標(biāo)定概述
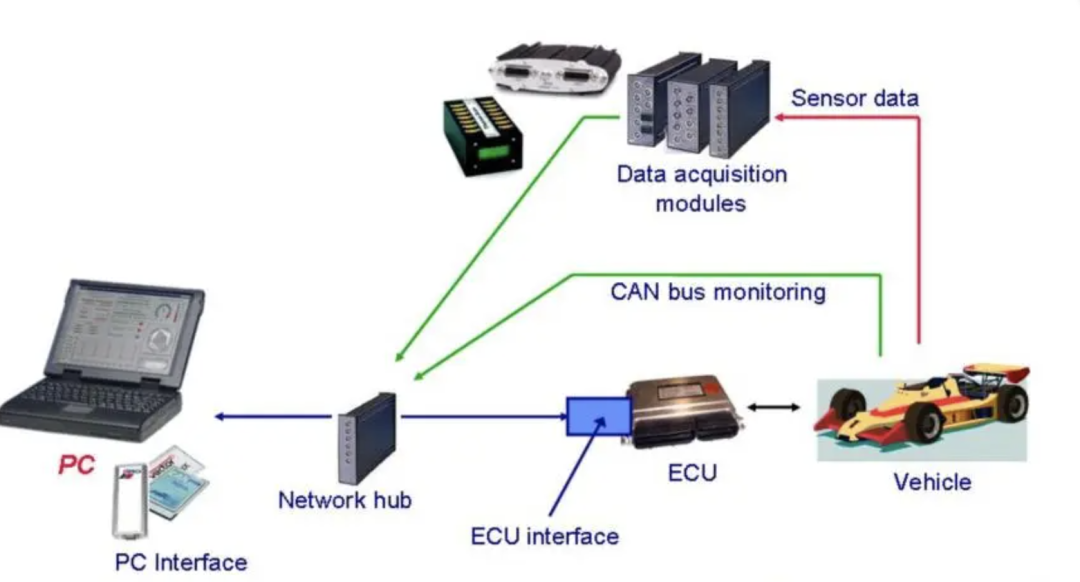
我們先看一張圖,做過調(diào)試的同學(xué)額應(yīng)該很熟悉,出問題了,要實(shí)車調(diào)試,我們帶著電腦和canoe下去調(diào)試了。只不過這張圖是講標(biāo)定的,我們通過can或者以太網(wǎng)接口卡,把標(biāo)定參數(shù)刷到我的Ecu中,我們的Ecu采集數(shù)據(jù)到遠(yuǎn)程服務(wù)器供我們分析我們調(diào)參的好壞。
那么什么是調(diào)參呢?
調(diào)參就是優(yōu)化或調(diào)整控制算法中的某些參數(shù)以獲得系統(tǒng)最佳效果的過程。我們通過校準(zhǔn)工具(比如網(wǎng)絡(luò)接口卡can盒子和canape)訪問 ECU中的校準(zhǔn)變量并進(jìn)行更改,注意我們要校準(zhǔn)的那些參數(shù)都被分組到 ECU 內(nèi)存的一個(gè)特殊部分,稱為校準(zhǔn)內(nèi)存。我們通過校準(zhǔn)工具來訪問這塊內(nèi)存。
標(biāo)定協(xié)議
那么校準(zhǔn)工具肯定要通過某種協(xié)議來訪問這塊內(nèi)存,我們稱這種協(xié)議為XCP(CAN Calibration
Protocol)協(xié)議,基于can總線的就叫ccp。顧名思義,它是一種用于電子控制單元(ECU)的校準(zhǔn)和數(shù)據(jù)采集的協(xié)議。
CCP 是 CAN 2.0B(11 位或 29 位 CAN id)的應(yīng)用層。根據(jù) OSI 模型,該協(xié)議是頂層(第 7層),這意味著該協(xié)議不描述位和字節(jié)是如何創(chuàng)建的,而是使用 CAN 2.0B 協(xié)議物理層、數(shù)據(jù)鏈路層和網(wǎng)絡(luò)層。

聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
相關(guān)推薦
在機(jī)器視覺中,怎么標(biāo)定坐標(biāo)原點(diǎn)啊,我用的圖像匹配可以標(biāo)定一個(gè)坐標(biāo)原點(diǎn),但是在不同的圖像上會(huì)有偏移,怎么才能減小偏移呢。求大家指教一下
發(fā)表于 01-18 15:53
自動(dòng)駕駛車輛中的AI分析車輛中的AI應(yīng)用
發(fā)表于 03-09 07:53
概述在新能源汽車測(cè)試領(lǐng)域中,新能源汽車的驅(qū)動(dòng)電機(jī)控制電流需要進(jìn)行臺(tái)架標(biāo)定,目前電機(jī)臺(tái)架標(biāo)定中控制電流的標(biāo)定是通過手動(dòng)方式進(jìn)行的,手動(dòng)
發(fā)表于 08-27 06:01
提出了基于平面單應(yīng)性矩陣的攝像機(jī)標(biāo)定算法,通過攝像機(jī)標(biāo)定對(duì)檢測(cè)區(qū)域進(jìn)行網(wǎng)格劃分,從而進(jìn)行車輛速度的檢測(cè)。經(jīng)實(shí)驗(yàn)測(cè)試,該方法易于實(shí)現(xiàn),且具有較高的檢測(cè)精度,平均測(cè)速準(zhǔn)確率
發(fā)表于 11-10 14:35
?51次下載
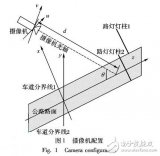
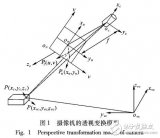
利用快速標(biāo)定模型進(jìn)行了車載成像裝置的標(biāo)定,研究了基于導(dǎo)引標(biāo)志的車輛位置和方向參數(shù)提取,其中改進(jìn)了一種基于透視變換提取車輛位置方向的方法,即利用圖像中
發(fā)表于 02-08 15:46
?31次下載

