 雙極踏腳車(第二部分):微步和衰減模式
雙極踏腳車(第二部分):微步和衰減模式
雙極踏腳車(第二部分):微步和衰減模式
In 第一部分 第一部分 第一部分在此系列中,我們覆蓋了雙極繼子發動機的三個控制模式及其機械結構,包括雙全橋驅動器。 在第二部分中,我們將討論微步器及其控制雙全橋驅動器的方式。
以前,半步制是作為單步制和全步制相結合的組合引入的,以獲得更多的電角位置。 微步制增加了中間角位置,這創造了更精細的步驟。
圖1顯示了微梯度中的8個分區。單級階梯的90°電氣角度分為8個等距部分,代表8個現有位置。每個位置的當前位置是按A階段向風和B階段向風的當前狀態合成的矢量。由此產生的矢量的振幅始終為1。
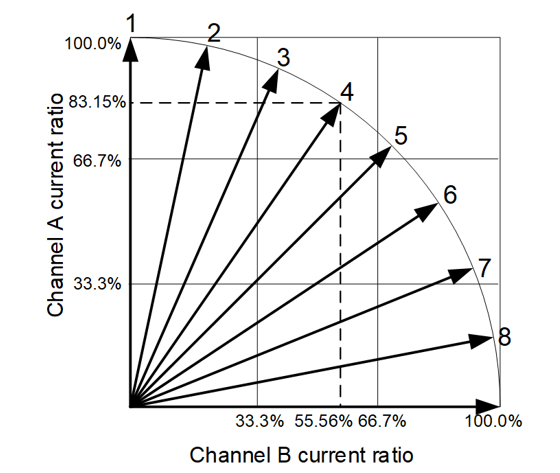
每個職位的當前位置必須分別投射到A階段和B階段,以獲得控制值(見表1)。
| 步步模式 | 當前相對級別序列(%) | 現任職務 | |
| A階段 A階段 | B階段B階段 | ||
| 第八步 | 100 | 0 | 1 |
| 98.08 | 19.51 19.51 19.51 19.51 | 2 | |
| 92.39 | 第第38.27號號 | 3 | |
| 83.15 | 55.56 | 4 | |
| 70.71 70.7 70.7 | 70.71 70.7 70.7 | 5 | |
| 55.56 | 83.15 | 6 | |
| 第第38.27號號 | 92.39 | 7 | |
| 19.51 19.51 19.51 19.51 | 98.08 | 8 | |
適用說明 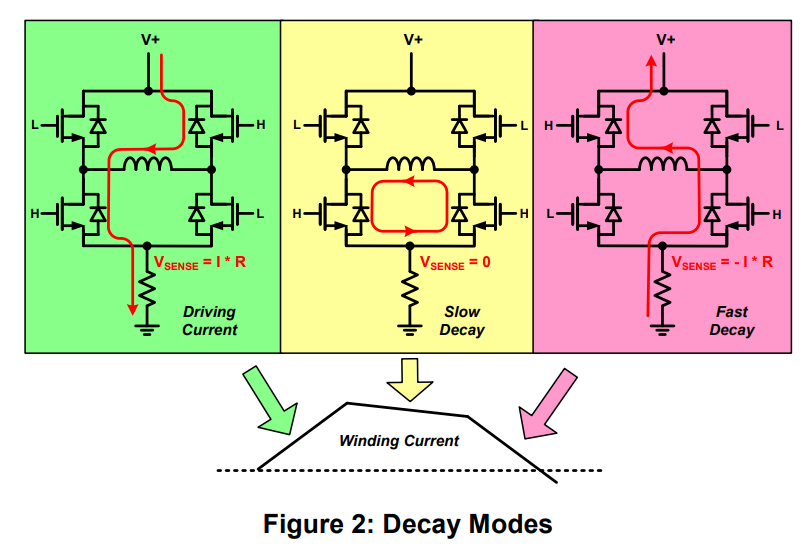
