 電氣自動化控制專業術語大全 / 基本的模塊電路及原理
電氣自動化控制專業術語大全 / 基本的模塊電路及原理
控制系統的第一代產生于1930年到1940年,主要代表是以基地式儀表為代表的機械控制技術。第二代產生于1950年,主要是電氣控制技術為主的繼電器控制技術和調節器為代表的模擬控制技術。目前所稱的控制系統是第三代控制系統,誕生于二十世紀七十年代,主要技術代表是用于流程工業的集散控制系統(DCS)和用于離散工業的可編程控制器(PLC)。
為了正確理解控制系統的意義,有一些關于控制的術語是必須要了解的,在這里介紹一下。
I/O點
在討論控制系統的時候,I/O點是最經常聽到的一個術語。它是指輸入/輸出點,I代表INPUT,指輸入,O代表OUTPUT,指輸出。輸入/輸出都是針對控制系統而言,輸入指從儀表進入控制系統的測量參數,輸出指從控制系統輸出到執行機構的參量,一個參量叫做一個點。一個控制系統的規模有時按照它最大能夠控制的I/O點的數量來定的。
模擬量和開關量
在控制系統中,另一個常見的術語就是模擬量和開關量。不論輸入還是輸出,一個參數要么是模擬量,要么是開關量。模擬量指控制系統量的大小是一個在一定范圍內變化的連續數值,比如溫度,從0-100度,壓力從0-10MPA,液位從1-5米,電動閥門的開度從0-100%,等等,這些量都是模擬量。而開關量指該物理量只有兩種狀態,如開關的導通和斷開的狀態,繼電器的閉合和打開,電磁閥的通和斷等等。
對控制系統來說,由于CPU是二進制的,數據的每位有“0”和“1”兩種狀態,因此,開關量只要用CPU內部的一位即可表示,比如,用“0”表示開,用“1”表示關。而模擬量則根據精度,通常需要8位到16為才能表示一個模擬量。最常見的模擬量是12位的,即精度為2-12,最高精度約為萬分之二點五。當然,在實際的控制系統中,模擬量的精度還要受模擬/數字轉換器和儀表的精度限制,通常不可能達到這么高。
控制回路
通常是針對模擬量的控制來說,一個控制器根據一個輸入量,按照一定的規則和算法來決定一個輸出量,這樣,輸入和輸出就形成一個控制回路。控制回路有開環和閉環的區別。開環控制回路,指輸出是根據一個參考量而定,輸入和輸出量沒有直接的關系。而閉環回路則將控制回路的輸出再反饋回來作為回路的輸入,與該量的設定值或應該的輸出值作比較。閉環回路控制又叫反饋控制,是控制系統中最常見的控制方式。下面介紹幾種常規的反饋控制的模式。
二位控制
這是最簡單的反饋控制,有時也叫開關控制。這種控制是當被測量達到最高值或最低值的時候,就給出一個開關的信號。雖然被測量可能是模擬量,但控制輸出是開關的,所以叫兩位控制。在工業現場,有許多溫控器和液位開關控制是采用這種方式的。
