


送藥小車代碼倉(cāng)庫(kù):https://gitee.com/lcsc/medical_car
更好的觀看體驗(yàn)請(qǐng)去:12_K210的KPU數(shù)字識(shí)別訓(xùn)練
送藥小車立創(chuàng)開(kāi)源平臺(tái)資料:https://oshwhub.com/li-chuang-kai-fa-ban/21-dian-sai-f-ti-zhi-neng-song-yao-xiao-che
K210的KPU數(shù)字識(shí)別訓(xùn)練
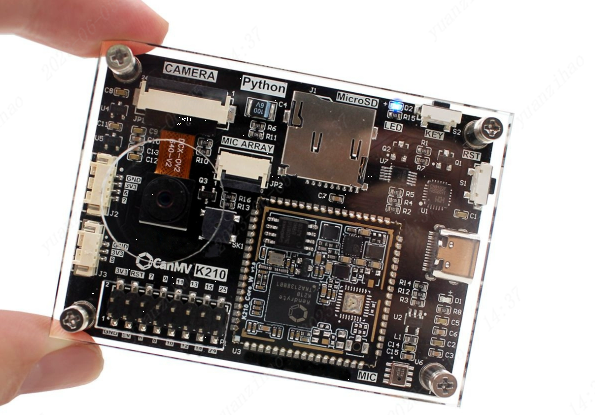
K210自帶 KPU(通用的神經(jīng)網(wǎng)絡(luò)處理器),非常適合用來(lái)作數(shù)字識(shí)別。要采集的數(shù)據(jù)集圖像尺寸為 224*224(這是目前最常用的網(wǎng)絡(luò)數(shù)據(jù)大小),為了讓結(jié)果更準(zhǔn)確,所以要訓(xùn)練的數(shù)據(jù)集要盡可能多,每種數(shù)字的數(shù)據(jù)量盡可能相等。但 k210 的算力也是有限的,他所能運(yùn)行的模型也是有限的,對(duì)于 k210:運(yùn)行 c 代碼時(shí)最大可以加載 6MB 左右的模型,運(yùn)行 maixpy 的最小固件時(shí),能加載 3MB 左右的模型,運(yùn)行 maixpy 的最大固件時(shí),能夠加載約 2MB 左右的模型。(值得注意的一點(diǎn),模型大小和數(shù)據(jù)集沒(méi)有必然關(guān)系,所以不用擔(dān)心數(shù)據(jù)集采集太多導(dǎo)致K210的內(nèi)存裝載不下的問(wèn)題,選好Alpha參數(shù)就能確定模型的大小)
簡(jiǎn)單來(lái)說(shuō),實(shí)現(xiàn)K210的數(shù)字識(shí)別就是三步:
采集數(shù)據(jù)集
對(duì)數(shù)據(jù)集進(jìn)行標(biāo)注
開(kāi)始訓(xùn)練并得到
采集數(shù)據(jù)集
因?yàn)槲覀冞\(yùn)算是在 K210 本地的,圖像來(lái)源也是 K210 自帶的攝像頭,為了讓結(jié)果更準(zhǔn)確,可以用 python 編寫一個(gè) K210 的拍照程序,采集固定的 224*224 圖像并保存到 TF 卡里面。最好是搭好小車框架后,選好攝像頭的安裝位置和角度,將拍照程序保存到 K210 的運(yùn)行 sd 卡里面。當(dāng)按下按鈕的時(shí)候就進(jìn)行當(dāng)前圖像的保存。
拍照的代碼如下所示(具體代碼在2_Code->application->sensor->k210->pyconde-take_picture.py):
import sensor, image, time, lcd, struct, ustruct, _thread from maix import KPU,GPIO, I2S, FFT import gc,os from machine import Timer,PWM,I2C from fpioa_manager import fm lcd.init() # Init lcd display lcd.clear(lcd.RED) # Clear lcd screen. sensor.reset() # Reset and initialize the sensor. sensor.reset(freq=24000000, dual_buff=1) # 