") 從工業(yè)的自動(dòng)化走向智能化簡(jiǎn)析
從工業(yè)的自動(dòng)化走向智能化簡(jiǎn)析
在工業(yè)界,傳統(tǒng)自動(dòng)化方案均是將知識(shí)灌入機(jī)器人系統(tǒng),通過(guò)編程的形式實(shí)現(xiàn)自動(dòng)批量處理事務(wù)的功能。因此誕生了一系列計(jì)算機(jī)視覺(jué)的任務(wù)和機(jī)器人控制的任務(wù),比如一個(gè)完整的抓取分揀操作,包含了3D感知、配準(zhǔn)、點(diǎn)云分割、抓取點(diǎn)估計(jì)、任務(wù)重排、規(guī)劃、2D校準(zhǔn)等任務(wù),通過(guò)強(qiáng)大的工業(yè)軟件將這些技術(shù)點(diǎn)耦合在一起,這樣催生了工業(yè)上的絕大部分應(yīng)用。
這樣的應(yīng)用具有可控、重復(fù)性高的特點(diǎn),但是整個(gè)方案實(shí)施成本高、柔性低、換線復(fù)雜,并且每個(gè)方案都是獨(dú)特的,缺乏基準(zhǔn)和技術(shù)一致性,非常不利于整體技術(shù)的進(jìn)步,因此“解決方案”這四個(gè)字是整個(gè)行業(yè)的痛。
人類經(jīng)常被物化為工業(yè)流水線中最柔性的執(zhí)行機(jī)構(gòu),是因?yàn)槿擞^察和學(xué)習(xí)周圍的環(huán)境,使用自己的大腦充分的利用自己的身體完成各種復(fù)雜的任務(wù),并且在執(zhí)行中不斷受到更新自己的認(rèn)知,這種以身體為舟,性命為本,在塵世航行的模式,正是智能化追求的一種理想形式。這正是1950 年圖靈論文中提到的具身智能。
工業(yè)機(jī)器人的智能化發(fā)展始于具身智能。具身智能是指人工智能具有身體,需要與真實(shí)世界進(jìn)行交互。這種交互不僅涉及視覺(jué)上的高維特征提取,還包括其他感官信息,例如聽(tīng)覺(jué)、嗅覺(jué)、味覺(jué)和觸覺(jué)。通過(guò)這種交互,智能體可以獲取物理世界的真實(shí)反饋,并通過(guò)反饋來(lái)學(xué)習(xí)并進(jìn)化。具身智能是一種重要的發(fā)展方向,可以幫助機(jī)器人更好地完成任務(wù)。