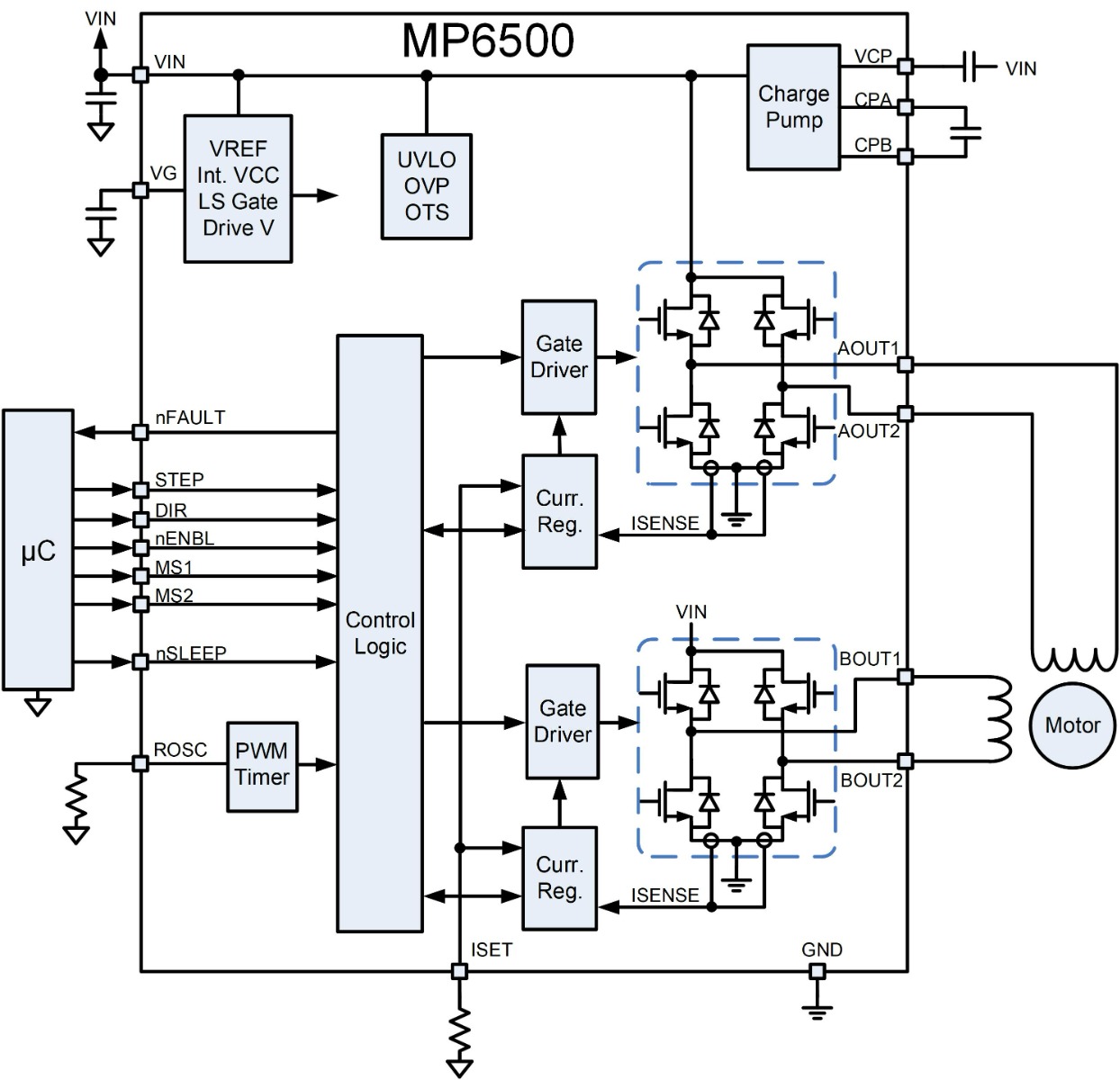
理解 MP6500 MP6500 當前控制
A階段和B階段的電流可以根據表1中的相應值加以控制,通過控制當前值,有可能在相應的角度上合成A階段和B階段的當前矢量。
在八個分區(或階梯)的控制下,雙極繼子發動機的電流類似于正弦波(見圖2 ) 。 如果有更多步驟的話,雙極繼子繼子發動機的電流類似于標準的正弦波。 正弦波形電波可以減少發動機輸出力的波動,并形成一個循環旋轉的空間磁場,從而改善雙極繼子發動機的旋轉穩定性。
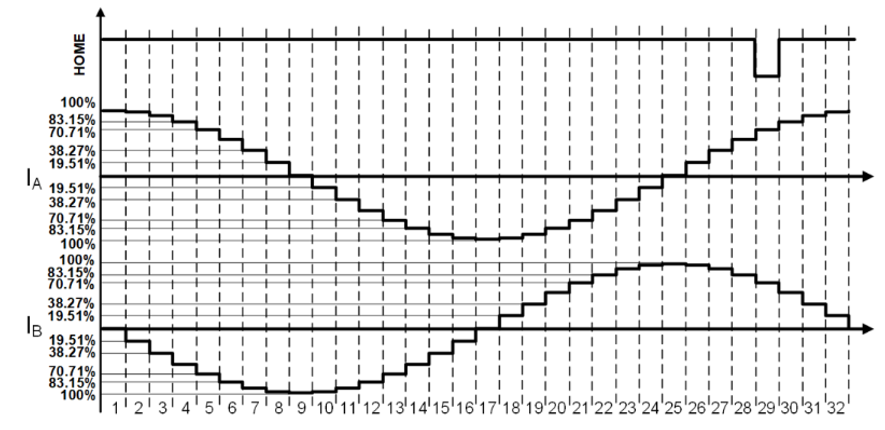
Figure 2: A階段 A階段 and B階段B階段 Current Waveform under Eight-Step Microstepping
Current Regulation with Decay Modes
緩慢的衰減和快速的衰減是用來穩定當前每一步的典型控制方法。 圖3顯示了A階段的單步。 圖3顯示了A階段目前的監管波形,這是通過控制A階段全橋驅動驅動的四個MOSFET的開關/停機功能實現的。
下文將進一步詳細討論這兩種衰變模式。
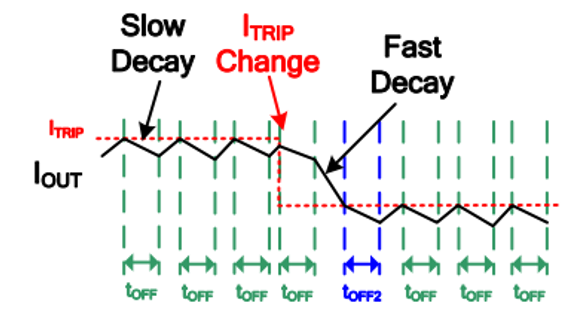
Figure 3: A階段 A階段's Current Regulation Waveform
Slow Decay
當Q1和Q4開關時,供應電壓(U)應用于A階段的刮線,而電流開始上升。 在相應的等效電路中,R是阻風力,L是推力(具有等效阻力 ) , E是轉子移動磁場在刮線時產生的反電磁力(見圖4)。
