 立創梁山派開發板-21年電賽F題-送藥小車-小車角度環的調試與實現
立創梁山派開發板-21年電賽F題-送藥小車-小車角度環的調試與實現
小車轉向的調試與實現
怎么實現小車的90度轉向?
首先,在09_國產IMU移植及姿態解算.md里面我們可以獲取到小車的姿態信息,對應的轉向信息就是Yaw(偏航角)。
而在08_直流減速電機PID速度環與位置環調試中我們也可以準確控制小車輪子的轉速和轉多少個脈沖(也就是轉幾圈)了。
這樣實現小車的轉向就有了兩種方案了。一種是用Yaw(偏航角)作為測量值,想要轉的角度作為目標值,用PID驅動小車以一定的速度去旋轉來達到目標值。
第二種是在實現小車輪子位置環的基礎上,控制兩邊輪子同時向不同的方向旋轉一定的圈數(編碼器脈沖),在小車輪子不打滑的情況下轉過的角度就是一個確定的值,在送藥小車的地圖中,旋轉基本都是90度的,所以這種實現方法會很簡單也容易調試。
用角度環實現90度轉向
在pid_thread.c中實現:
創建相應的PID控制參數的結構體:
positional_pid_params_t car_angle_ring_pid;
初始化控制結構體并修改kp ki kd:
//角度環配置 //角度環 pid 參數初始化 positional_pid_init(&car_angle_ring_pid, 0.015, 0, 0, 0.1, 2, -2); //修改 角度環 kp ki kd car_angle_ring_pid.positional_pid_set_value(&car_angle_ring_pid, 0.015, 0, 0);
在PID的軟件定時器回調函數中計算兩個輪子需要的速度:
// 小車角度環
if (car_angle_ring_enable_flag == 1)
{
static float error = 0;
error = turn_target - fusion_data.euler.euler.yaw;
// 處理角度突變
if (error > 180.0f)
error -= 360.0f;
else if (error < -180.0f)
error += 360.0f;
angle_ring_speed_target = positional_pid_compute(
&car_angle_ring_pid, error, fusion_data.euler.euler.yaw);
}
else
{
turn_target = fusion_data.euler.euler.yaw;
angle_ring_speed_target = 0;
}
打開角度環后他就會保持Yaw為0,如下面這個圖一樣:
