 基于FPGA的速率自適應圖像抽取算法
基于FPGA的速率自適應圖像抽取算法

點擊上方藍字關注我們
荷圖像可視化是深空探測任務中的重要需求,但受信道帶寬的限制,無法實時傳輸所有載荷數據,因此星載復接存儲器中圖像的抽取下傳是實現任務可視化的關鍵。
本文設計了一種載荷圖像抽取方法,適用于深空探測航天器載荷自主管理和可視化應用。通過圖像幀識別、指針管理和數據篩選實現圖像抽幀回放算法,具有圖像完整、實時,速率自適應的特點。該方法在某探測器工程項目中采用FPGA進行了實現,經測試、試驗驗證,滿足工程可視化要求。
0引言
隨著深空探測任務需求的發展,星上數據流呈現復雜化、多樣化,對在軌數據處理的需求迅速增長,地面可視化是深空探測工程任務的重要需求之一,在軌圖像的存儲和實時抽取下傳是解決可視化需求的關鍵。實際工程中,圖像數據量與下行速率之間存在矛盾,工程應用上需要獲取高分辨率的載荷圖像導致了數據速率的增加,而深空探測受數傳信道距離和速率的限制,無法實時下傳全部數據。因此需要在星載復接存儲器中對圖像進行處理,存儲圖像數據的同時對圖像進行整幀抽取,下傳最新的圖像,實現任務可視化。星載復接存儲器的功能是將多路不同格式的載荷數據按照高級在軌系統協議格式形成一路數據流,經過切分、組幀形成多個虛擬信道數據單元(VCDU),存入大容量存儲芯片(FLASH),同時將大容量存儲芯片中的數據按照選定地址進行回放,并根據需求對回放數據進行篩選。
針對上述需求,在星載復接存儲器的存儲回放過程中通過圖像幀識別、指針管理、數據篩選實現抽取速率自適應的載荷圖像抽取方法,并通過FPGA進行實現和驗證,可為后續深空探測載荷數據管理任務提供技術參考。
1抽幀回放算法
星載復接存儲器的功能為復接多路載荷圖像數據,將復接后的數據流存入大容量存儲器,根據回放指令將固存中數據讀出,進行信道編碼后輸出至數傳。
抽幀回放的過程應結合復接存儲器的工作過程,由于一幅圖像數據量較大,復接器入口無法緩存整幅圖像,因此綜合考慮軟硬件開銷,設計在記錄時進行數據標記,抽取在存儲之后的回放過程中完成。
抽取方法如圖1所示,圖像通過LVDS接口以串行形式輸入,在接口預處理模塊,將一幅圖像切分并填充為多個虛擬信道數據單元(VCDU),用于存儲和下傳。
同時利用跟隨的門控信號判定圖像數據的頭尾,產生圖像幀頭、幀尾標識信號,以標識一幅完整的圖像。信息附加模塊將頭尾標識信號組織成附加信息,填入數據內。
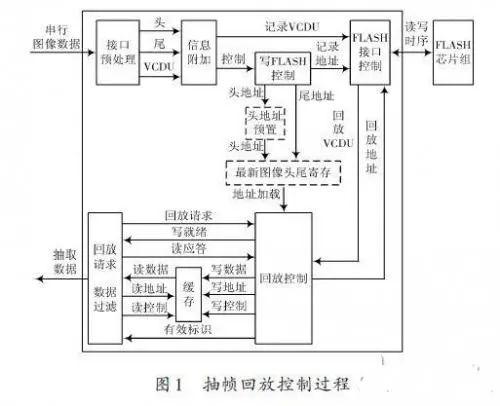
為了保證回放的圖像總是最新的圖像數據,需要知道最新圖像的幀頭VCDU地址及幀尾VCDU的存儲地址。因此在記錄過程中,使用一個最新圖像數據幀地址寄存器來記錄存儲器中最新圖像的幀頭幀尾VCDU地址,每收完一幅完整的圖像數據立即更新最新圖像數據幀地址寄存器中的地址信息,保證最新圖像數據幀地址寄存器中的地址為最新圖像數據的幀頭幀尾VCDU地址。