而在具身智能執(zhí)行步驟一般為多傳感器的real to sim,然后sim to real的過(guò)程,具體的過(guò)程如下:
Real to Sim
通過(guò)多種感知設(shè)備和算法,盡量將現(xiàn)實(shí)世界的信息能夠還原到虛擬環(huán)境中
Sim to Real
在經(jīng)過(guò)模擬和規(guī)劃后,將算法和規(guī)劃應(yīng)用到實(shí)際機(jī)器人上
以前為什么不能提具身智能,是因?yàn)榧夹g(shù)復(fù)雜,各個(gè)技術(shù)點(diǎn)發(fā)展不成熟,但是目前2023年,很多工作已經(jīng)發(fā)展到一定的階段,尤其是大語(yǔ)言模型徹底改變了語(yǔ)義理解和頂層規(guī)劃的困難。
大語(yǔ)言模型的發(fā)展為高級(jí)規(guī)劃層鋪平了道路
隨著chatgpt證明了大語(yǔ)言模型具有較強(qiáng)的綜合思考、邏輯能力、數(shù)理能力,大語(yǔ)言模型越來(lái)越被證明,其作為機(jī)器人的上層邏輯規(guī)劃器是非常有希望的,一舉改變了機(jī)器人系統(tǒng)不智能的缺點(diǎn)。尤其值得注意的是最近c(diǎn)hain of thought配合LLMs的一些研究表明,通用AGI似乎并不遙遠(yuǎn)了。
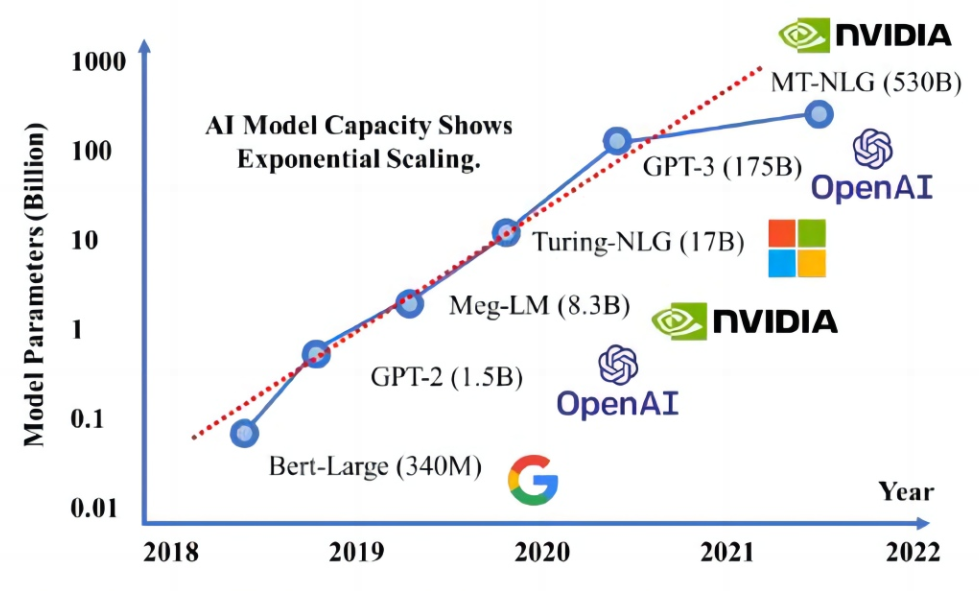
大語(yǔ)言模型的發(fā)展
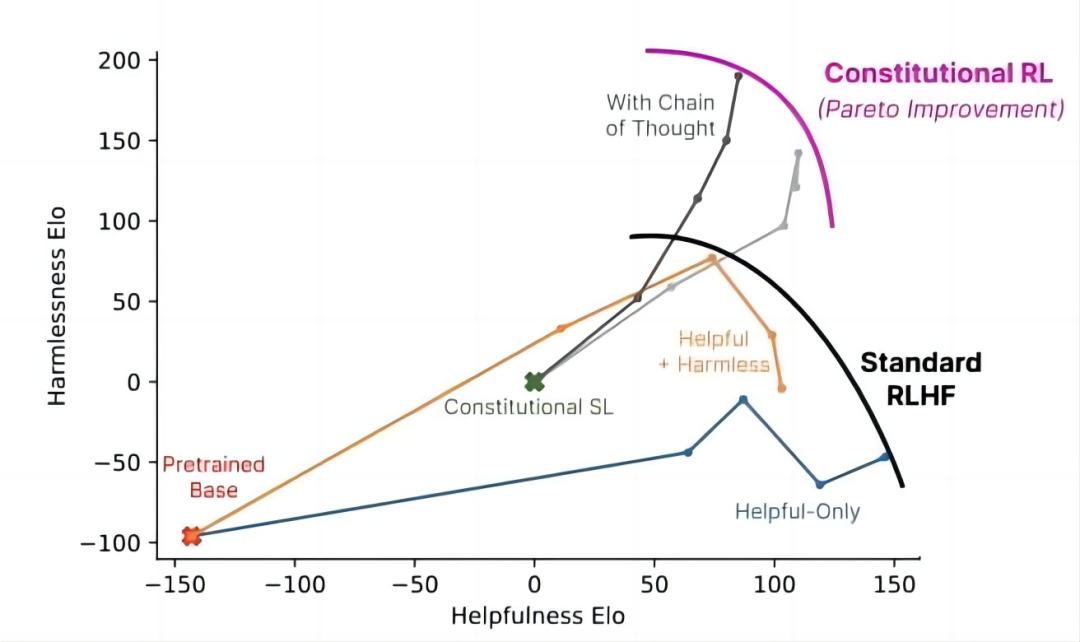
Chain of thought在無(wú)害化方向的作用
多模態(tài)模型的發(fā)展
