 基于使用振動的觸覺反饋技術的運用可能性
基于使用振動的觸覺反饋技術的運用可能性
和偏心馬達的不同之處?超薄型Piezo(壓電)觸覺反饋設備
"PiezoHapt?執行器"是使用了振動的觸覺反饋技術及觸覺反饋等,擴大了VR可運用性的薄型振動模塊
觸覺反饋技術(Haptics)是指通過力度及振動等皮膚感覺反饋傳遞信息的技術。
"虛擬現實(VR)"這個詞語已耳熟能詳,VR要求通過接觸的感覺等觸覺,而非視覺或聽覺來傳遞信息的"觸覺反饋技術"。
TDK的 PiezoHapt?執行器是由積層壓電器件與振動板構成的薄型振動模塊,雖然其通過低電壓驅動,但可應對各類振動形式。與以往用于應對設備振動的偏心馬達或線性執行器(線性振動器)相比,本產品沒有安裝限制,可用于各類需要通過皮膚感覺進行反饋的應用。
降低耗電量的同時實現高效振動的PiezoHapt?執行器的原理與結構
PiezoHapt?執行器是將兩面安裝有電極的陶瓷壓電器件貼合在金屬板一面的單晶結構執行器。向電極中施加交流電壓時,壓電器件會發生伸縮,因此會使粘接的金屬板發生彎曲。其表現如下圖所示。通過交互變化附加電壓,金屬板會反復發生凸起、陷下彎曲,從而產生振動。通過采用該單晶結構可使整體金屬板高效振動。

壓電器件擁有單板與積層兩種形式,但PiezoHapt?執行器的壓電器件為積層型,因此與相同厚度的單板型器件相比,可產生更大的位移。為此,相比需要高電壓的普通壓電式觸覺反饋技術,TDK的PiezoHapt?執行器可通過24V的低電壓將振動感覺傳遞給皮膚。
同時,由于無需使用金屬線對器件進行焊接接合,因此無需對積層器件產生負荷便可提高振幅效率。
啟動速度為偏心馬達的1/25,同時可應對現有執行器所無法應對的多種振動形式
耗電量少于偏心馬達,可實時表現出細膩的振動
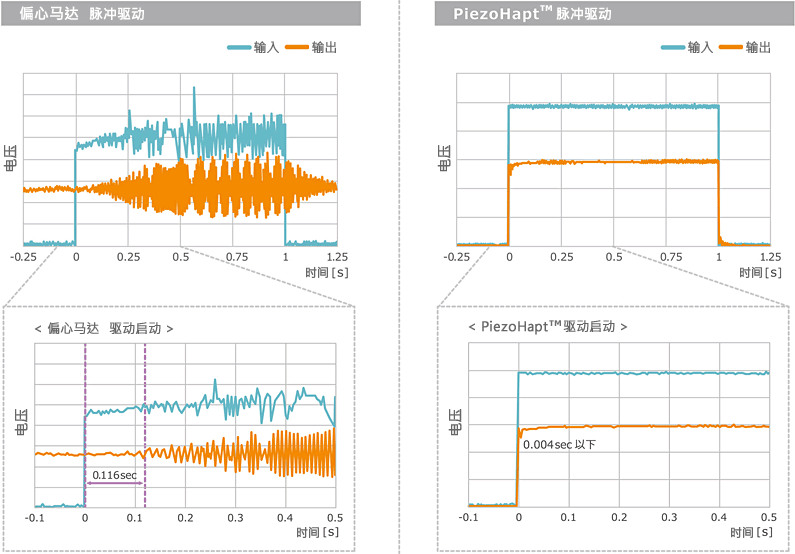
偏心馬達或線性執行器一般是用于振動器的執行器。但是,這些產品都存在響應速度慢的缺點。例如,在制造用手碰觸顯示器時能夠感受到凹凸感的設備時,其響應速度必須比現有執行器快。為此,實現更為先進的觸覺反饋技術仍面臨不少課題。
TDK的PiezoHapt?執行器可通過壓電特性實現瞬間響應。以下圖表為偏心馬達與PiezoHapt?驅動的比較。偏心馬達啟動需0.1秒以上,而PiezoHapt?執行器的啟動速度僅為其1/25。
