 南京大學在微納仿生機械手設計及操控方面取得研究成果
南京大學在微納仿生機械手設計及操控方面取得研究成果
近年來,微納仿生機器人在疾病精準診斷、藥物研發和遞送以及MEMS/NEMS等前沿應用領域受到越來越多的關注。其中,開發具有高度靈活性和精準操作性的微納仿生機器手(Bionic gripper robotics)結構被認為是實現精確遞送、微觀組裝和功能調控等核心功能不可或缺的關鍵技術能力。然而,目前基于微加工或組裝工藝制備的機械手通常尺寸較大(毫米~厘米量級),并且傳統的靜電、電熱或應力驅動方式依賴較高驅動電壓且制動時間較長,不利于實現更高精度、多維度和更靈活的操控需求。
據麥姆斯咨詢報道,針對上述技術挑戰,南京大學余林蔚教授團隊提出了一種基于超細晶硅納米線(nanowires, NWs)定位生長和形貌編程能力實現的極簡仿生機械手可靠制備和仿生微納機械手操控應用策略。首先,基于課題組自主創新的(In-plane solid-liquid-solid, IPSLS)納米線生長模式,引導生長具有反嵌套Ω環形狀的超長、精細(直徑約100 nm)晶硅納米線;其次,將之組裝成為懸空導電溝道,在磁場背景下通過可精確調控的驅動電流,產生由納米線形貌定向的洛倫茲力,激勵微納機械手實現一些列高靈活、大振幅和多維度的三維夾取、翻轉、扭動和釋放等類手指(finger-like)仿生操作能力。