Transformer等結(jié)構(gòu)帶來(lái)的多模態(tài)模型的發(fā)展,對(duì)統(tǒng)一圖像、行為理解、語(yǔ)音、動(dòng)作等提供了技術(shù)基礎(chǔ)。2023年3月6日,來(lái)自谷歌和德國(guó)林工業(yè)大學(xué)的一組人工智能研究人員公布了史上最大視覺(jué)語(yǔ)言模型 PaLM-E( Pathways Language Model with Embodied)。機(jī)器人可以通過(guò)圖片理解現(xiàn)狀,并根據(jù)文字指令完成任務(wù)。
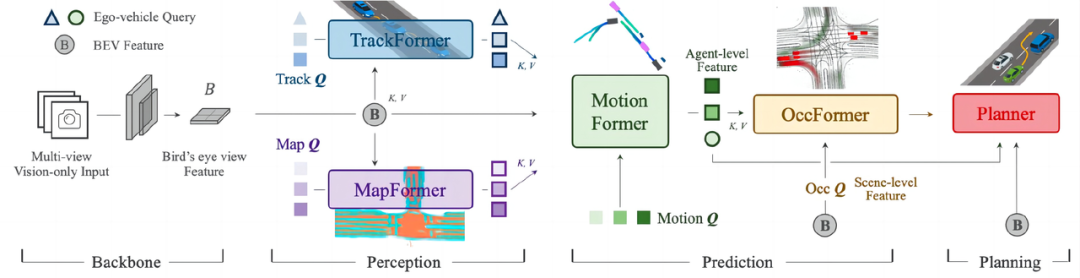
CVPR2023的best paper,UniAD工作可以端到端的處理多個(gè)自動(dòng)駕駛任務(wù),并實(shí)現(xiàn)了一個(gè)自動(dòng)駕駛的任務(wù)的全局最優(yōu)化方案,這意味者模型可以統(tǒng)一的理解所有的關(guān)鍵信息并作出決策。
Nerf-based 模型的發(fā)展為2D感知和重建
提供了豐富的手段
NeRF(Neural Radiance Fields神經(jīng)輻射場(chǎng))最早是在2020年ECCV會(huì)議上的最佳論文中提出的概念,其將隱式表達(dá)推上了一個(gè)新的高度,僅用2D的posed images作為監(jiān)督,即可表示復(fù)雜的三維場(chǎng)景。
Nerf的出現(xiàn)改變了2D估計(jì)3D的方案,基于Nerf的slam工作、重建工作等都獲得了極大的發(fā)展,改變了模型認(rèn)知世界的方法。
Nerf-based slam技術(shù)在稠密建圖導(dǎo)航中大放異彩,以NICE-SLAM為代表的模型在精度上有了較大的進(jìn)步。CVPR2023的UniSim工作實(shí)現(xiàn)了高度逼真、閉環(huán)測(cè)試(closed-loop simulation)、可擴(kuò)展 (scalable), 只需要采集一次數(shù)據(jù), 就能重建并仿真測(cè)試。
基于當(dāng)前智能技術(shù)的發(fā)展,微億智造又是如何塑造其技術(shù)路線,朝向工業(yè)智能化發(fā)展的呢?
