") 機(jī)載雷達(dá)和電子對抗的相關(guān)概念和技術(shù)
機(jī)載雷達(dá)和電子對抗的相關(guān)概念和技術(shù)
今天介紹的這篇論文主要討論了機(jī)載雷達(dá)和電子對抗的相關(guān)概念和技術(shù)。論文原文有94頁,下面是學(xué)習(xí)的一些基礎(chǔ)知識(shí),更多內(nèi)容可以發(fā)送“230805”查看原文學(xué)習(xí)。
首先,文章介紹了脈沖多普勒雷達(dá)的基本原理和功能。脈沖多普勒雷達(dá)具有測量目標(biāo)距離和速度的能力,這是通過發(fā)射脈沖信號(hào)并接收從目標(biāo)反射回來的信號(hào)來實(shí)現(xiàn)的。由于目標(biāo)的移動(dòng),接收到的信號(hào)的頻率會(huì)發(fā)生變化,這就是常說的多普勒效應(yīng)。通過分析多普勒頻率的改變,雷達(dá)系統(tǒng)可以確定目標(biāo)的速度和位置。
文章還探討了地面雜波、脈沖壓縮以及電子對抗等概念。地面雜波是一個(gè)雷達(dá)系統(tǒng)在檢測飛行物體時(shí)需要面對的問題,主要是由地面特征(如建筑物、山脈或海波)產(chǎn)生的反射。而脈沖壓縮則是一種處理方法,可以提高雷達(dá)的分辨率和靈敏度。
在電子對抗方面,文章詳細(xì)介紹了數(shù)字射頻存儲(chǔ)器(DRFM)技術(shù)。這是一種用于創(chuàng)建虛假目標(biāo)和干擾信號(hào)的方法,其目的是混淆雷達(dá)系統(tǒng),使雷達(dá)無法準(zhǔn)確判斷真實(shí)目標(biāo)的位置和速度。
最后,文章還談到了雷達(dá)干擾的不同形式和對策。雷達(dá)干擾可以分為有源干擾和無源干擾。有源干擾包括發(fā)射虛假的雷達(dá)信號(hào),誤導(dǎo)敵方雷達(dá);無源干擾則包括使用反射材料或其他方式,使得雷達(dá)無法正確檢測到目標(biāo)。而對于這些干擾,雷達(dá)系統(tǒng)可能需要采用各種策略進(jìn)行防御,比如使用更高級(jí)的信號(hào)處理技術(shù)、增加雷達(dá)頻率,或者采用更復(fù)雜的編碼方式。
總的來說,這篇文章為提供了關(guān)于機(jī)載雷達(dá)和電子對抗的基本知識(shí)和技術(shù)的全面了解,無論是已經(jīng)在這個(gè)領(lǐng)域工作的專業(yè)人士,還是剛剛?cè)腴T的新手,都有著較大的參考價(jià)值。
選擇脈沖重復(fù)間隔
選擇脈沖重復(fù)間隔(Pulse Repetition Interval,PRI)以獲取更準(zhǔn)確的雷達(dá)測量結(jié)果的確是一個(gè)權(quán)衡的過程。
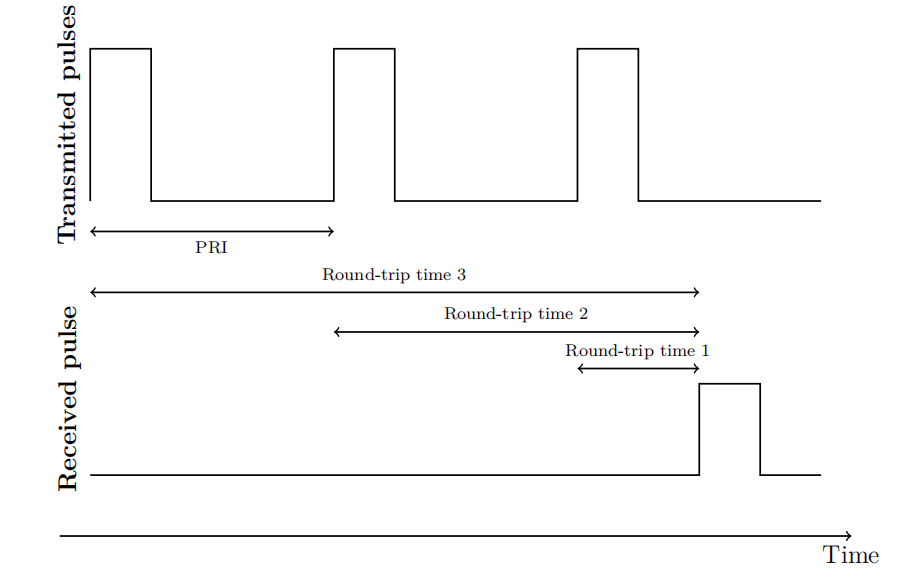
選擇較低的PRI,頻譜中的旁瓣間隔會(huì)比較大,這意味著可以更精確地測量目標(biāo)的速度,因?yàn)椴煌俣鹊哪繕?biāo)在頻譜中的峰值位置會(huì)有明顯的差別。然而,這也導(dǎo)致最大無模糊測量距離變小,也就是說,能夠準(zhǔn)確測量的距離會(huì)變得更短。