當當前值達到理想值時,必須降低當前值。 否則,當前值可能會繼續增加并超過其設定值。 在此情況下,需要慢衰減 。
圖4顯示了A級全橋驅動器的緩慢衰減過程。
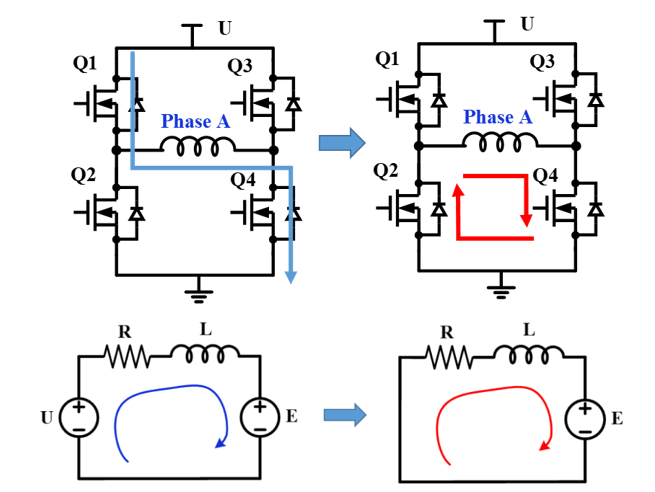
Figure 4: Slow Decay Process for A階段 A階段's Full-Bridge Drive
輸入慢衰變, 關閉 Q1 并打開 Q2( 點燃死時) 。 這相當于短路繞過 A 階段的繞線 。 由于通過 刮風的通氣, 當前方向不會突變, 而當前在兩個較低的 MOSFET 中形成循環流。 只有后電動力量( E) 作用在電路上, 電流會發生逆電壓下降 (- E) 并開始下降 。 如果阻力造成的電壓下降被忽略, 目前的電流會以( E/ L) 速度下降 。
在當前下降一段時間后, Q2 將被關閉 Q1 以允許當前再次上升 。 此過程將穩定當前在每一步的狀態 。
Fast Decay
當電流即將進入一個需要較低時, 電流必須進一步下降。 如果電流下降速度不夠快, 慢衰減速度可能不夠快, 無法將電流降低到理想水平 。 在這種情況下, 需要快速衰減( 見圖 5)。
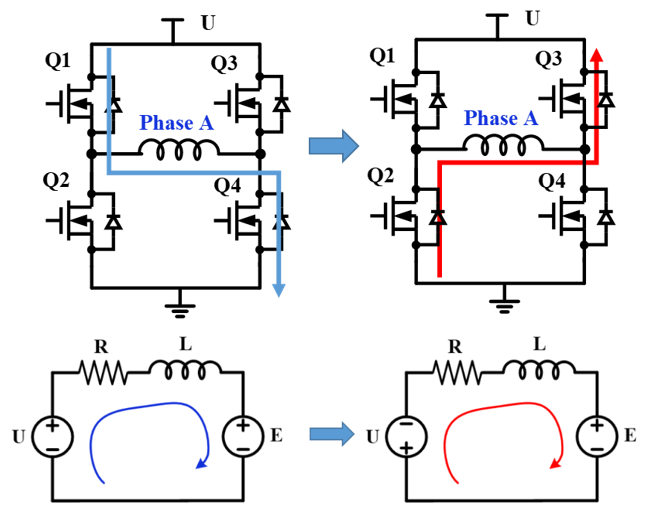
Figure 5: Fast Decay Process for A階段 A階段’s Full-Bridge Drive
在快速衰變期間, Q1 和 Q4 關閉后 , Q2 和 Q3 打開 Q1 和 Q4 關閉后 , ( 點燃死的時間 ) 。 此時, 供應電壓被逆向應用到 A 階段, 與 EMF (E) 序列一起使用 EMF (E) 。 當前的流量從 Q2 到 Q3 , 因為通過 風動 的 電流不會突然改變 。 當前的降速以 (( EU) / L) 的速度( eU) , 因此當前降速快于慢衰減的速度 。