回放時,收到數據請求信號,回放控制模塊從最新圖像數據幀地址寄存器中加載最新圖像地址,從此地址處依次回放,直到遇到了有尾幀標記字節的數據幀,完成一幅圖像的抽取回放,之后繼續加載最新圖像數據幀地址寄存器,進行下一幅圖像回放。
由于采用數據復接設計,多路圖像會同時進入存儲器,以多種VCDU的形式存在,FLASH的頁操作導致每次回放出的數據為兩個VCDU,因此在備用符號域中設計附加信息,通過對附加信息的判讀濾除多余數據,保證回放數據中充滿有效抽取圖像。
回放的速率取決于下行信道的速率,工程中由上級的回放請求信號控制。在每次請求到來時,均加載預先存入的最新圖像地址,既保證了圖像實時性,又達到了抽取速率自適應的要求。
抽幀回放算法主要考慮三個方面:抽取圖像為完整的載荷圖像數據;當前抽取出的圖像為最新數據;抽取算法對抽取速率自適應。
1.1完整性設計
輸入圖像數據由接口模塊生成VCDU,不同載荷數據通過VCID被區分為不同類的VCDU,由于FLASH采用頁操作模式,一頁的大小為2 KB,設計中一頁包含兩個VCDU.
FLASH的讀寫都基于頁進行操作,讀出一頁的兩個VCDU中,有多種可能性,數據處理過程如圖2所示,圖2中給出三種可能,一是前一個是需要抽取的頭數據,后一個是需要抽取的中間數據;二是前一個是需要抽取的圖像數據,后一個是不需要抽取的其他VCDU數據;三是前一個是需要抽取的尾數據,后一個是下一幅圖像的頭,但不需要抽取。
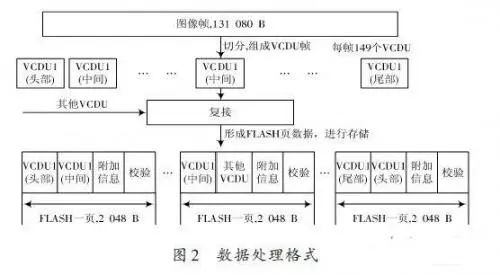
可見,在抽取回放中必須濾除一定數據,保證抽取圖像的完整性和正確性,因此在存儲時增加附加信息,以解決圖像完整性問題。
附加信息設計為6 b,格式定義見表1.
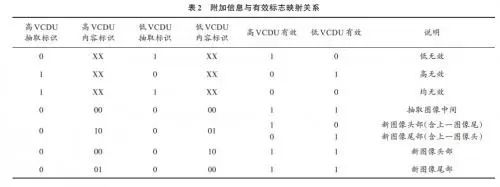
附加信息與數據一起被存到存儲芯片中。在回放時,讀取附加信息,解析出高VCDU有效/無效信號和低VCDU有效/無效信號。由回放請求模塊進行數據濾除,保證僅回放有效數據,并且為完整圖像。
附加信息與有效標志映射關系見表2.對輸入數據的各種情況,按照表2中映射關系解析出有效/無效信號。
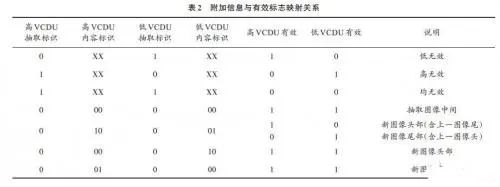
數據過濾模塊設置緩存,根據高低VCDU有效標示控制緩存地址,為1進行讀取,為0跳過無效的VCDU數據,實現數據的濾除。
1.2實時性設計
方法中必須獲取到幀頭VCDU信息和幀尾VCDU信息才會更新圖像數據幀地址寄存器,即在收到一整幅圖像之后才能進行回放。
抽取的延時計算一幅圖像第一比特輸出和輸入時間之差,最壞情況時第N幅圖像已經寫入,第N + 1幅圖像尾部沒有寫完,即在第N幅圖像頭寫入后兩幅圖像時間才開始回放。抽取過程中延遲時間=兩幅圖像時間+數據回放時間。工程中,圖像生成速率為10幅/s,一幅圖像的生成時間按100 ms計算。