比例控制
控制器的輸出值與被控參數的測量值和設定值或某個參考點的偏差是一個比例關系。比例控制比二位控制要平滑一些,消除了二位控制時會產生的被控量上下振蕩的情形。比如,對一個反應罐的液位,如果設定的液位值是2700毫米,當液位降低時,進料管道上的閥門就要增加開度,而液位偏高時,則要將開度減小。增加和減小的比例與液位和設定值的偏差大小成比例關系。
積分控制
在積分控制中,被控變量的值的變化與控制系統輸出控制到實際生效的時間有一個預先設定的關系。執行機構的輸出是漸漸地達到設定的值的。這種控制方式的產生是由于實際的控制元件和執行機構從給出輸出信號到使被控變量達到設定值往往需要一段時間。
最常見的例子是溫度控制,比如,假定我們知道到煤氣閥門的開度到60%的時候,熱水器的水溫能夠達到適宜洗澡的45度,但是,當你把閥門一下子擰到60%的位置時,水依然是涼的,你必須等一下,水溫升到45度左右的時候,就會穩定。如果控制系統不用積分控制,而只用比例控制,那么當閥門輸出為60%時,這是輸入的溫度值可能依然只有20度,那么按照比例控制,既然偏差依然存在,則閥門的開度會繼續加大,這樣,當水溫升到45度時,閥門的開度可能會達到了90%甚至更高,這時,雖然控制系統會通知閥門保持不動,但水溫會繼續升高,可能到了50甚至60度,這時,閥門的開度會減小,但在減小到60%之前,水溫都會繼續上升,當閥門開度減到60%時,水溫依然可能70度,一直當閥門的開度變成20%時,水溫才會變成45度,這時閥門運動會停止,但水溫卻會繼續下降,直到變成涼水,如果這時是冬天,可能你的情形還要糟糕。這就是沒有積分控制的溫度控制器會發生的情況。如果你有小孩,當孩子第一次操作熱水器的閥門的時候,發生的情形就很像這種情況。
微分控制
微分控制通常與比例和積分控制同時使用,由于積分控制有一個滯后,微分控制可以讓控制對偏差的反應提前,以免控制系統的反應過于遲鈍。微分控制與比例和積分控制同時使用,可以使被控狀態更迅速地達到穩定狀態,而又不會出現上文出現的振蕩現象。
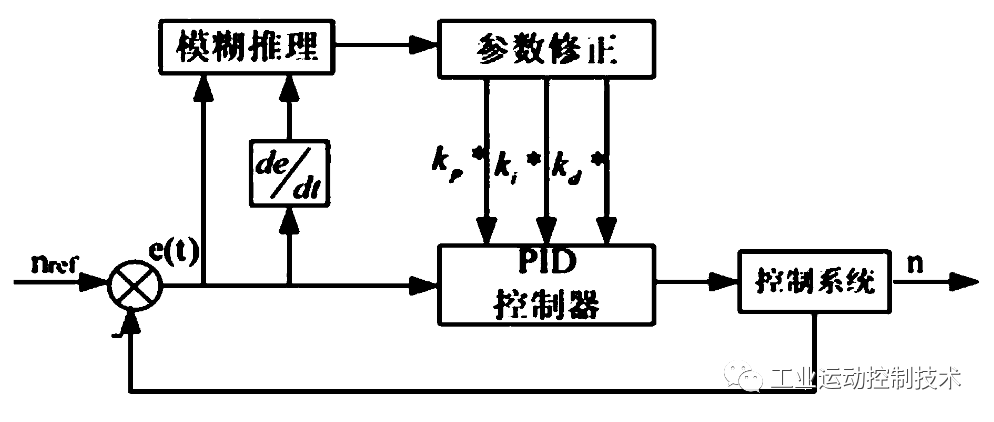
PID 控制
在實際的控制系統中,根據實際變量的情況,上述三種控制方式有時只有一種,有時是兩種,有時三種同時采用。比例控制用P表示,積分控制用I表示,微分控制用D表示,根據采用的方式,分別稱為P控制,PI控制,PID控制。其中,PID控制是控制系統最常見的控制模式。
延時控制