下面是設定他靠角度換旋轉90度的效果:

用位置環實現90度轉向
還是在pid_thread.c中實現:
在08_直流減速電機PID速度環與位置環調試已經可以讓輪子轉固定的脈沖(圈數)了,直接把對應的目標值加給電機1和電機2的位置目標就可以了。
// 位置式旋轉,負數左轉,正數右轉。
void car_spin_position(int32_t _position_target)
{
motor1_position_target += -_position_target; motor2_position_target -= _position_target;
}
在實際實現中,如下面的gif圖所示:
審核編輯 黃宇
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
電機
+關注
關注
142文章
9042瀏覽量
145750 -
PID
+關注
關注
35文章
1472瀏覽量
85605 -
開發板
+關注
關注
25文章
5081瀏覽量
97695
發布評論請先 登錄
相關推薦
ARM開發板與樹莓派的比較
ARM開發板和樹莓派都是基于ARM架構的單板計算機,它們在教育、工業控制、物聯網等領域有著廣泛的應用。 硬件配置 ARM開發板和樹莓派的硬件配置各有特點,具體取決于不同的型號和制造商。
自適應藍牙控制智能小車
基于野火Renesas R7FA8D1BH (Cortex?-M85)開發板,設計的一款智能控制小車。其可實現采集現場環境的溫度、濕度、光照強度,同時使用超聲波雷達掃描環境的參數,以了解特殊環境的地形特性
發表于 10-07 23:08
樹莓派和arm開發板的區別
樹莓派(Raspberry Pi)和ARM開發板都是基于ARM架構的微型計算機,但它們之間存在一些關鍵區別。 一、歷史背景 樹莓派(Raspberry Pi) 樹莓派是由英國樹莓
linux開發板與樹莓派的區別
定義和用途 Linux開發板:Linux開發板是一種基于Linux操作系統的嵌入式開發板,通常用于工業自動化、物聯網、智能家居等領域。 樹莓派:樹莓
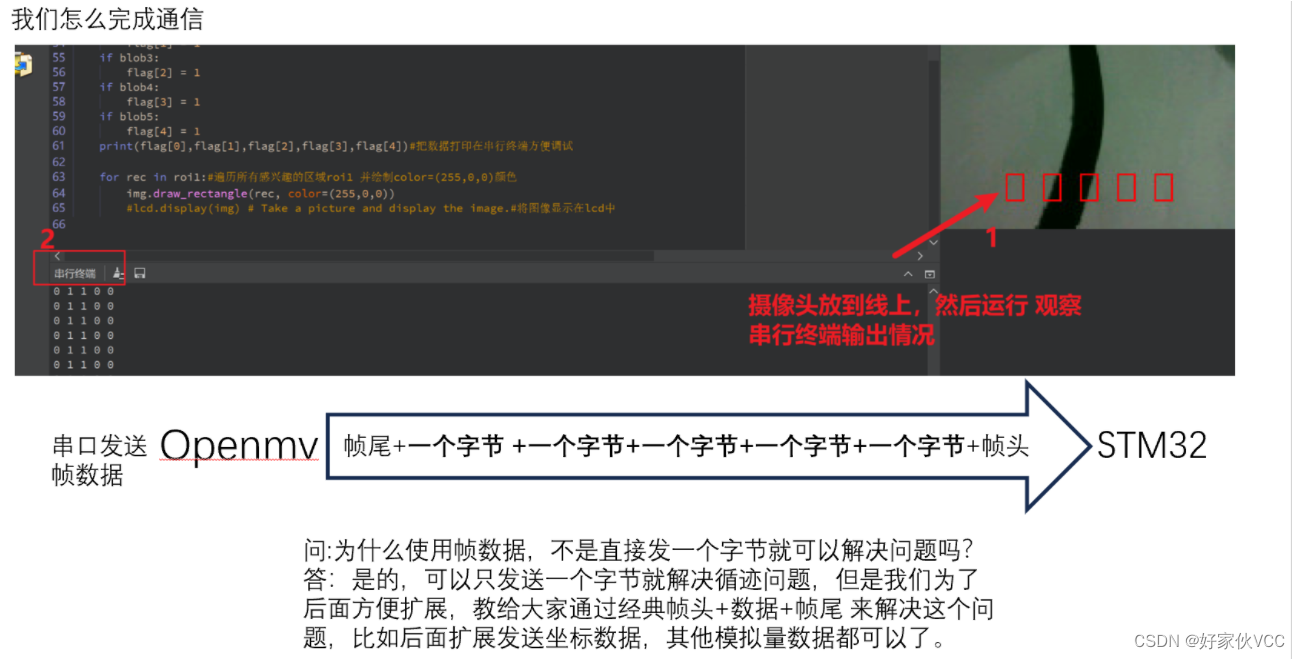
19.3-星曈科技 openmv Hopenmv發送五個uchar Openmv+STM32F103C8T6視覺巡線小車 STM32循跡小車系列教程
19.3-【星曈科技】openmv Hopenmv發送五個uchar Openmv+STM32F103C8T6視覺巡線小車 STM32循跡小車系列教程 使用OpenMV循跡 openMV尋跡與
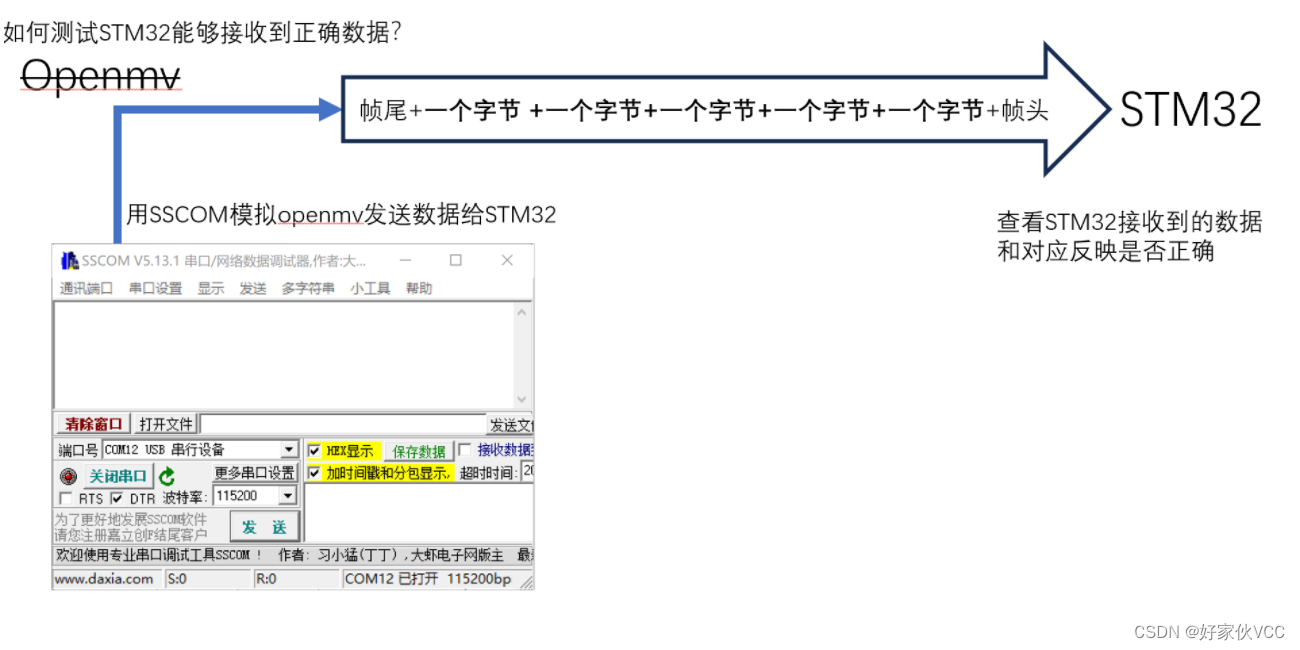