同時,由于PiezoHapt?執行器相比偏心馬達可通過短時間通電進行運行,因此耗電量較少也是其特點之一。輸入的頻率或電壓越高,耗電量也會變大,但通過優化形成的振動可實現省電。
如以下圖表所示,可通過驅動電壓改變振幅的PiezoHapt?執行器可細膩地表現多種振動形式。
這是通過設計決定振幅的偏心馬達所無法實現的。
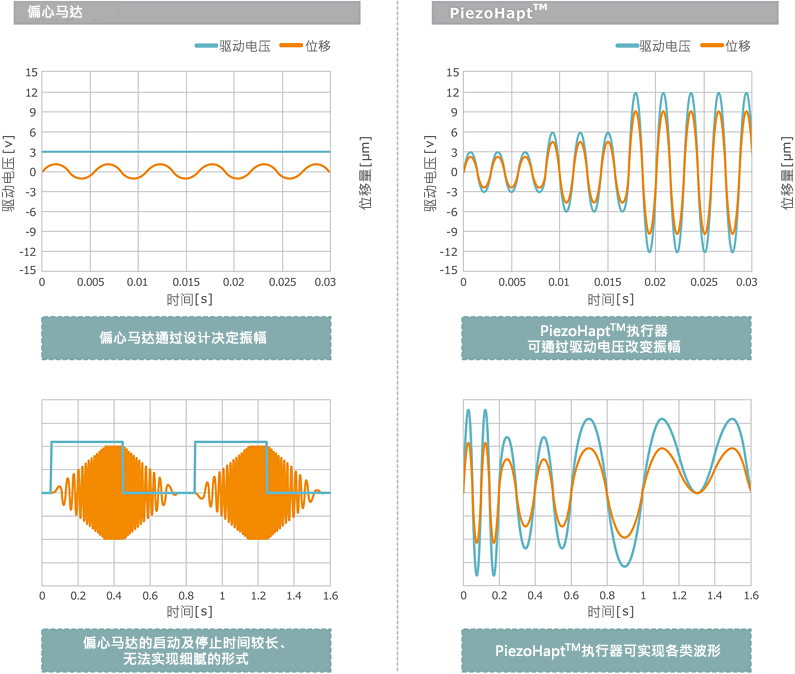
通過如此的快速響應以及振幅的自由變化,PiezoHapt?執行器可通過各種形式或位移形成對指尖的振動反饋,從而擴大觸覺反饋運用的可能性。
即使是遠離的部位,PiezoHapt?執行器也可將振動均勻傳遞
偏心馬達很難將振動傳遞至遠離安裝位置的部位,但PiezoHapt? 執行器可將振動均勻傳遞至整體。利用這一特點,可將強烈的振動傳遞至整個顯示器或觸摸屏。以下動畫所示為振動分布,從中可以發現,不僅是PiezoHapt? 執行器安裝位置周圍,其還可傳遞至更廣的范圍。除了形成均勻振動以外,其還能檢測碰觸指尖位置,并根據該位置改變振動。
偏心馬達
PiezoHapt?執行器
偏心馬達與TDK PiezoHapt?執行器的比較
下表為比較結果的總結。驅動電壓較高是壓電式的難點所在,但TDK的PiezoHapt?執行器通過使用積層器件克服了這一難點,由此實現了偏心馬達所無法實現的功能,并且進一步擴大了使用振動的觸覺反饋技術的運用可能性。
| 偏心馬達 | TDKPiezoHapt?執行器 | |
|---|---|---|
| 啟動* | 0.116秒 | 0.004秒以下 |
| 響應 | 慢 | 快 |
| 振動均勻性 | 傳遞部分振動 | 使希望振動的區域均勻振動 |
| 位移 | 中 | 大 |
| 振動形式 | 單調 | 通過脈沖控制形成振動 |
| 耗電量 | 15mWs | 5mWs |
*由TDK測量
主要用途
無論在何種領域,可用于穿戴設備、觸摸板、屏幕、 控制器等需要通過觸覺反饋技術進行反饋的各類設備中。
審核編輯:彭菁
-
顯示器
+關注
關注
21文章
4970瀏覽量
139926 -
馬達
+關注
關注
1文章
820瀏覽量
62269 -
執行器
+關注
關注
5文章
377瀏覽量
19347 -
觸覺反饋技術
+關注
關注
0文章
12瀏覽量
8230 -
驅動電壓
+關注
關注
0文章
79瀏覽量
13359
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論