設(shè)置攝像頭頻率 24M 開(kāi)啟雙緩沖模式 會(huì)提高幀率 但內(nèi)存占用增加 sensor.set_auto_exposure(1) # 設(shè)置自動(dòng)曝光 sensor.set_auto_gain(False) # 顏色跟蹤必須關(guān)閉自動(dòng)增益 sensor.set_auto_whitebal(False) # 顏色跟蹤必須關(guān)閉白平衡 sensor.set_pixformat(sensor.RGB565) # Set pixel format to RGB565 (or GRAYSCALE) sensor.set_framesize(sensor.QVGA) # Set frame size to QVGA (320x240) sensor.set_windowing((224,224)) # 分辨率為B224X224 sensor.set_vflip(1) sensor.skip_frames(time = 2000) # Wait for settings take effect. clock = time.clock() # Create a clock object to track the FPS. #要拍攝不同的數(shù)字就切換這里的數(shù)字 need_number_ficture= 1 #保存文件名計(jì)數(shù) save_count =0 #注冊(cè)IO,注意高速GPIO口才有中斷 fm.register(35, fm.fpioa.GPIO0) fm.register(16, fm.fpioa.GPIOHS0) #構(gòu)建案件對(duì)象 KEY=GPIO(GPIO.GPIOHS0, GPIO.IN, GPIO.PULL_UP) #按鍵標(biāo)志位 key_node = 0 key_press_long = 0 #中斷回調(diào)函數(shù) def fun(KEY): global state,key_node,need_number_ficture temp_count = 0 time.sleep_ms(10) #消除抖動(dòng) while KEY.value()== 0: key_node = 1 time.sleep_ms(10) #長(zhǎng)按延時(shí) #長(zhǎng)按檢測(cè)計(jì)數(shù) temp_count=temp_count+1 if temp_count >= 50: key_node = 0 beep.duty(50) time.sleep_ms(500) beep.duty(0) time.sleep_ms(100) need_number_ficture=need_number_ficture+1 if(need_number_ficture == 9): need_number_ficture=0 #開(kāi)啟中斷,下降沿觸發(fā) KEY.irq(fun, GPIO.IRQ_FALLING) #先把文件路徑切換到文件卡里面 os.chdir("/sd") #os.mkdir("img/0") #os.mkdir("img/1") #os.mkdir("img/2") #os.mkdir("img/3") #os.mkdir("img/4") #os.mkdir("img/5") #os.mkdir("img/6") #os.mkdir("img/7") #os.mkdir("img/8") #PWM通過(guò)定時(shí)器配置,接到IO15引腳 tim = Timer(Timer.TIMER0, Timer.CHANNEL0, mode=Timer.MODE_PWM) beep = PWM(tim, freq=1000, duty=0, pin=9) clock = time.clock() # 創(chuàng)建一個(gè)clock對(duì)象,用來(lái)計(jì)算幀率 while True: clock.tick() # 更新計(jì)算幀率的clock img=sensor.snapshot() #按鍵按下進(jìn)入 if key_node == 1: save_count=save_count+1 img.save("img/"+str(need_number_ficture)+"/"+str(save_count)+".jpg") beep.duty(50) time.sleep_ms(100) beep.duty(0) time.sleep_ms(100) key_node = 0 #清除按鍵標(biāo)志位 # 在圖像上畫(huà)字符串 img.draw_string(0, 10,str(need_number_ficture)+"/"+str(save_count)+".jpg", color = (200, 0, 0), scale = 2, mono_space = False, char_rotation = 0, char_hmirror = False, char_vflip = False, string_rotation = 0, string_hmirror = False, string_vflip = False) lcd.display(img)
下面來(lái)解釋一下上面這段代碼做了什么:
導(dǎo)入必要的庫(kù):導(dǎo)入需要的庫(kù)和模塊(就像C語(yǔ)言的.h頭文件一樣),如sensor, image, time, lcd, GPIO, Timer, PWM, I2C等。
初始化LCD屏幕:使用lcd.init()初始化LCD屏幕,并使用lcd.clear(lcd.RED)清空屏幕,防止出現(xiàn)誤顯示問(wèn)題。
設(shè)置攝像頭:使用sensor.reset()重置攝像頭并進(jìn)行初始化。然后,設(shè)置攝像頭的相關(guān)參數(shù),比如時(shí)鐘頻率、設(shè)置雙緩沖來(lái)增加幀率,關(guān)閉自動(dòng)曝光、關(guān)閉自動(dòng)增益、關(guān)閉自動(dòng)白平衡、設(shè)置像素格式、幀大小、窗口大小、垂直翻轉(zhuǎn)(這個(gè)和用的攝像頭有關(guān))等。
初始化變量:初始化必要的變量,如當(dāng)前拍攝的數(shù)字(need_number_ficture)、保存計(jì)數(shù)(save_count)、按鍵標(biāo)志位(key_node)等。
設(shè)置GPIO和按鍵中斷:注冊(cè)GPIO,并創(chuàng)建一個(gè)按鍵對(duì)象KEY。定義一個(gè)中斷回調(diào)函數(shù)fun(KEY),用于在按鍵按下時(shí)改變當(dāng)前拍攝的數(shù)字。最后,配置按鍵中斷,使其在下降沿觸發(fā)。
設(shè)置蜂鳴器:使用Timer和PWM初始化蜂鳴器,并連接到指定的引腳。
主循環(huán):在主循環(huán)中,首先更新幀率計(jì)算的clock。然后,從攝像頭捕獲一幀圖像。如果按鍵被按下(key_node為1),則將當(dāng)前幀圖像保存到SD卡的相應(yīng)目錄(對(duì)應(yīng)于當(dāng)前拍攝的數(shù)字)。同時(shí),蜂鳴器發(fā)出提示音(提示我們拍照OK了)。最后,在圖像上繪制當(dāng)前拍攝數(shù)字和已保存的圖片計(jì)數(shù),并將圖像顯示在LCD屏幕上,方便提示我們拍攝下一張照片。
