方程為:
MX"+KX=mrw^2
這一方程的計算較為困難,從力學(xué)關(guān)系來進(jìn)行分析,可以從下面公式進(jìn)行不平衡量的分離。即:
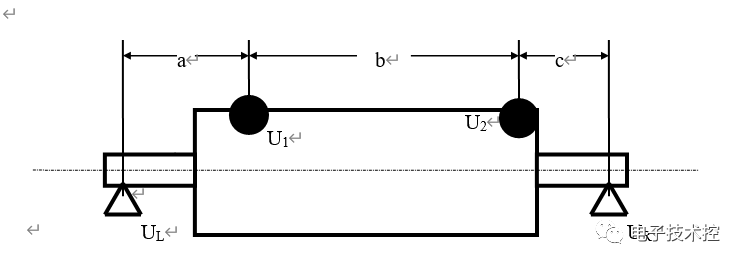
圖7:不平衡量的分離
如圖,有:
U1=UL+(UL*a/b-UR*c/b)
U2=UR- (UL*a/b-UR*c/b)
顯然,當(dāng)去重點事先選定后,很容易依據(jù)從支撐點測量到的不平衡量UL和UR確定應(yīng)去重量U1及U2。
半硬支撐的平衡機,其工件轉(zhuǎn)速在w0附近,因而靈敏度高。它對地基的要求介于硬支撐和軟支撐之間。
(6)我廠平衡機類型及曲軸去重
美國引進(jìn)的平衡機屬于軟支撐型,而新采購平衡機(日本)屬于半硬支撐型。由此,我們不難得出兩臺機床在使用和保養(yǎng)中應(yīng)注意哪些問題的結(jié)論。
兩臺設(shè)備的曲軸去重點都是10°、130°、190°、250°四個點。
常見的曲軸驅(qū)動方式有摩擦輪驅(qū)動、皮帶輪驅(qū)動、端部驅(qū)動和虎殼驅(qū)動四種。我廠的美國平衡機為端部驅(qū)動,這種驅(qū)動方式對聯(lián)軸節(jié)要求很高,需要經(jīng)常進(jìn)行補償和對聯(lián)軸節(jié)做調(diào)整。
去重量點理論上越少越好,這樣可以減少工件的內(nèi)應(yīng)力。
2 數(shù)控部分解析
2.1硬件構(gòu)成
該系統(tǒng)使用FANUC公司POWER MATE-MODEL D系統(tǒng)。硬件部分這里不做詳細(xì)介紹,細(xì)節(jié)請查閱數(shù)控部分的說明書。
2.2加工程序分析
經(jīng)過比對工藝過程,對程序做了詳細(xì)解析,弄懂了CNC程序流程。詳解如下:
O0001(WORK 2.2L);2.2L發(fā)動機曲軸加工主程序。
#100=-190;快進(jìn)行程變量賦值。
#101=125.4;切削速度變量賦值。
#102=530;最大切削深度變量賦值。
M98 P1001;轉(zhuǎn)到O1001程序。
M30;程序結(jié)束。
O0002(WORK 2.5 L);2.5L發(fā)動機機加工主程序。
#100=-190;快進(jìn)行程變量賦值。
#101=-125.4;切削速度變量賦值。
#102=530;最大切削深度變量賦值。
M98 P1001;轉(zhuǎn)到O1001程序。
M30;程序結(jié)束。
O1001;加工子程序1。
G91 G30 Z0;回原點。
IF (#1032 EQ 0) GOTO 30;如果#1及#2頭應(yīng)去重深度變量#1032=0,
轉(zhuǎn)到N30。
M03;主軸起動。
#110= #1032 AND 4095;取#1032的前12位送#110。
IF(#102 LT #110) GOTO 10;如果#102(最大切削深度)小于
#110(應(yīng)去重深度),轉(zhuǎn)到N10。
IF(#102 GE #110) GOTO 20;如果#102(最大切削深度)大于
#110(應(yīng)去重深度),轉(zhuǎn)到N20。
N10 #110= #102;把最大切削深度值賦給#110。
N20 #110=-#110;#110取反。
#110= #110/10;#110值/10。
G90 G00 Z #100;快速進(jìn)給到#100(將接觸工件)位置。
M98 P1003;轉(zhuǎn)到O1003程序。
N30 M53;通知PLC加工結(jié)束。
G91 G30 Z0;返回原點。
M05;主軸停止。
N40 M99;返回主程序。
