") 燃料電池系統(tǒng)在線自適應(yīng)快速喘振檢測(cè)及保護(hù)控制策略
燃料電池系統(tǒng)在線自適應(yīng)快速喘振檢測(cè)及保護(hù)控制策略
燃料電池系統(tǒng)在線自適應(yīng)快速喘振檢測(cè)及保護(hù)控制策略
燃料電池需通入大量空氣進(jìn)入陰極側(cè)參與氫氧還原反應(yīng),為了提升效率,會(huì)對(duì)空氣進(jìn)行加壓處理。得益于其緊湊的結(jié)構(gòu)、以及高轉(zhuǎn)速優(yōu)勢(shì),離心式壓縮機(jī)是目前燃料電池系統(tǒng)主流配置。不幸的是,目前燃料電池高效工作點(diǎn)往往與空壓機(jī)的喘振臨界線接近,導(dǎo)致工作中常常出現(xiàn)喘振現(xiàn)象,嚴(yán)重降低了發(fā)動(dòng)機(jī)運(yùn)行穩(wěn)定性、效率和壽命。
車載工況下,喘振發(fā)生的誘因眾多且不確定因素大,工況的快速變化,閉環(huán)控制的缺陷,零部件的故障等因素都可能觸發(fā)喘振。雖然可以從操作條件設(shè)計(jì)出發(fā),設(shè)計(jì)工作區(qū)間避開喘振區(qū),然而在多外部因素誘導(dǎo)下,上述方法無法保證喘振不被觸發(fā),且在喘振發(fā)生后上述方法無法及時(shí)識(shí)別喘振并采取有效措施恢復(fù)故障運(yùn)行狀態(tài)。因此,急需設(shè)計(jì)快速喘振監(jiān)測(cè)和故障恢復(fù)手段,對(duì)燃料電池發(fā)動(dòng)機(jī)進(jìn)行兜底保護(hù),提升車載燃料電池系統(tǒng)全生命周期穩(wěn)定性和壽命。
本文首先基于第一性原理建立燃料電池空氣路供給集總參數(shù)模型,用于動(dòng)態(tài)模擬燃料電池空氣路供給特性和喘振現(xiàn)象。基于控制模型分析喘振特性,并設(shè)計(jì)涵蓋喘振監(jiān)測(cè)與快速保護(hù)的流量壓力自適應(yīng)控制器,最后從控制仿真和60kW系統(tǒng)實(shí)驗(yàn)測(cè)試驗(yàn)證了控制策略的有效性。
為實(shí)現(xiàn)控制策略的設(shè)計(jì),這里我們首先進(jìn)行了燃料電池空氣供應(yīng)系統(tǒng)的動(dòng)態(tài)建模和系統(tǒng)參數(shù)識(shí)別,其中包括喘振的模擬。圖.1顯示了60kW燃料電池系統(tǒng)的結(jié)構(gòu),它包含了燃料電池堆、輔助空氣管理系統(tǒng)(AMS)、氫氣管理系統(tǒng)(HMS)和熱量管理系統(tǒng)(TMS)。典型的燃料電池空氣管理系統(tǒng)(如圖.1所示)包括一個(gè)空氣壓縮機(jī)、供應(yīng)歧管、加濕器、排氣歧管和背壓閥。特別地,本研究模擬了喘振現(xiàn)象,并基于喘振仿真模型設(shè)計(jì)了防喘振策略,基于仿真模型的方法進(jìn)行策略開發(fā)既能節(jié)省了實(shí)驗(yàn)成本,又保護(hù)了燃料電池系統(tǒng)免受早期開發(fā)中可能的損害。