選擇較高的PRI,可以在更遠(yuǎn)的距離上測量目標(biāo),這就提高了最大無模糊測量距離。但這也意味著頻譜中的旁瓣會(huì)接近真實(shí)頻率峰值,可能會(huì)導(dǎo)致目標(biāo)的速度測量出現(xiàn)模糊,因?yàn)椴煌俣鹊哪繕?biāo)在頻譜中的峰值位置可能會(huì)非常接近。
因此,要得到理想的測量結(jié)果,需要在測量距離和速度測量的準(zhǔn)確性之間進(jìn)行權(quán)衡,選擇合適的PRI。
在實(shí)際的空中作戰(zhàn)中,雷達(dá)系統(tǒng)可能需要在多個(gè)PRI值之間切換,以解決測量距離和速度的模糊問題。一般來說,空中作戰(zhàn)的典型PRI在百微秒數(shù)量級(jí),每個(gè)PRI的脈沖數(shù)通常為幾百個(gè)。這樣做可以根據(jù)當(dāng)前的作戰(zhàn)環(huán)境和任務(wù)需求,靈活地調(diào)整雷達(dá)的性能。
理解距離-多普勒圖
距離-多普勒圖是一種在雷達(dá)信號(hào)處理中常用的工具,它可以根據(jù)雷達(dá)接收到的回波信號(hào)來展示目標(biāo)的距離和速度。
當(dāng)雷達(dá)發(fā)射一系列脈沖并接收回波信號(hào),這個(gè)過程會(huì)生成一段連續(xù)的時(shí)間序列數(shù)據(jù)。這些數(shù)據(jù)隨后被分割成離散的時(shí)間步長,也就是所謂的“距離門”。每一個(gè)距離門對應(yīng)一段特定的距離區(qū)間,這個(gè)距離區(qū)間是由雷達(dá)脈沖的傳播時(shí)間決定的。
雷達(dá)系統(tǒng)會(huì)對每一個(gè)距離門中的回波信號(hào)進(jìn)行頻譜分析,以此得到該距離區(qū)間內(nèi)存在目標(biāo)的多普勒頻率(也就是目標(biāo)的速度)。這樣就可以根據(jù)每個(gè)距離門的多普勒頻率分布來生成一個(gè)二維的距離-多普勒圖。需要注意的是,每個(gè)接收間隔中的距離門數(shù)量主要取決于雷達(dá)的脈沖重復(fù)間隔和脈沖長度。
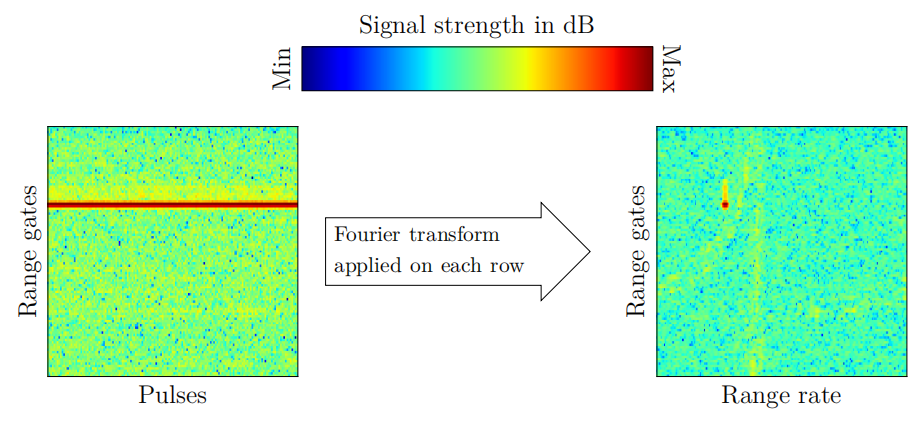
在雷達(dá)信號(hào)處理中,接收到的回波信號(hào)通常被轉(zhuǎn)換為復(fù)數(shù)形式的I/Q數(shù)據(jù),分別代表了原始信號(hào)的實(shí)部和虛部,或者可以理解為信號(hào)的兩個(gè)正交分量。當(dāng)雷達(dá)在各個(gè)距離門上接收回波信號(hào)時(shí),每個(gè)距離門在每個(gè)接收間隔中的I/Q值都會(huì)被記錄下來并存儲(chǔ)成一個(gè)M×N的復(fù)數(shù)數(shù)組,其中M表示距離門的數(shù)量,N表示接收間隔(或脈沖)的數(shù)量。在這個(gè)數(shù)組中,每一行對應(yīng)一個(gè)特定的距離門,每一列對應(yīng)一個(gè)特定的接收間隔(脈沖)。
為了從時(shí)域轉(zhuǎn)換到速度域(也就是得到目標(biāo)的多普勒頻率),對數(shù)組的每一行(即每個(gè)距離門的數(shù)據(jù))進(jìn)行傅里葉變換,并乘以一個(gè)窗函數(shù)進(jìn)行加權(quán)。由于傅里葉變換可以將時(shí)域信號(hào)轉(zhuǎn)換為頻域信號(hào),這樣就可以得到每個(gè)距離門上目標(biāo)的多普勒頻率,進(jìn)而生成距離-多普勒圖。