微億智造提出了獨(dú)特的工業(yè)智能機(jī)器人的漸進(jìn)式路線:以“眼手腦云”的實(shí)施架構(gòu)為基礎(chǔ),聚焦于可累積數(shù)據(jù)場(chǎng)景和通用關(guān)鍵技術(shù),打造虛實(shí)結(jié)合的應(yīng)用產(chǎn)品,漸進(jìn)式的實(shí)現(xiàn)機(jī)器人智能化。
“眼”指的是微億智造自研的圖像感知技術(shù)與可組合光學(xué)成像系統(tǒng);“手”即是機(jī)器人智能控制,所有的技術(shù)都要通過(guò)“手”來(lái)實(shí)現(xiàn)工程化落地;“腦”是更貼合離散制造需求的多任務(wù)學(xué)習(xí)和小樣本訓(xùn)練技術(shù);“云”則是一個(gè)既能為“腦”提供算力支撐,又能鏈接政府與企業(yè)的云平臺(tái)。
下面拆解一下我們?nèi)ツ昴甑淄瞥龅?strong>數(shù)字工人——工小匠產(chǎn)品是如何踐行這個(gè)理念的。
針對(duì)碎片化的缺陷檢測(cè)工藝
建立統(tǒng)一的硬件載體和軟件系統(tǒng)
傳統(tǒng)的外觀缺陷工作分為光、機(jī)、電、算、軟五部分工作,而相關(guān)技術(shù)經(jīng)驗(yàn)和工作流都是散落在不同的工作流中。比如如果用到了機(jī)械臂,所有的機(jī)械臂程序都會(huì)在機(jī)械臂廠家定義的軟件空間里,那么相關(guān)的角度、打光方案、算法效果就無(wú)法被記錄,從而缺少了改進(jìn)的機(jī)會(huì)。微億智造將機(jī)臺(tái)標(biāo)準(zhǔn)化、集成化,一體式的完成從方案到實(shí)施的全過(guò)程,這就將所有的技術(shù)工作串聯(lián)了起來(lái)。這樣統(tǒng)一工程化的形式,一是可改進(jìn),二是可量化,三是減少了閉環(huán)的回路長(zhǎng)度。
全棧自研算法加持
加速實(shí)現(xiàn)全鏈條應(yīng)用落地
工小匠集成了運(yùn)動(dòng)控制算法、缺陷檢測(cè)算法和光學(xué)智能推薦算法,加速全鏈條的應(yīng)用速度。其中運(yùn)動(dòng)控制算法采用自研六軸機(jī)械臂位姿計(jì)算和三階約束的最優(yōu)時(shí)間軌跡規(guī)劃,可以穩(wěn)定快速的解算出機(jī)械臂的最優(yōu)運(yùn)動(dòng)軌跡。而缺陷檢測(cè)方面,基于知識(shí)注入和缺陷生成的全流程缺陷檢測(cè)系統(tǒng),在數(shù)據(jù)注入后馬上生成模型方案,并且在多條產(chǎn)線上實(shí)際驗(yàn)證能夠2周內(nèi)達(dá)到檢測(cè)標(biāo)準(zhǔn)。本系統(tǒng)中同時(shí)集成了對(duì)光學(xué)方案的智能推薦,并且把經(jīng)驗(yàn)源源不斷的注入到模型里,實(shí)現(xiàn)了光學(xué)的智能調(diào)試,這也是專機(jī)系統(tǒng)無(wú)法完成和持續(xù)進(jìn)步的。如此強(qiáng)大的算法系統(tǒng)保證了速度最優(yōu)、上線迅速、可迭代,且賦予了系統(tǒng)更強(qiáng)大的執(zhí)行力。
踐行real2sim,sim2real的理念
在工小匠產(chǎn)品中,微億智造操作的對(duì)象是工件,工件的拍照點(diǎn)位、光學(xué)方案都可以在數(shù)字空間中設(shè)置和分析,優(yōu)化后的實(shí)施方案可以通過(guò)所謂的“工小匠”硬件機(jī)臺(tái)去實(shí)施,而用戶無(wú)需關(guān)心“工小匠”是一個(gè)什么樣的機(jī)臺(tái),這就為數(shù)據(jù)記錄和工藝記錄鋪平了道路,實(shí)施的擴(kuò)展性和方便性非常高。比如更換了工裝,我們不用再調(diào)試機(jī)械臂了,復(fù)制100臺(tái),我們也不用單獨(dú)去調(diào)試每個(gè)機(jī)械臂,機(jī)臺(tái)系統(tǒng)會(huì)自動(dòng)適應(yīng)這個(gè)對(duì)象。這便是具備了具身智能的概念,使機(jī)器智能的思考如何執(zhí)行。