由于采用超細納米線作為機械手支架,并融合了IPSLS納米線獨特的柔性形貌設計優勢,此微納仿生機械手可以在較低的交流驅動電流下實現多模態高頻振蕩(甚至諧振),對于克服在微觀世界中普遍存在的粘性范德華力,實現可靠且精準地載荷釋放,提供了十分有利的調控新維度。最后,基于該機械手的“雙手協同”還成功地展示了對micro-LED單元的準確拾取、在線測試和定位安裝。此“單納米線塑形”(single nanowire morphing)極簡微納制備和洛倫茲力驅動策略將為快速設計、定形和驗證各類新穎仿生機器手提供一個極其方便、靈活和強大的制備應用平臺,并有望在微生物/細胞操縱、基因工程、精密組裝和高靈敏探測等前沿領域得到廣泛應用。
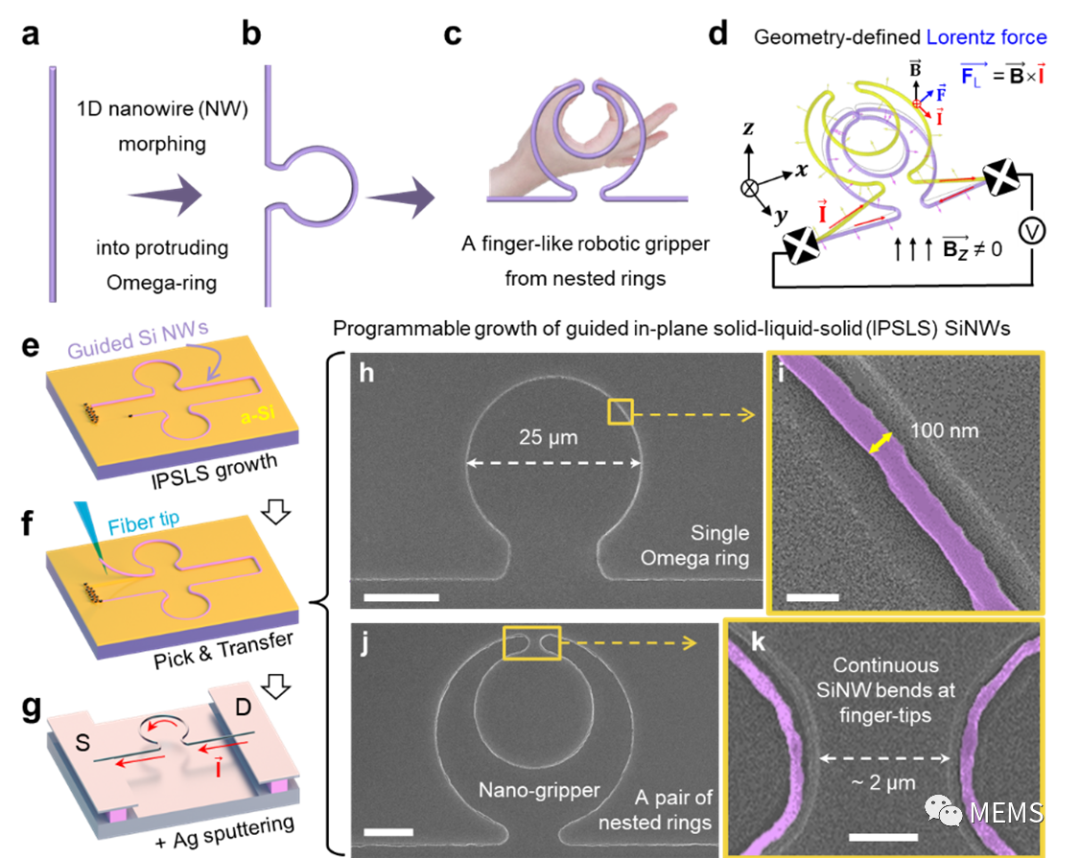
圖1 單納米線塑形設計思路及微納仿生機械手“定位、定形”引導生長、制備和組裝工藝流程。
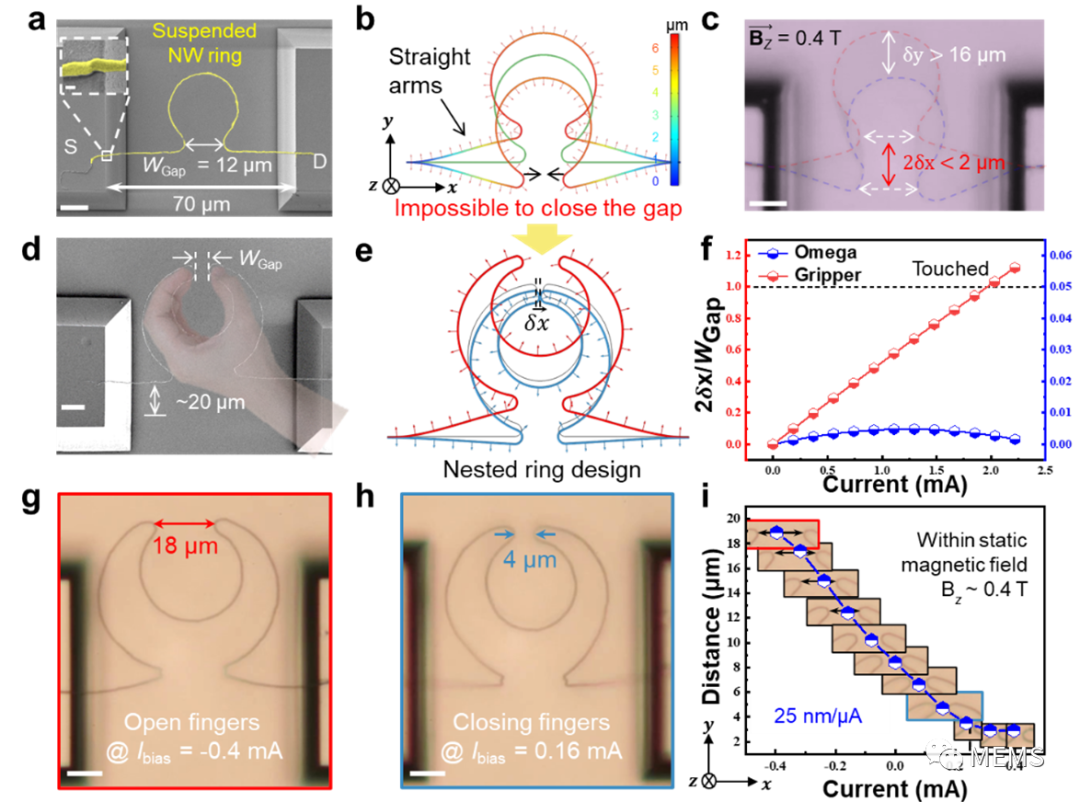