通常應用在開關量控制的場合,當一個開關狀態變化時(比如由開變關時),控制器的輸出動作要延時一段時間才會給出。比如,在生產線常用的接近開關,當工件就位時,接近開關給出信號,下一個滾筒由于和接近開關安裝的位置有一段距離,所以通常要延遲幾秒才開始滾動。
連鎖控制
也是常用于開關控制的場合,比如有三個開關,A、B和C,C開關必須在A和B同時打開的時候,才能夠打開;或者當A打開時,C必須打開;這種關系就是連鎖控制。在工業現場中,尤其是在涉及安全控制的場合,連鎖控制方式是很常見的。比如反應釜中的放散閥,當壓力達到一定值時,壓力開關的信號發生變化,則放散閥門必須立刻打開。
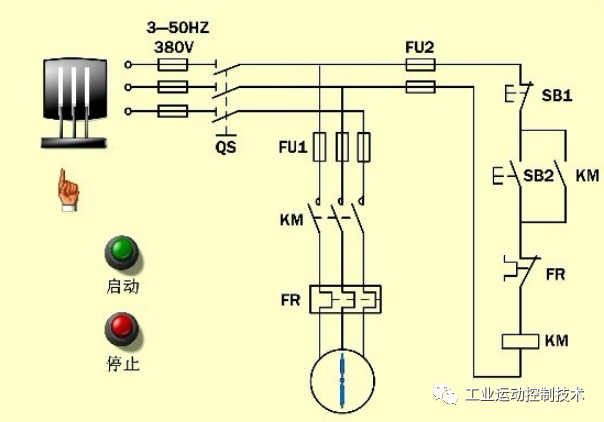
電動控制
指控制系統的輸出是通過電氣量或電子信號來進行的,所控制的對象是電動執行元件,比如繼電器、步進開關、電磁閥、伺服驅動器和變頻器等等,絕大部分的自動控制多多少少都會有電動控制元件。
液壓控制
在機器與設備的操作中,許多控制是用液壓控制機構來進行的。在連續速度控制的場合,液壓控制通常比較方便和便宜,當能量轉換效率較高的時候,液壓控制往往和電動控制中的伺服控制同時使用。這時,就形成了效率和精度較高的電液執行機構。
氣動控制
有三種情形用到氣動執行機構:
1、運動的線路上有標準的單向氣動閥門組合來完成控制邏輯功能;
2、在氣體管道中采用一些沒有移動部件的元件,這些元件是依靠流過的氣體的特性而進行開關動作的;
3、運動的邏輯控制系統,采用模塊化的內置隔膜、繞線或套筒式。這三種氣動元件都是采用壓縮空氣作為傳輸信號或執行機制的動力。在工廠中,由于壓縮空氣容易獲得,干凈、無污染,又安全,控制的功能和設計都十分簡單,因此,現在許多生產線上采用氣動工具。
-
模塊
+關注
關注
7文章
2695瀏覽量
47433 -
電氣
+關注
關注
18文章
1166瀏覽量
53114 -
控制
+關注
關注
4文章
1011瀏覽量
122657 -
自動化
+關注
關注
29文章
5563瀏覽量
79242
發布評論請先 登錄
相關推薦
可控硅在工業自動化中的作用
電子耦合在自動化控制中的作用
高壓電氣試驗的分類及專業術語介紹
機械自動化和電氣自動化區別是什么
14芯M16公頭連接器專業術語

繼電器在工業自動化領域的應用
藍牙模塊在工業自動化中的應用
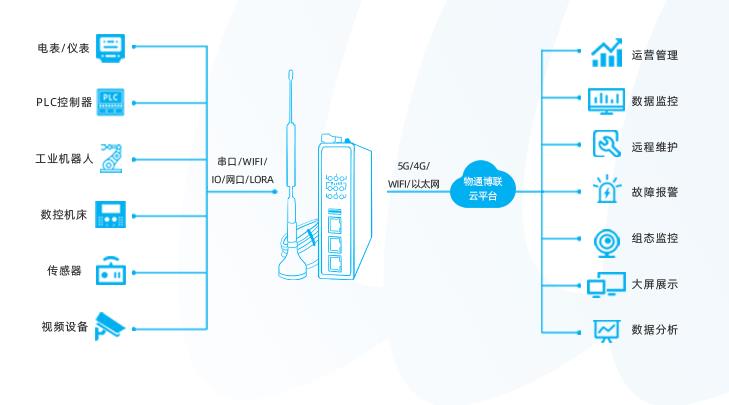
PLC電氣自動化實驗臺遠程監控運維管理系統
工業自動化中的控制方式
如何實現PLC的自動化控制邏輯
光通信行業專業術語解析大全
DC電源模塊在工業自動化中的應用案例分析






 工商網監
工商網監
評論