而相同的事情也發(fā)生在其他的工藝過(guò)程中,無(wú)論是缺陷檢測(cè)、尺寸量測(cè)、打磨、涂膠,都可以踐行相同的理念和系統(tǒng),從而讓整個(gè)工業(yè)現(xiàn)場(chǎng)變得可被優(yōu)化。縱觀整個(gè)工業(yè)智能的發(fā)展,之所以遠(yuǎn)遠(yuǎn)比不上消費(fèi)端的發(fā)展速度,其根本原因是相關(guān)的基礎(chǔ)元素沒(méi)有被很好的數(shù)字化。而微億智造基于眼、手、腦、云的技術(shù)架構(gòu)將整個(gè)機(jī)器人工藝鏈條全部數(shù)字化,在產(chǎn)線上不斷地與AI協(xié)同進(jìn)化,可以預(yù)見(jiàn)這些工藝將會(huì)以前所未有的速度升級(jí)迭代。
在當(dāng)前的技術(shù)潮流下,感、知、控等技術(shù)都已經(jīng)飛速發(fā)展,實(shí)現(xiàn)工業(yè)智能化的要素逐漸齊備,微億智造這樣的公司正是推進(jìn)這個(gè)流程的排頭兵,希望早日看到大潮漫灌!
審核編輯:劉清
-
運(yùn)動(dòng)控制器
+關(guān)注
關(guān)注
2文章
401瀏覽量
24705 -
人工智能
+關(guān)注
關(guān)注
1791文章
47183瀏覽量
238265 -
工業(yè)機(jī)器人
+關(guān)注
關(guān)注
91文章
3360瀏覽量
92624 -
計(jì)算機(jī)視覺(jué)
+關(guān)注
關(guān)注
8文章
1698瀏覽量
45977 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
784文章
13784瀏覽量
166397
原文標(biāo)題:從工業(yè)的自動(dòng)化走向智能化
文章出處:【微信號(hào):vision263com,微信公眾號(hào):新機(jī)器視覺(jué)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
可控硅在工業(yè)自動(dòng)化中的作用
工業(yè)自動(dòng)化的發(fā)展歷程與未來(lái)趨勢(shì)
智能化點(diǎn)焊電源在工業(yè)自動(dòng)化生產(chǎn)中的應(yīng)用探索

解碼“新質(zhì)生產(chǎn)力”,一站式AI工具成工業(yè)智能化升級(jí)關(guān)鍵

英德斯工控主板助力工業(yè)自動(dòng)化升級(jí)
可控硅光耦——工業(yè)自動(dòng)化智能轉(zhuǎn)型的護(hù)航先鋒

產(chǎn)線自動(dòng)化改造,智能化空調(diào)壓縮機(jī)中的工業(yè)RFID技術(shù)應(yīng)用
工業(yè)自動(dòng)化中的控制方式
工業(yè)自動(dòng)化和自動(dòng)化區(qū)別是什么
工業(yè)自動(dòng)化控制系統(tǒng)有哪些
富唯智能AI邊緣控制器:工業(yè)自動(dòng)化的智慧引擎

智能化升級(jí):PROFINET網(wǎng)絡(luò)結(jié)合TSN技術(shù)將引領(lǐng)工業(yè)自動(dòng)化新潮流

工業(yè)網(wǎng)絡(luò)交換機(jī)引領(lǐng)現(xiàn)代工廠自動(dòng)化新潮流
工業(yè)自動(dòng)化系統(tǒng)設(shè)計(jì)

創(chuàng)想焊縫跟蹤系統(tǒng)適配歡顏機(jī)器人真正實(shí)現(xiàn)焊接自動(dòng)化和智能化






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論