圖2 洛倫茲力驅動下微納仿生機械手“抓合-釋放”操控。
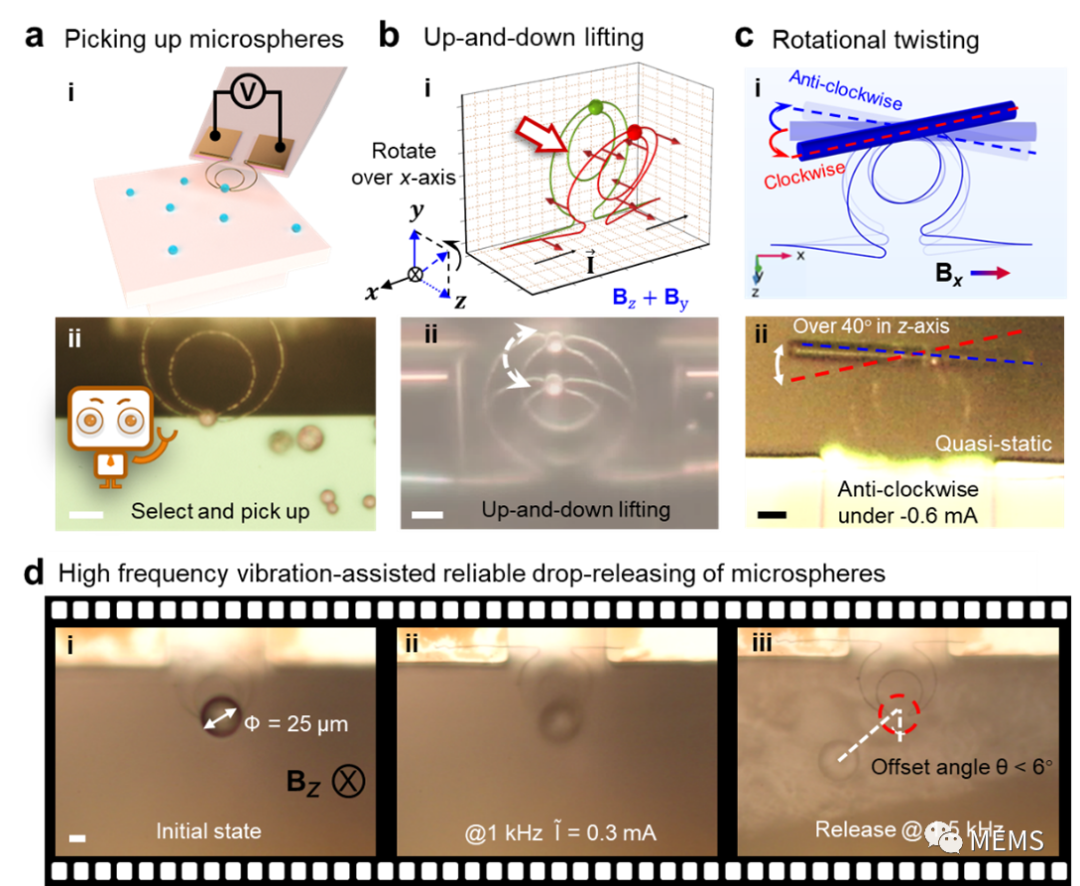
圖3 微納仿生機械手精準拾取、多維操作和振動輔助負載釋放。
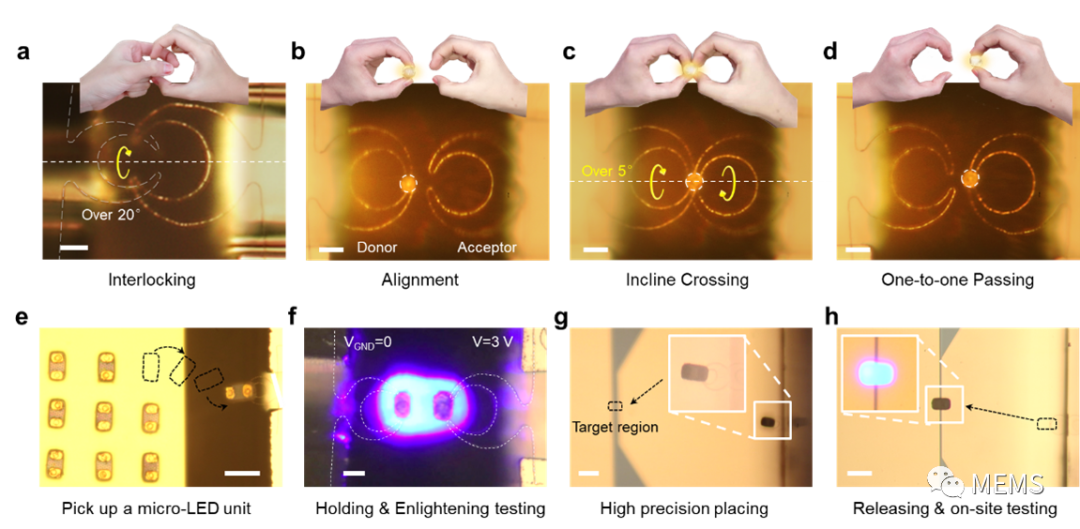
圖4 微納仿生機械手“雙手協同”操作實現微球傳遞以及微型LED點亮。
上述工作以“Ultracompact single-nanowire-morphed grippers driven by vectorial Lorentz forces for dexterous robotic manipulations”為題發表于《Nature Communications》期刊。其中,南京大學電子科學與工程學院博士生嚴江同學為論文第一作者,余林蔚教授和劉宗光副研究員為論文通訊作者。此工作的開展得到了南京大學陳坤基教授、徐駿教授、施毅教授和王軍轉教授的支持和指導,以及國家自然科學基金重大研究計劃重點項目、面上和青年項目的資助。
審核編輯:劉清
-
mems
+關注
關注
129文章
3924瀏覽量
190581 -
單晶硅
+關注
關注
7文章
191瀏覽量
28255 -
驅動電流
+關注
關注
0文章
83瀏覽量
16046 -
仿生機器人
+關注
關注
1文章
70瀏覽量
15234 -
Micro LED
+關注
關注
5文章
609瀏覽量
19260
原文標題:南京大學在微納仿生機械手設計及操控方面取得研究成果
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
中國移動與南京大學合作研發高保真2D數字人說話系統
南京大學:研發水凝膠傳感器動態保水新策略

SynSense時識科技與海南大學聯合研究成果發布

機械手 OEM 的應用
創新研究不停步,南京大學采購了南京大展的DZ-STA200同步熱分析儀

【品質見證,智慧之選】南京大學選購了南京大展儀器的差示掃描量熱儀

機器視覺控制機械手的具體過程
PLC在機械手控制系統中的具體應用
深圳大學采購南京大展的導熱系數測試儀,開啟材料科學新研究

未來的眼睛: 南京大學團隊研發出眼動追蹤隱形眼鏡
哈爾濱工業大學在微納光學領域取得重要進展

ZR機械手:技術升級,推動產業變革
誠邁科技在南京大學成功舉辦OpenHarmony Meetup 南京站






 工商網監
工商網監
評論