O1003;加工子程序2。
M03;主軸起動。*(沒必要)。
IF (#1014 EQ 0) GOTO 45;如果#1014=0,轉(zhuǎn)到N45。
M55;通知PLC將進(jìn)行一次去重量的低八位傳送。
#121= #1032 AND 255;取應(yīng)去重深度的低八位,賦給#121。
M56;通知PLC將進(jìn)行一次去重量的高八位傳送。
#122= #1032 AND 255;取應(yīng)去重深度的高八位,賦給#122。
M54;通知PLC數(shù)據(jù)傳送完成。
#124= #122×256;把去重量高八位后加八個零,賦給#124。
#123= #121+ #124;把去重量的全部十六位合并,賦給#123。
#123= #123/10;一次去重量#123/10。
#123=-#123;#123取反。
#125= #123+5.0;設(shè)置中速移動的終點坐標(biāo),賦給#125。
G90 G01 Z #125 F1500;中速移動到#125位置。
G90 G01 Z#123 F#101;工進(jìn)(慢速)去掉全部超重量。
GOTO 55;轉(zhuǎn)到N55。
N45 G90 G00 Z#100;快速進(jìn)給到將接觸工件位置。
IF (#1015 EQ 1) GOTO 50;如果#1015(接觸工件,即開門信號)
=1(為真),則轉(zhuǎn)到N50。(#1015由NC的#1頭開門標(biāo)志寄存
器5006及#2號頭的開門標(biāo)志寄存器5306自動賦值)。
G91 G31 Z-10.0 F#101;如尚未接觸工件,則慢速進(jìn)給,試探接觸
工件位置。接觸后,跳到下一步執(zhí)行。
#500= #5061 + 0.0;把開門實際位置坐標(biāo)值#5061賦給#500。
#502= #100+(-10.0);快進(jìn)行程#100再向前10 mm所在點的坐標(biāo)賦
給#502,作為打刀檢測點坐標(biāo)。
IF (#502 LT #500) GOTO 50;如果#502小于實際開門坐標(biāo)#500,
鉆頭未斷,程序轉(zhuǎn)到N50。
M50;否則為打刀,向PLC報警。
G91 G30 Z0;動力頭退回原點。
M05;主軸停。
M99;返回主程序。
N50 G90 G01 Z#500 F#101;如未打刀,則繼續(xù)進(jìn)給到#500位置。
N55 #504= #110+0.0;應(yīng)去重深度#110加修正值,賦給#504。
#112= #504;#504賦給#112。
#113=-99.9;設(shè)步進(jìn)進(jìn)給量變量#113=-99.9。這個數(shù)值不是實際
使用值,實際值要在調(diào)試中確定。
#114=0.0;設(shè)步進(jìn)后退量變量#114=0。這個數(shù)值也不是實際使用
值,實際值要在調(diào)試中確定。
以上兩步是采用動力頭的進(jìn)二退一法,以進(jìn)行倒屑。
#115= #113+0.5;步進(jìn)進(jìn)給量加修正量賦給#115。
#116= #114+0.5;步進(jìn)后退量加修正量賦給#116。
N60 IF(#112 GE #113) GOTO 70;如果剩余去重量大于步進(jìn)進(jìn)給量,
說明即將鉆到頭,轉(zhuǎn)到N70。
G91 G01 Z#113 F#101;按步進(jìn)進(jìn)給量工進(jìn)切削。
G04 P1;停留1秒。
G91 G00 Z#114;按步進(jìn)后退量快退。
G04 P1;停留1秒。
G91 G00 Z#116;再后退0.5mm,即后退到#116位置。
G04 P1;停留1秒。
