


摘要:由于動力傳動系統的改變,電動汽車的懸架動態特性與傳統汽車不相同。本文以某電動汽車懸架系統相關參數為參考,在Matlab/Simulink環境中建立了四分之一車主動懸架模糊控制器。以車身垂直加速度、懸架彈簧動撓度以及輪胎動載荷等相關動態特性作為對電動車平順性和操縱穩定性影響的評價指標。仿真結果表明,具有模糊控制器的半主動懸架對電動車懸架動態特性的改善有良好的效果。
01 引言
目前應用于電動車懸架動態特性控制系統的控制理論比較多,主要有最優控制、預測控制、模糊控制、自適應控制、神經網絡控制以及復合控制等 [1] [2] [3] 。模糊控制由于不需要建立被控對象的精確數學模型,且對于非線性對象具有良好的Robust和高控制精度的特點,因而被廣泛的運用在改善電動汽車懸架動態特性上 [4] [5] 。劉靜構建了一種帶“天棚”阻尼的1/2車輛主動懸架系統,推導出基于LQR設計的該系統的動力學方程,為其他控制策略提供理想的參考模型 [6] 。美國加州大學的Abdel-Hady將模糊控制和LQR控制的半主動懸架進行對比發現:前者的車身加速度和懸架動行程較后者分別下降16%和18% [7] 。英國劍橋大學的Ruey-Jing Lian建立了基于自組織模糊控制的半主動懸架,并進行了控制試驗,結果表明該控制器有效降低了簧上質量加速度,對于懸架系統的平順性提升效果顯著 [8] 。合肥工業大學的陳杰平在半主動懸架模型基礎上,利用八板塊方法設計了整車的變論域控制策略。在隨機路面激勵的條件下,通過仿真和試驗研究發現:采用模糊變論域控制的半主動懸架相比于被動懸架的振動強度改善了9%~22% [9] 。
因此本文基于現代模糊控制理論,建立了主動模糊控制模型來驗證模糊控制對電動車懸架動態特性控制的有效性和適應性。
02 四分之一懸架模型的建立
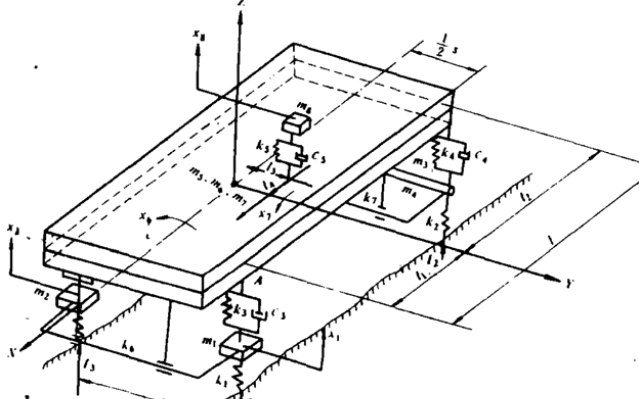
彈簧是表示力與位移關系的元件,在力學模型中,它被抽象成為無質量并具有線彈性的元件。阻尼器是表示力與速度關系的元件,在力學模型中,它被抽象成無質量且具有線性阻尼系數的元件。如圖1所示,本文采用二自由度1/4半主動懸架模型,利用牛頓第二定律建立如下運動微分方程:
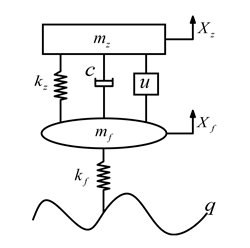
圖1 1/4車主動懸架模型