19.4-STM32接收數據-狀態顯示在屏幕 openMV尋跡與小車控制 Openmv+STM32F103C8T6視覺巡線小車
19.4-STM32接收數據-狀態顯示在屏幕 openMV尋跡與小車控制 Openmv+STM32F103C8T6視覺巡線小車
【核桃派ZeroW開發板體驗連載】核桃派ZeroW開發板拆箱、組裝、上電,
核桃派ZeroW開發板拆箱、組裝、上電
1.做工很精致,芯片很強大
2.自帶WIFI、藍牙、4K高清接口,TYPEC供電,彩屏驅動
3.可以用python、C、C++進行開發
4.自
發表于 08-09 11:08
【Vision Board創客營連載體驗】基于RA8D1-Vision Board的自動路徑規劃小車
電機和編碼器實現,大腦使用RA8D1-Vision Board開發板的openmv固件完成障礙識別和底盤移動控制,兩個部分使用串口進行通訊。
二、底盤:(1)底盤使用普通車輪以菱形布局,可實現類
發表于 06-18 15:33
【項目展示】基于CW32的遙控循跡小車
CW32循跡小車.zip_免費高速下載|百度網盤-分享無限制? 一、概述 CW32循跡、遙控小車具有循跡和遙控兩種功能,小車的硬件模塊由CW32F030C8T6小藍板、智能

AGV小車升降平臺控制板
簡介: 應用于控制AGV小車升降,推拉,勾取動作 應用場景: 升降裝置結構,AGV小車升降推拉裝置結構 1、產品介紹: 本產品是AGV小車升降平臺控制板,應用于控制AGV
用悟空派全志H3開發板做一個基于ROS系統的全向輪小車
這個強大的開發板的一些關鍵特性以及我是如何利用它來打造一個全向輪的小車的。
2、產品設計介紹
本次設計的全向輪小車是在一個圓形底盤上安裝了三個帶有反饋編碼器的全向輪,控制中心是悟空派
發表于 05-06 11:15
飛騰派開發板評測獲獎名單公布!!!
恭喜以上小伙伴!經過飛騰專家評選,前三名小伙伴可保留飛騰派開發板,其余小伙伴需退回開發板,有問題請微信聯系工作人員(微信號:elecfans123)
飛騰派
發表于 01-30 17:02
米爾電子和瑞薩電子推出首款MPU生態開發板瑞米派
近日,米爾電子和瑞薩電子共同定義和開發了瑞薩第一款MPU生態開發板——瑞米派(Remi Pi)正式上市了!在各種Pi板卡琳瑯滿目的當下,Remi Pi是一款與眾不同的開發板,它兼顧了嚴
【飛騰派4G版免費試用】飛騰派4G版開發板套裝測試及環境搭建
先簡單介紹一下這款飛騰派4G版開發板套裝;
飛騰派是由中電港螢火工場研發的一款面向行業工程師、學生和愛好者的開源硬件。主板處理器采用飛騰嵌入式四核處理器,兼容ARM V8架構,包含2個
發表于 01-22 00:47





 工商網監
工商網監
評論