#112= #112-#115;計算剩余去重量,賦#112。
GOTO 60;回到N60繼續(xù)切削。
N70 G91 G01 Z#112 F#101;切掉最后的剩余去重量。
G04 P1;停留1秒。
#510= #5021;終點坐標(biāo)#5021送#510。
M57;通知PLC把#510值送數(shù)據(jù)存儲器。
N80 M99;返回主程序。
上面的所有變量均為帶符號數(shù)。坐標(biāo)的變化為動力頭向前為負(fù),后退為正。對所有比較命令的理解要考慮到這點,否則會得出錯誤的結(jié)論。
3不平衡量的測量原理
3.1傳感器原理及檢測
傳感器的結(jié)構(gòu)如下:
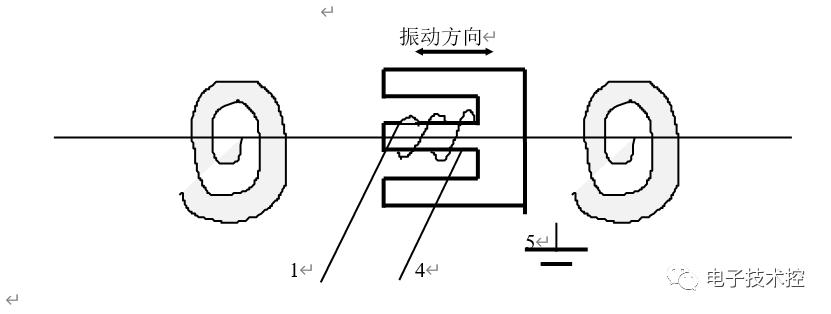
圖8:傳感器原理示意圖
顯然,它是靠鐵心振動在線圈中產(chǎn)生的電壓波動來測得不平衡量的。
該傳感器正常使用時,阻抗值在3.8-6.8KW 之間,對地絕緣為10MW以上。如超出這個范圍,則可能已經(jīng)損壞。
3.2平衡儀硬件結(jié)構(gòu)
CAB150的硬件部分共有十一塊主要控制板卡。從后面看,1-4板為平衡機控制用,5-8板為去重機用,9-11板為主計算機。
以上十一塊板不包括電源部分。
其基本框圖如下:
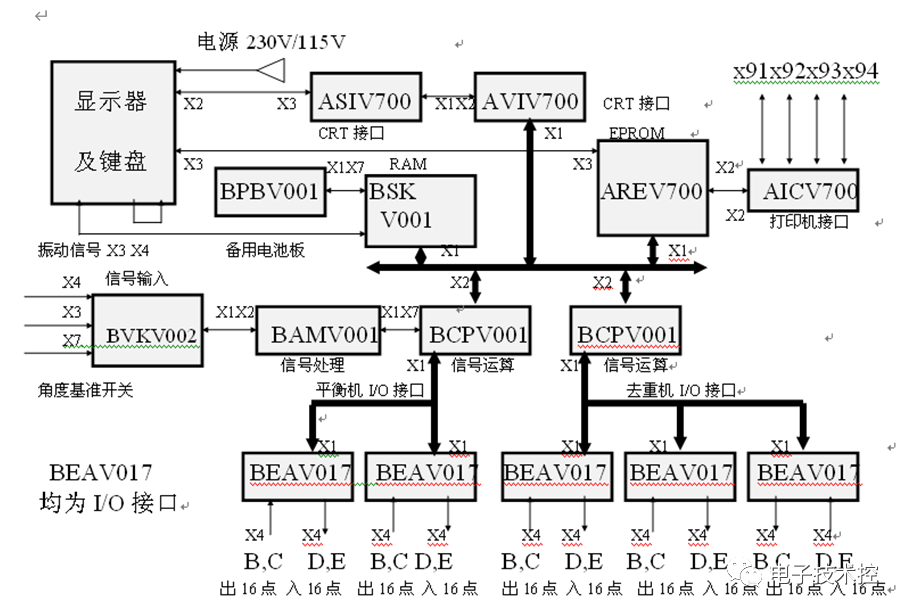
圖9:CAB750控制方框圖
3.3操作與標(biāo)定
平衡機的標(biāo)定是必須的,一般在出廠時做第一次。
值得一提的是,本平衡機標(biāo)定一次后,在相當(dāng)長的一段時間內(nèi)可以不做標(biāo)定。這是半硬支撐平衡機的特點。
4應(yīng)用對設(shè)備原理的解析指導(dǎo)實踐
正確理解曲軸平衡機這種特殊設(shè)備,用于指導(dǎo)實踐,可以明顯地使我們對設(shè)備的使用、維護(hù)和工藝方法上到一個相當(dāng)?shù)乃健?/p>
最典型的例子就是,在測量系統(tǒng)遇到外界擾動時,會偶發(fā)性出現(xiàn)去重量過大,導(dǎo)致鉆頭把曲軸鉆穿的情況,這樣即使對曲軸進(jìn)行填焊返修,也無法修復(fù)。
我們采用了增加鉆頭滑臺位置檢測的方法,在特定位置開關(guān)被觸發(fā)后,通過CNC接口信號,控制數(shù)控程序終止鉆削,并自動退出,同時系統(tǒng)給出報警。
此外,對設(shè)備的保養(yǎng)維護(hù)、控制外界不確定擾動、周期標(biāo)定等,也有明確的方向性的指導(dǎo)意義。
審核編輯:湯梓紅
-
發(fā)動機
+關(guān)注
關(guān)注
33文章
2545瀏覽量
71117 -
計算機
+關(guān)注
關(guān)注
19文章
7672瀏覽量
90914 -
微電子
+關(guān)注
關(guān)注
18文章
401瀏覽量
41932 -
機械加工
+關(guān)注
關(guān)注
1文章
74瀏覽量
14692
原文標(biāo)題:曲軸動平衡機原理解析及維修
文章出處:【微信號:電子技術(shù)控,微信公眾號:電子技術(shù)控】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
平衡機有傳動方式你知道了嗎?
動平衡機底實惠不實惠要看構(gòu)造你會嗎?
深圳廠家:主軸轉(zhuǎn)速達(dá)到多少轉(zhuǎn)時候,需要做現(xiàn)場動平衡?
現(xiàn)場動平衡方法的研究
剛性轉(zhuǎn)子動平衡設(shè)計與實驗





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論