


Sensor banding現象(這種現象有時候也被成為Flicker現象)如視頻所示,畫面會出現頻閃,感覺有水波紋一樣的紋路在跳變;
具體來說可能會有如下表現(這些表現并不一定會同時出現):
同一幀的不同行的亮度各不相同,存在亮暗變化的條紋,如上圖所示;
不同幀的相同行的亮度不相同,出現視頻中水波紋一樣的紋路跳變;
前后幀的整體亮度存在差異,畫面亮度出現明顯的亮暗變化;
1-2、交流電變化規律
我們都知道交流電其實是一種正弦波,其頻率有兩種:50HZ和60HZ, 中國、泰國、印度、大部分歐洲國家等地采用50HZ,美國、加拿大、墨西哥等地采用60HZ。 下面以50HZ為例進行解釋,交流電以1/50s,即20ms的周期進行變化,其變化規律如圖所示:
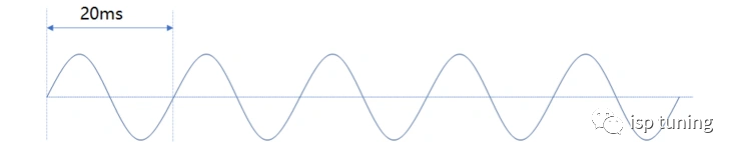
而對于能量來說,并沒有正負之分,因此能量的周期是1/100s,即10ms。

因此,普通的以交流電為電源的白熾燈的亮度實際上在一直在以10ms為周期隨著交流電變化而發生變化,只不過人眼感知不到畫面亮度的變化罷了。
1-3、卷簾快門(Rolling shutter)
常見圖像傳感器Sensor有卷簾快門和全局快門之分:
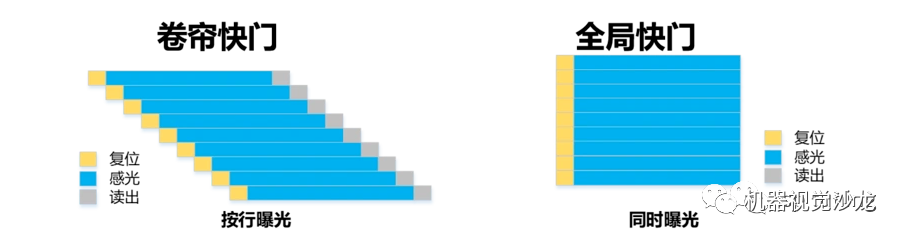
卷簾快門的特點是Sensor是一行一行進行感光的,并不是同時感光的,這就導致了不同行之間感光的時刻存在差異,
而感光的過程可以看成是對亮度進行積分,積分的大小直接決定了畫面亮度。
如果在感光過程外界燈光亮度發生了變化就可能導致不同行感應到的亮度有差異,導致了banding現象,下面具體進行分析。
1-4、對不同filker現象的原因分析
對同一幀內的不同行進行分析
1>、曝光時間為10ms時
如圖所示,假如第M行和第N行分別在 tm 和? tn 時刻開始曝光,曝光時間為都10ms,圖中陰影部分的面積就表示該行的亮度
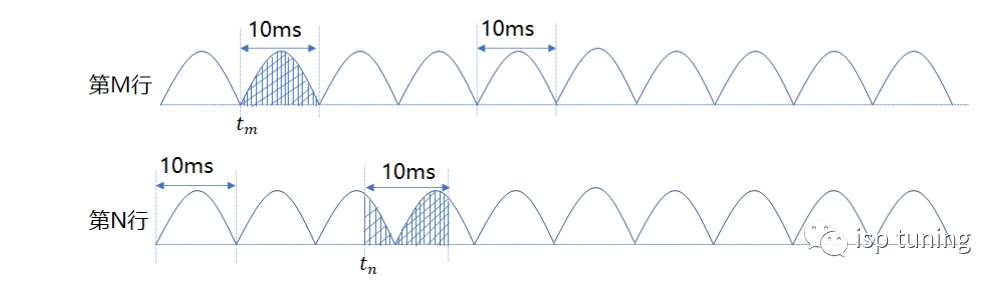
我們知道第M行的積分面積與第N行的積分面積是相同的,因為積分時間剛好是周期的整數倍,此時不同行的亮度是相同的,不會產生banding現象。
2>、曝光時間為8ms時
如圖所示,假如第M行和第N行分別在 ?tm 和 tn ?時刻開始曝光,曝光時間為都8ms,圖中陰影部分的面積就表示該行的亮度
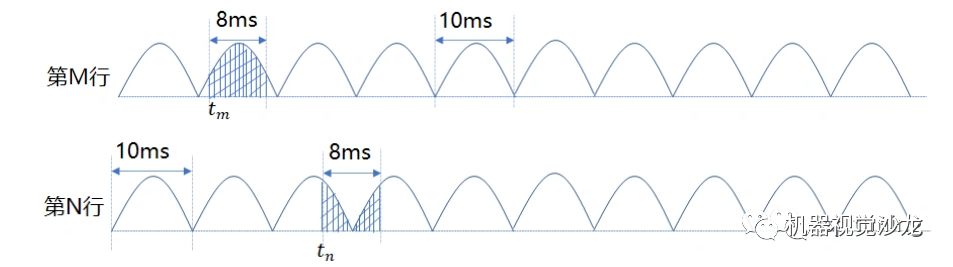
我們可以看出來第M行的積分面積(跨越波峰)大于第N行的積分面積(跨越波谷),
因此這兩行的亮度就會有差異,在當前幀中就會出現不同行亮度不同的水波紋現象。
我們可以看出來第M行的積分面積(跨越波峰)大于第N行的積分面積(跨越波谷),
因此這兩行的亮度就會有差異,在當前幀中就會出現不同行亮度不同的水波紋現象。
對不同幀的同一行進行分析
1>、假設,第M幀的第N行在 tm 時刻開始曝光, 第M+1幀的第N行會在tm+1時刻開始開始曝光,
如果此時的幀率為30FPS,每幀時間為為1/30s?,即33ms。我們可以知道:tm+1 = tm+33ms
曝光時間為10ms時