針對(duì)目前基于視頻的車輛測(cè)速方法均需通過手工標(biāo)定而造成的低效和可操作性差的問題,提出了一種對(duì)典型配置的道路監(jiān)控?cái)z像機(jī)的焦距、俯仰角、離地距離等重要參數(shù)進(jìn)行自動(dòng)標(biāo)定的方法。首選利用自然場(chǎng)景中
發(fā)表于 11-29 16:47
?0次下載
針對(duì)無人車(UGV)自主跟隨目標(biāo)車輛檢測(cè)過程中需要對(duì)激光雷達(dá)(LiDAR)數(shù)據(jù)和攝像機(jī)圖像進(jìn)行信息融合的問題,提出了一種基于梯形棋盤格標(biāo)定板對(duì)激光雷達(dá)和攝像機(jī)進(jìn)行聯(lián)合標(biāo)定的方法。首先,
發(fā)表于 11-30 16:23
?7次下載
相機(jī)標(biāo)定可以說是計(jì)算機(jī)視覺/機(jī)器視覺的基礎(chǔ),但是初學(xué)者不易上手,本文將給讀者整理一遍相機(jī)標(biāo)定的邏輯,并在文末回答評(píng)論區(qū)提出的問題。分為以下內(nèi)容:
![的頭像]() 發(fā)表于
發(fā)表于 06-01 09:54
?4331次閱讀

在實(shí)際控制中,相機(jī)檢測(cè)到目標(biāo)在圖像中的像素位置后,通過標(biāo)定好的坐標(biāo)轉(zhuǎn)換矩陣將相機(jī)的像素坐標(biāo)變換到機(jī)械手的空間坐標(biāo)系中,然后根據(jù)機(jī)械手坐標(biāo)系計(jì)算出各個(gè)電機(jī)該如何運(yùn)動(dòng),從而控制機(jī)械手到達(dá)指
![的頭像]() 發(fā)表于
發(fā)表于 08-28 11:42
?1.2w次閱讀

xCAL是一個(gè)基于模型的標(biāo)定軟件,它將FEV的標(biāo)定工程經(jīng)驗(yàn)集成到易于使用的工具中。該軟件使得強(qiáng)大的DoE技術(shù)易于應(yīng)用,并結(jié)合車輛開發(fā)的需要,針對(duì)通用DoE方法進(jìn)行了定制化的調(diào)整。
![的頭像]() 發(fā)表于
發(fā)表于 06-17 16:36
?3282次閱讀
在實(shí)際控制中,相機(jī)檢測(cè)到目標(biāo)在圖像中的像素位置后,通過標(biāo)定好的坐標(biāo)轉(zhuǎn)換矩陣將相機(jī)的像素坐標(biāo)變換到機(jī)械手的空間坐標(biāo)系中,然后根據(jù)機(jī)械手坐標(biāo)系計(jì)算出各個(gè)電機(jī)該如何運(yùn)動(dòng),從而控制機(jī)械手到達(dá)指
![的頭像]() 發(fā)表于
發(fā)表于 08-18 15:54
?6970次閱讀
由于OpenCV中cvStereoCalibrate總是會(huì)得到很夸張的結(jié)果(見下文5.1問題描述),所以最后還是決定用Bouguet的Matlab標(biāo)定工具箱立體標(biāo)定,再將標(biāo)定的結(jié)果讀入
![的頭像]() 發(fā)表于
發(fā)表于 03-21 10:17
?1075次閱讀
本文采用了一種從粗到精的方法,在車輛行駛在道路上時(shí),通過因子圖優(yōu)化獲取地面特征并優(yōu)化相機(jī)到地面的標(biāo)定參數(shù),而無需使用任何特定的標(biāo)定目標(biāo)。
發(fā)表于 06-20 09:36
?622次閱讀
在初期階段,一般需要維護(hù)測(cè)試車輛的標(biāo)定,支持一些特定的標(biāo)定需求,比如沒有車輛的古老數(shù)據(jù)的標(biāo)定,在標(biāo)定
發(fā)表于 07-28 15:24
?516次閱讀

常見的機(jī)器人視覺伺服中要實(shí)現(xiàn)像素坐標(biāo)與實(shí)際坐標(biāo)的轉(zhuǎn)換,首先就要進(jìn)行標(biāo)定,對(duì)于實(shí)現(xiàn)視覺伺服控制,這里的標(biāo)定不僅包括攝像機(jī)標(biāo)定,也包括機(jī)器人系統(tǒng)的手眼標(biāo)
發(fā)表于 08-04 11:48
?857次閱讀

") 車輛中的標(biāo)定概述
車輛中的標(biāo)定概述





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論