其中:mz為簧載質量,mz = 480 kg;mf為輪胎質量,mf = 40 kg;xz為車身垂向位移,單位米/m;xf為輪胎垂向位移,單位米/m;q為路面激勵位移,單位米/m;kz為懸架剛度,取kz = 15000 N/m;kf為輪胎剛度,取kf = 150000 N/m;為懸架阻尼系數,取c = 12000 N/(m/s);u為主動控制力,單位牛頓/N。
為了與路面8級分類標準對應,本文采用基于有理函數的路面不平度時域模型,B級路面標準,仿真速度為20 m/s,其時域數學模型可以用下式描述 [10]

式中,q(t)是車輪所受到的路面隨機激勵;v是汽車的行駛速度;w(t)是一白噪聲。a(1/m)是常系數,不同路面的參數估計值a的值為:B級路面a = 0.1303,C級路面a = 0.12。當車速為20 m/s時,路面不平度激勵仿真如圖2所示:
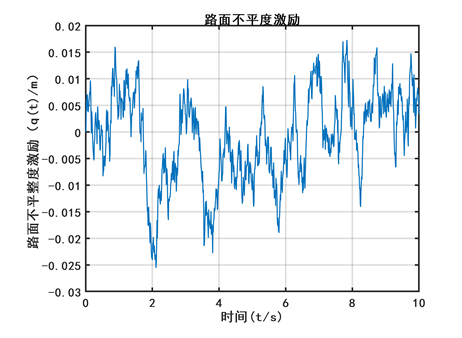
圖2 路面不平度激勵
03 模糊控制器的設計
模糊控制器設計主要包括選取控制器結構、選擇輸入和輸出變量的論域、制定控制規則及解模糊化策略等。本文選取誤差e為車身垂向速度,誤差ec為車身垂向速度變化速率即加速度,u為控制懸架系統的控制力。
由被動懸架仿真得到車身垂向速度變化范圍為[?0.15, 0.15],車身垂直加速度變化范圍為[?1.5, 1.5]。設輸入和輸出變量模糊集基本論域分別為:

使用速度變化量化因子Ke、加速度變化量化因子Kec與輸出控制力變化量化因子Ku來表征模糊集論域精確量模糊化的加權程度,經反復仿真試驗得:

其中:n、m分別為誤差e、ec的模糊集論域的邊界范圍;x為懸架系統需要的理論控制力,變化范圍為[?500,500]。模糊子集采用7個語言變量值[NB NM NS ZO PS PM PN]描述。建立表1所示的49條模糊控制規則。
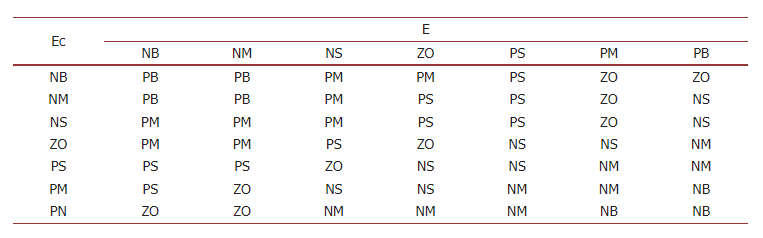
表1 模糊規則控制表
04 仿真分析
按標準ISO/TC 108/SC2N67中將路面不平度分為8級規定,本文采用B級路面,路面不平度系數平均值取64 × 10?6 m2,仿真車速為20 m/s,參考空間頻率為0.1 m?1,采樣頻率為0.01 Hz,仿真時間取10 s。在Simulink中建立1/4車主動懸架仿真模型,如圖3所示。車身垂向加速度、懸架動撓度、輪胎動載荷在不施加模糊控制力和施加模糊控制力兩種模式下的仿真結果對比如圖4~6所示。
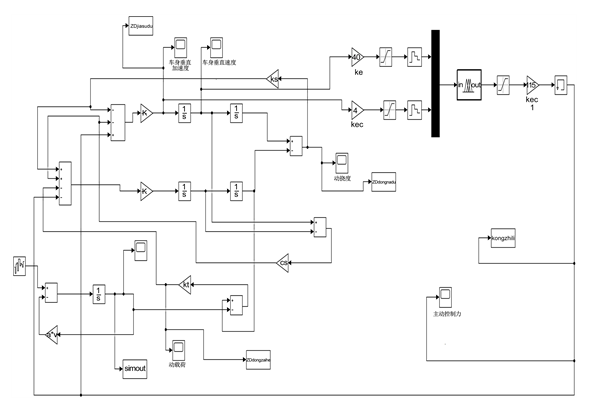
圖3 模糊控制Simulink仿真模型
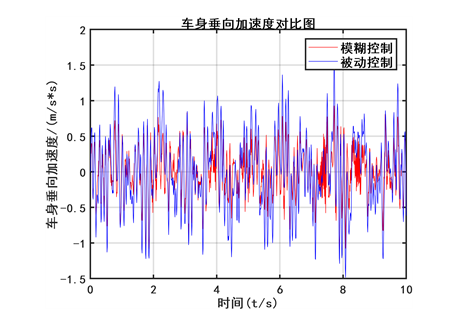
圖4 車身垂向加速度
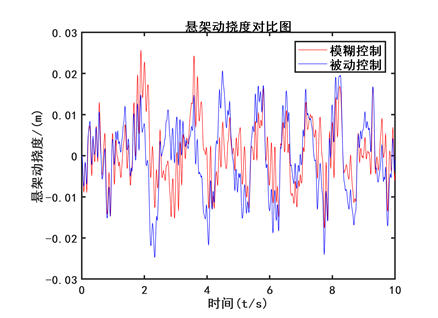
圖5 懸架撓度對比
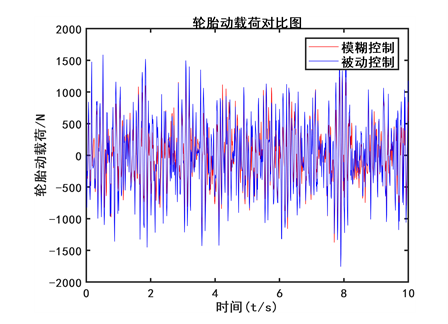
圖6 輪胎動載荷對比
依據兩種控制策略下車身垂向加速度、懸架動撓度和輪胎動載荷的時域圖及其均方根值(如表2所示)可知,采用模糊控制策略有效降低了車身垂向加速度、懸架動撓度、輪胎動撓度的幅值。

表2 平順性評價指標對比表
05 結論
1) 車輛行駛路面的不平度是隨機性的,本文以隨機白噪聲作為系統的輸入,來模擬隨機路面,和實際路況相符。
2) 本文采用模糊控制的策略建立了四分之一車輛半主動懸架模型,通過本文提出的模糊控制策略控制主動控制力的實時輸出,有效地改善了電動車懸架系統的的平順性和操縱穩定性。驗證了具有模糊控制器的半主動懸架對電動車懸架動態特性的改善有良好的效果。同時,模糊控制系統搭建簡便,使得半主動懸架系統的建立具有實際意義。
-
電動車
+關注
關注
73文章
3082瀏覽量
116167 -
仿真
+關注
關注
52文章
4297瀏覽量
135978 -
傳動系統
+關注
關注
2文章
149瀏覽量
15021
原文標題:電動汽車懸架動態特性仿真
文章出處:【微信號:智能汽車電子與軟件,微信公眾號:智能汽車電子與軟件】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
電動化趨勢下,汽車懸架發展
輪轂電機驅動電動汽車垂向動力學控制研究綜述
CA6440 半主動懸架研究及控制系統設計
電動汽車電機
用于汽車懸架系統壓力監測的P1602壓力傳感器
汽車懸架特性測控系統研究
基于計算機仿真的汽車懸架性能參數設計
電動汽車的懸架要求是不是要比燃油車高
電動汽車對于懸架的要求會不會比較高
轎車懸架最優減振特性及研究綜述





 工商網監
工商網監

評論