如圖所示,此時我們會發現,這兩行的亮度是一樣的,因此不同幀的亮度也是相同的,即畫面亮度不會出現閃爍跳變;
2>、曝光時間為8ms時
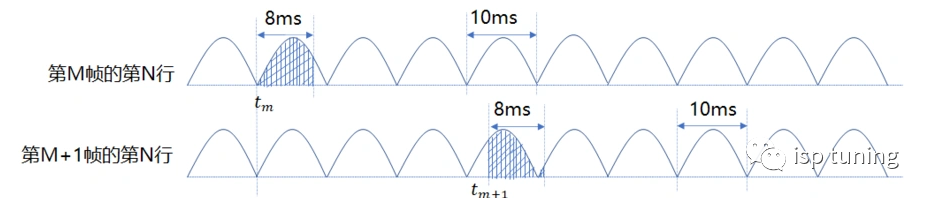
如圖所示,第M幀的第N行的積分面積要大于第M+1幀的第N行的積分面積(經過谷底),此時不同幀的相同行亮度也會發生表現,
加上上面的分析,我們可以得知,在30FPS情況下,以8ms進行曝光時不僅會出現水波紋,而且水波紋還會滾動,出現上面視頻中的表現。
3>、但是,如果此時以25FPS的幀率進行分析,每幀為1/25s,即40ms時,情況會變得不一樣,此時:tm+1 = tm + 40ms

如圖所示,由于40ms為周期10ms的整數倍,因此這兩行的起始時刻相位是相同的,所以兩行的積分面積是相同的,因此此時不會出現畫面閃爍。
1-5、小結
這里可以給出結論:
當曝光時間為光源能量周期的整數倍時,不會出現banding現象;
當曝光時間不為光源能量周期的整數倍時,一定會出現不同行之間的亮度差異,即水波紋一樣現象;但是水波紋會不會上下滾動還要看幀率;
當每幀時間(1/fps)為光源能量周期的整數倍時,不同幀之間的相同行不會出現亮度變化,即哪怕有水波紋也不會滾動,;反之水波紋會上下滾動;
1-6、 led燈的banding現象
分析完了普通白熾燈這些直接隨交流電的頻率進行亮度變化的燈,還有一類特殊的燈的banding現象與白熾燈不同,那就是LED燈,
因為LED并不是是隨著交流電的頻率變化的而是自身控制的,LED燈的頻率并不固定,一般來說在90HZ~200HZ,不同的LED燈有不同的頻率,
如圖所示燈是90HZ(11.1ms),占空比為20%, 的LED亮暗示意圖,當電平為高時LED燈亮起,當電平為低時,LED燈熄滅,
因此這里我們也可以看到為什么LED會節能呢?因為它大部分時間都不亮。
注:一個頻率波形有信號與無信號的比值叫占空比 ;