對(duì)數(shù)據(jù)集進(jìn)行標(biāo)注
這個(gè)就需要用到一個(gè)大神開(kāi)發(fā)的軟件了(現(xiàn)在最新版自帶Python環(huán)境,無(wú)需麻煩的環(huán)境配置了),下載地址,找下面的百度網(wǎng)盤下載鏈接,找到里面的V4.0.0下載下來(lái)安裝后就可以使用了。用讀卡器把 K210的TF 卡里面采集到的訓(xùn)練集保存到電腦上。
打開(kāi)Mx-yolo里面工具集中的圖片標(biāo)注助手,打開(kāi)保存采集數(shù)據(jù)的文件夾。詳細(xì)教程請(qǐng)查看這個(gè)鏈接。
開(kāi)始訓(xùn)練
訓(xùn)練可以選在線的也可以用本地的,但是如果像是電賽這種時(shí)間很緊張的比賽,為了防止到時(shí)候千軍萬(wàn)馬過(guò)獨(dú)木橋,導(dǎo)致你的訓(xùn)練任務(wù)一直在排隊(duì),最好先設(shè)置好自己的本地環(huán)境。按照上面的介紹安裝mx-yolo。
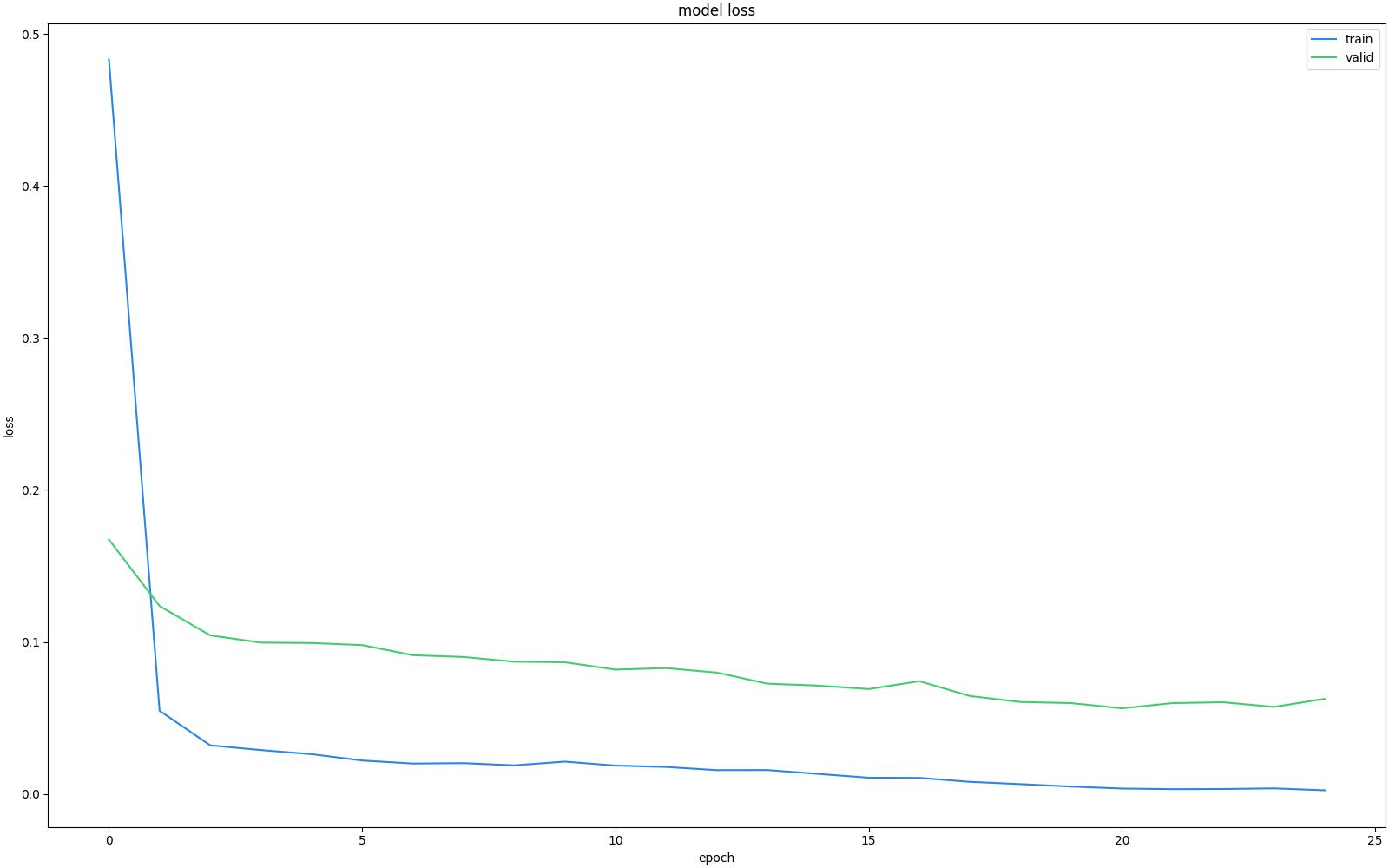
模型訓(xùn)練的次數(shù)需要在保證模型收斂的前提下進(jìn)行合理的選擇。如果訓(xùn)練次數(shù)過(guò)少,可能會(huì)導(dǎo)致模型欠擬合,無(wú)法很好地?cái)M合訓(xùn)練數(shù)據(jù)。如果訓(xùn)練次數(shù)過(guò)多,可能會(huì)導(dǎo)致模型過(guò)擬合,無(wú)法很好地泛化到新的數(shù)據(jù)。因此,需要根據(jù)具體的問(wèn)題和數(shù)據(jù)集進(jìn)行調(diào)整。一般來(lái)說(shuō),可以通過(guò)觀察模型在訓(xùn)練集和驗(yàn)證集上的表現(xiàn)來(lái)確定合適的訓(xùn)練次數(shù)。當(dāng)模型在驗(yàn)證集上的表現(xiàn)不再提升時(shí),可以停止訓(xùn)練,以避免過(guò)擬合。
Alpha 主要影響所生成模型的大小,選 0.25 模型大小約 219k,選 0.5 模型大小約 831k,選 0.75 模型大小約 1.85M,選 1.0 模型大小約 3.24M。當(dāng)運(yùn)行 maixpy 的最大固件時(shí),k210 最大只能加載約 2MB 左右的模型,所以選 0.75 就行了。
Batch Size 一般選 8 就行了。這個(gè)參數(shù)是指每次迭代訓(xùn)練時(shí),所選取的樣本數(shù)。Batch Size 的大小會(huì)影響模型訓(xùn)練的速度和穩(wěn)定性。較大的 Batch Size 可以加快模型訓(xùn)練的速度,因?yàn)槊看蔚幚淼臉颖緮?shù)量更多。但是,如果 Batch Size 過(guò)大,可能會(huì)導(dǎo)致內(nèi)存不足或顯存不足的問(wèn)題。此外,較大的 Batch Size 還可能導(dǎo)致模型過(guò)度擬合訓(xùn)練數(shù)據(jù)。較小的 Batch Size 可以提高模型訓(xùn)練的穩(wěn)定性,因?yàn)槊看蔚幚淼臉颖緮?shù)量較少,可以更好地避免過(guò)擬合。但是,較小的 Batch Size 也會(huì)導(dǎo)致訓(xùn)練時(shí)間變長(zhǎng),因?yàn)樾枰啻蔚拍芴幚硗晁袠颖尽?/p>