可以使用卷積神經(jīng)網(wǎng)絡(luò)(Convolutional Neural Networks,CNN)來檢測機(jī)載雷達(dá)中的干擾和干擾模式。卷積神經(jīng)網(wǎng)絡(luò)是一種深度學(xué)習(xí)模型,通常用于處理圖像數(shù)據(jù)。在雷達(dá)信號(hào)處理中,CNN可以從距離-多普勒圖中提取特征,并學(xué)習(xí)識(shí)別不同類型的干擾和干擾模式。 首先需要收集或生成大量的有標(biāo)簽的訓(xùn)練數(shù)據(jù),包括正常的雷達(dá)回波信號(hào),以及各種類型的干擾和干擾信號(hào)。然后,使用這些數(shù)據(jù)來訓(xùn)練CNN模型,使其能夠區(qū)分正常信號(hào)和干擾信號(hào)。 在操作期間,雷達(dá)系統(tǒng)可以實(shí)時(shí)將接收到的回波信號(hào)轉(zhuǎn)換為距離-多普勒圖,并輸入到預(yù)先訓(xùn)練好的CNN模型中。如果模型判斷當(dāng)前的信號(hào)包含干擾,雷達(dá)系統(tǒng)可以立即采取相應(yīng)的對策,例如改變工作頻率,或者啟動(dòng)電子對抗系統(tǒng)等。 這種方法具有很高的靈活性和適應(yīng)性,因?yàn)镃NN模型可以通過不斷的學(xué)習(xí)和訓(xùn)練來適應(yīng)新的干擾和干擾模式。而且,由于CNN模型可以并行處理大量數(shù)據(jù),這種方法的計(jì)算效率也非常高。
審核編輯:湯梓紅
-
存儲(chǔ)器
+關(guān)注
關(guān)注
38文章
7484瀏覽量
163763 -
電子對抗
+關(guān)注
關(guān)注
0文章
9瀏覽量
9955 -
脈沖信號(hào)
+關(guān)注
關(guān)注
6文章
398瀏覽量
36956 -
機(jī)載雷達(dá)
+關(guān)注
關(guān)注
0文章
18瀏覽量
7594
原文標(biāo)題:機(jī)載雷達(dá)和電子對抗的相關(guān)概念和技術(shù)
文章出處:【微信號(hào):雷達(dá)通信電子戰(zhàn),微信公眾號(hào):雷達(dá)通信電子戰(zhàn)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評(píng)論請先 登錄
相關(guān)推薦
電子對抗系統(tǒng)中的概率準(zhǔn)則存在哪些缺陷?
求有關(guān)電子對抗有關(guān)的matlab程序
機(jī)載雷達(dá)面臨哪些技術(shù)難題?機(jī)載雷達(dá)的信號(hào)是如何分布的?
簡述電子對抗綜合模擬訓(xùn)練平臺(tái)
分布式仿真在電子對抗中的應(yīng)用
某型飛機(jī)綜合電子對抗系統(tǒng)的模擬實(shí)現(xiàn)
機(jī)載電子對抗設(shè)備自動(dòng)測試系統(tǒng)的開發(fā)
2010-2015年通信電子對抗設(shè)備市場研究及投資發(fā)展報(bào)告
現(xiàn)代雷達(dá)電子對抗技術(shù)
機(jī)載雷達(dá)對抗系統(tǒng)仿真






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論