回放數據的時間為數據從FLASH芯片中讀出時間和數據緩存時間,每頁2 KB,讀取時間約320μs;其余處理路徑上的寄存時間《10μs.因此,抽取過程中延遲時間約為200.33 ms,完全可以滿足圖像的回放觀看需要。
1.3速率自適應設計
圖像抽取的比例(即抽取圖像的間隔)與輸入速率和回放速率相關,在工程應用中,輸入圖像速率為13.33 Mb/s,回放速率為50 Kb/s,其中圖像有效數據率為41.808 Kb/s,一幅圖像大小為131 080 B,每幅圖像形成149個VCDU幀,下行共149×1 024 B=152 576 B.
以50 Kb/s速率進行回放,回放一幅圖像需要152 576×8/41 808=29.19 s,此過程中記錄圖像29.19×10=291.9,約292幀,即間隔約292幀抽取一幅圖像。
實現速率自適應的關鍵是抽取方法的各個環節和輸入速率、回放速率均沒有耦合。
輸入數據通過幀頭尾識別,劃分為標識出頭尾的VCDU,輸入數據速率改變,僅影響VCDU的數據間隔。
VCDU的數據間隔實際影響寫控制模塊對FLASH芯片操作的頻繁程度。因此在輸入速率符合入口速率的要求時,數據可以被正常存儲并產生附加信息,輸入速率對方法沒有影響。
回放數據從FLASH讀出后,解析附加信息,進行緩存、濾除無效數據后輸出回放。回放速率的改變,將導致回放控制模塊加載頭尾寄存器的間隔改變。回放速率減慢,加載間隔增長,頭尾地址寄存器將被寫控制模塊刷新多次,即抽取圖像的間隔自動增大。回放速率加快,加載間隔減小,由于在算法設計中考慮只有新的頭尾地址被存入時,回放模塊才能正確加載新地址,否則回放模塊會停止在當前地址繼續等待新圖像。因此抽取圖像的間隔會自動減小,當沒有新圖像時,抽取模塊會等待新數據進入。
速率的自適應有利于算法的穩定性和通用性,在輸入、回放速率改變時不需要改變抽取程序即可實現抽取回放功能。
2工程實現與驗證
在工程中采用Xilinx公司300萬門FPGA,XQR2V3000[10]進行實現,占用資源(Slices)27%,經仿真和測試驗證滿足需求。
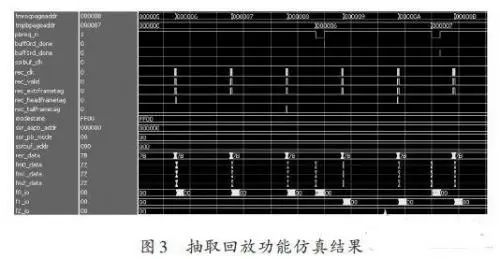
2.1仿真情況
FPGA仿真情況如圖3所示,在抽取回放過程中,回放指針關系正確,間隔相等,符合分析情況。
2.2工程驗證情況
在下行速率50 Kb/s時,按前述計算,間隔292幀抽取一幅圖像。實際測試中,抽取圖像均為整幅圖像幀,且兩幅圖像之間連續,抽取的圖像號為0,291,581,872,1 167,1 457,1 749,2 040,2 334,2 627,2 917,3 209,3 500,3 793,4 083,4 377,4 668,4 961,5 251,5 543,5 837,6 128,6 421,6 711,7 003,圖像號、圖像間距的測試結果與理論值對比如圖4(a),(b)所示,實際測試圖像間隔與計算值符合,誤差小于3幅圖像。