Comparison of the Different Current Controls
當當前跌至下一個步驟的設定值時,當前監管方案可以從快速衰變變為緩慢衰變。 利用慢衰變和快速衰變讓受控電流快速變化,同時將當前波紋最小化。 圖6顯示了使用快速衰變、慢衰變以及快速和緩慢衰變組合的當前波形,而當前波狀是綠色的。
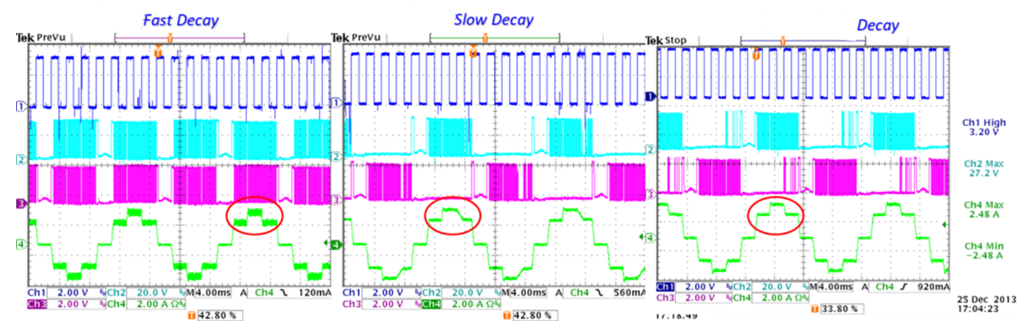
Figure 6: Current Waveforms under Different Current Controls
在緩慢衰變期間,目前的衰變在較長的一段時間內減少,而下降到下一步,但這導致了扭曲的波形。
當快速衰變和慢衰變同時起作用時,當雙極繼子體運動處于一個階梯位置時,慢衰變調節著當前,而當電流必須迅速下降到下一個階梯值時,快速衰變則更有效地控制當前。
Conclusion
微步動可以比全步或半步模式更精細的定位和平穩的操作。 本條討論了如何利用各個步驟之間的慢衰變和快速衰變來穩定當前。 此外, 這些衰變模式結合可以減少扭扭波,減少振動和噪音。
MPS 提供一系列廣泛的踏腳車司機滿足您的申請需求。
審核編輯:彭菁
-
發動機
+關注
關注
33文章
2473瀏覽量
69267 -
電流
+關注
關注
40文章
6846瀏覽量
132109 -
驅動器
+關注
關注
52文章
8226瀏覽量
146251
發布評論請先 登錄
相關推薦


SensorTile.box第二部分:專家模式(Expert mode)介紹






 工商網監
工商網監
評論