那對于圖像傳感器來說,LED與普通白熾燈有什么區別呢?
白熾燈其實是一直亮著的,但是LED燈的大部分時間是滅的,因此采集圖像時有可能會采集到LED燈滅掉的時刻,
比如ADAS相機如果采集到的紅綠燈是滅的,那么ADAS算法也無法判斷當前應該是停車還是直接走;
交流電的頻率是固定的,要么50HZ,要么60HZ;但是LED燈的頻率沒有具體標準,
比如頻率很低的警車上鳴笛的那個紅藍信號燈頻率可以低到5HZ,而高頻的LED燈可以達到200HZ,并沒有一個固定的頻率;
不過,分析方式是一樣的,每一行的亮度取決于在該行曝光時間內的外界亮度的積分。這里以90HZ,占空比為20%的LED燈為例進行分析,
因為在車載領域,對LED banding有要求的也是大于90HZ的LED燈下無明顯的頻閃和水波紋。
2、過曝、曝光不足
調試過程:排除其他模塊對亮度的影響(比如gamma、ltm、對比度等)確認是否是曝光參數導致的畫面欠曝,過曝;
可 bypass 除ae外影響亮度的所有模塊后,再去調整AE相關的曝光參數,使畫面曝光正常;
3、AE震蕩、亮度不一致、圖像清晰度差
3-1、AE震蕩
現象:圖像亮度忽明忽暗
調試過程:查看當前實時曝光參數(曝光行、sensor again、isp gain),確認具體是哪個參數一直在變化 ;
嘗試調整AE的相關控制參數 (曝光量、閾值、容錯值、權重。。。),直到在該場景下,AE計算出的曝光參數值穩定為止;
若是isp gain導致,可以適當調整isp gain的值,或者當亮度滿足要求時,直接不用isp gain也可;
3-2、同場景下圖像亮度不一致問題
現象:當前環境亮度不變,假設為600lux,當將環境亮度從2lux調整到600lux 和從1000lux 調整到600lux兩次對比,camera畫面亮度不一致;
調試過程:比較兩次的600lux場景下,計算出的曝光參數是否一致,若一致那就不是AE的問題;
可能和AE精度相關,可調小AE的容差值看看,但可能會帶來AE震蕩,根據實際需求去做調整;
3-3、圖像清晰度差問題
現象:基于上面3-2的場景下,圖像的清晰度有差異;
調試過程:確認兩次的實時曝光參數值,一般是不在同一檔的增益下了,下一檔的去噪參數開的較大,清晰度就差了;
或者是兩檔增益的去噪參數值調的差距較大,不夠線性 ;
4、曝光時間過長,導致的運動拖影問題
運動物體整個運行過程都是在cmos上成像的,所以當曝光時間長時,拍出的照片就有拖影,
只有當曝光時間足夠快,物體相對于相機就是相對靜止的,也就看不到有拖影了;
來源丨ISP Tuning
審核編輯:劉清
-
led燈
+關注
關注
22文章
1596瀏覽量
109798 -
圖像傳感器
+關注
關注
68文章
1983瀏覽量
130768 -
FPS
+關注
關注
0文章
35瀏覽量
12212 -
交流電
+關注
關注
14文章
680瀏覽量
34835 -
ADAS系統
+關注
關注
4文章
228瀏覽量
26113
原文標題:自動曝光相關問題分析
文章出處:【微信號:機器視覺沙龍,微信公眾號:機器視覺沙龍】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
DLP6500FYE所支持的曝光時間范圍為多少?
555組成的自動曝光定時電路
淺析自動水分測定儀的特點
如何用labview修改一個攝像頭的曝光時間
【威雅利 汽車】蘋果最新專利曝光,要把VR和AR帶進自動駕駛汽車
CCD半自動曝光機系統,自動對位操作簡單
相片曝光定時器相關資料下載
深圳CCD半自動曝光機系統有哪些特點及參數?
淺析影響白光LED光衰的相關材料
淺析運放補償電容的作用及相關知識





 工商網監
工商網監

評論