在下行速率250 Kb/s時,有效數據率為241.808 Kb/s,按上文計算方式計算,間隔約50幀抽取一幅圖像。實際測試中,抽取圖像均為整幅圖像幀,且兩幅圖像之間連續,抽取的圖像號為0,50,100,151,201,251,302,353,403,453,504,555,605,655,706,757,807,857,908,959,1 009,1 059.圖像號、圖像間距的測試結果與理論值對比如圖4(c)、(d)所示,實際測試圖像間隔與計算值符合,誤差小于1幅圖像。
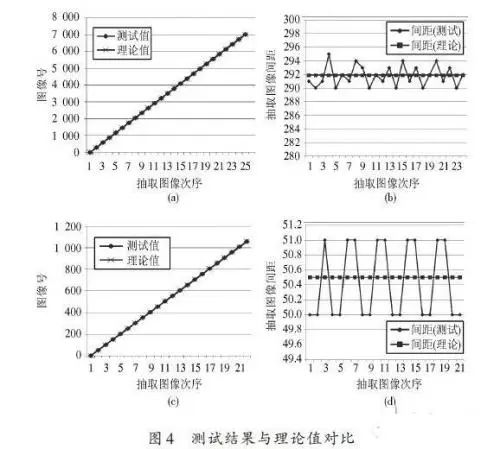
兩種速率下,實際測試圖像間隔與計算值符合,驗證了方法的功能性能符合需求,且具有速率自適應特點。
3結語
本文設計實現了一種速率自適應的載荷圖像抽取方法,適用于深空探測器載荷自主管理和地面可視化應用,實現了完整載荷圖像實時抽取。采用FPGA實現算法,經過測試,抽取圖像完整,等間距,可適用于不同下傳速率,滿足可視化要求。可以作為后續深空探測載荷自主管理的技術參考。

有你想看的精彩 至芯科技-FPGA就業培訓來襲!你的選擇開啟你的高薪之路!7月12號北京中心開課、歡迎咨詢! 利用FPGA進行基本運算及特殊函數定點運算 如何在FPGA中實現狀態機
掃碼加微信邀請您加入FPGA學習交流群


歡迎加入至芯科技FPGA微信學習交流群,這里有一群優秀的FPGA工程師、學生、老師、這里FPGA技術交流學習氛圍濃厚、相互分享、相互幫助、叫上小伙伴一起加入吧!
點個在看你最好看
原文標題:基于FPGA的速率自適應圖像抽取算法
文章出處:【微信公眾號:FPGA設計論壇】歡迎添加關注!文章轉載請注明出處。
-
FPGA
+關注
關注
1636文章
21841瀏覽量
608506
原文標題:基于FPGA的速率自適應圖像抽取算法
文章出處:【微信號:gh_9d70b445f494,微信公眾號:FPGA設計論壇】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
GLAD應用:大氣像差與自適應光學
AMD Versal自適應SoC器件Advanced Flow概覽(下)
基于自適應優化的高速交叉矩陣設計
UHF RFID自適應射頻干擾對消技術
步進電機如何自適應控制?步進電機如何細分驅動控制?
FPGA在圖像處理領域的優勢有哪些?

ALINX受邀參加AMD自適應計算峰會
FPGA在人工智能中的應用有哪些?
如何在自己的固件中增加wifi自適應性相關功能,以通過wifi自適應認證測試?
基于FPGA的實時邊緣檢測系統設計,Sobel圖像邊緣檢測,FPGA圖像處理
基于FPGA的常見的圖像算法模塊總結

重大突破│捷杰傳感APEF自適應算法將設備健康監測誤報率和漏報率降低92.8%!






 工商網監
工商網監
評論