數(shù)據(jù)增強(qiáng)建議開(kāi)啟,他主要是做了一些隨機(jī)裁剪,隨機(jī)旋轉(zhuǎn),縮放,翻轉(zhuǎn)等。
訓(xùn)練結(jié)束后他會(huì)自動(dòng)把模型轉(zhuǎn)換為K210能使用的模型,主要文件都在result_root_dirdetector_result目錄下面,它還會(huì)給一張測(cè)試報(bào)告,確保模型損失已經(jīng)到了0.1以下。在測(cè)試報(bào)告中,epoch代表訓(xùn)練次數(shù),model loss是模型損失,train代表訓(xùn)練集,是用來(lái)訓(xùn)練模型的數(shù)據(jù)集。valid代表驗(yàn)證集,是用來(lái)評(píng)估模型性能和調(diào)整超參數(shù)的數(shù)據(jù)集。這兩條線越來(lái)越往下就是越來(lái)越好了。
文件下的boot.py是他給的測(cè)試程序,labels.txt是標(biāo)簽順序,mx.kmodel是K210實(shí)際要用的模型文件(這個(gè)文件在使用的時(shí)候需要保存到K210要使用的TF卡里面)。簡(jiǎn)單來(lái)說(shuō),把boot.py,lables.txt,mx.kmodel一起放到K210的sd卡里,重新上電就可以運(yùn)行了。
審核編輯 黃宇
-
開(kāi)發(fā)板
+關(guān)注
關(guān)注
25文章
5707瀏覽量
105198 -
數(shù)字識(shí)別
+關(guān)注
關(guān)注
2文章
21瀏覽量
10255
發(fā)布評(píng)論請(qǐng)先 登錄
立創(chuàng)·梁山派開(kāi)發(fā)板-21年電賽F題-送藥小車-K210更換固件-運(yùn)行基礎(chǔ)顏色識(shí)別例程
立創(chuàng)·梁山派開(kāi)發(fā)板-21年電賽F題-送藥小車-K210功能實(shí)現(xiàn)代碼講解
開(kāi)發(fā)板-21年電賽F題-送藥小車-小車尋紅線環(huán)的調(diào)試與實(shí)現(xiàn)
立創(chuàng)·梁山派開(kāi)發(fā)板-21年電賽F題-送藥小車實(shí)現(xiàn)思路
如何去實(shí)現(xiàn)基于K210的MNIST手寫數(shù)字識(shí)別
K210開(kāi)發(fā)板部署到開(kāi)發(fā)板上后,會(huì)提示“Out of Memory”無(wú)法完成檢測(cè)任務(wù)如何解決?
Kendryte K210開(kāi)發(fā)板使用說(shuō)明書(shū)
基于K210的MNIST手寫數(shù)字識(shí)別

使用K210和Arduino IDE/Micropython進(jìn)行圖像識(shí)別
梁山派開(kāi)發(fā)板-21年電賽F題-送藥小車-賽題分析
立創(chuàng)梁山派開(kāi)發(fā)板-21年電賽F題-送藥小車-小車角度環(huán)的調(diào)試與實(shí)現(xiàn)
立創(chuàng)·梁山派開(kāi)發(fā)板-21年電賽F題-送藥小車-與K210串口通信協(xié)議框架搭建
立創(chuàng)·梁山派開(kāi)發(fā)板-21年電賽F題-送藥小車數(shù)據(jù)的發(fā)布與訂閱





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論