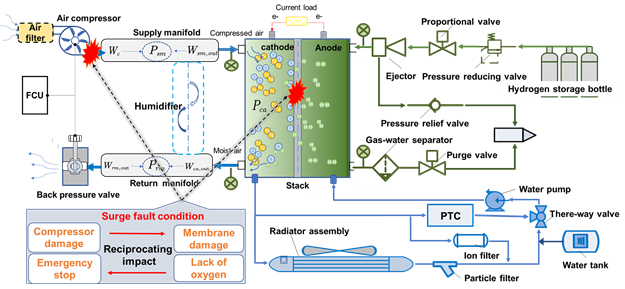
圖1 60kW燃料電池系統(tǒng)的拓?fù)鋱D
本研究采用機(jī)理結(jié)合經(jīng)驗(yàn)的方式建模,基于優(yōu)化算法對(duì)模型進(jìn)行參數(shù)辨識(shí),準(zhǔn)確地抓住了流量、壓力動(dòng)態(tài)特性以及喘振特征,為控制策略設(shè)計(jì)提供了模型基礎(chǔ),模型與實(shí)驗(yàn)結(jié)果對(duì)比如圖2所示。
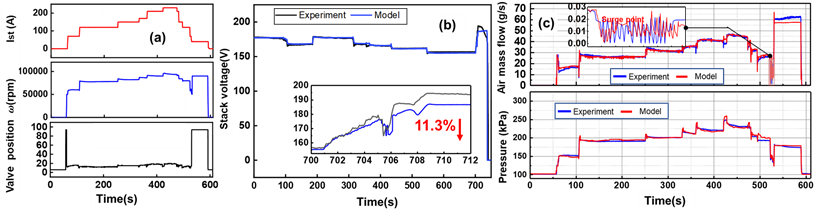
圖2 模型驗(yàn)證結(jié)果:(a)系統(tǒng)輸入(b) 系統(tǒng)輸出(c)流量-壓力對(duì)比
本研究提出了一種在線自適應(yīng)防涌流控制方法(OAASC),以改進(jìn)燃料電池的空氣供給控制。OAASC控制架構(gòu)如圖3所示,主要分為兩部分,第一部分基于雙模糊自適應(yīng)PI控制器來控制燃料電池的計(jì)量比和壓力,第二部分是基于如圖4所示的多時(shí)間域滑動(dòng)窗口方法的在線喘振檢測(cè)器,然后結(jié)合喘振時(shí)流量特征,設(shè)計(jì)了特征能量反饋,以實(shí)現(xiàn)喘振發(fā)生時(shí)快速閉環(huán)自適應(yīng)校正。
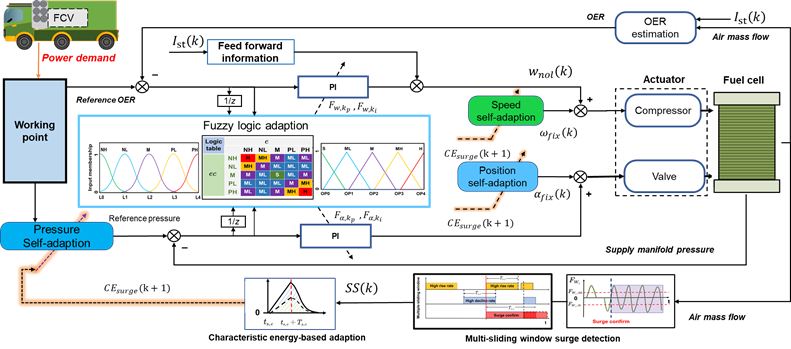
圖3 在線自適應(yīng)防涌流控制策略架構(gòu)
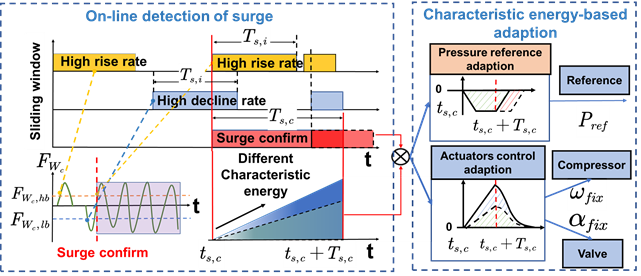
圖4 喘振監(jiān)測(cè)和快速自適應(yīng)校正機(jī)制
本研究從仿真和實(shí)驗(yàn)兩個(gè)層面驗(yàn)證了提出空策略的有效性。
仿真結(jié)果顯示,通過比較圖5中顯示的三種策略(PID,以及前饋PID)的map圖,可以看出OAASC策略的控制工況點(diǎn)與設(shè)計(jì)的工作目標(biāo)點(diǎn)高度重合,精確性較高,如圖5(d)所示。同時(shí),點(diǎn)的軌跡上有毛刺特征,這表明對(duì)條件變化的響應(yīng)較快。此外,當(dāng)工作點(diǎn)靠近喘振線時(shí),OAASC控制策略能夠及時(shí)檢測(cè)到初期的小波動(dòng)并將工作軌跡拉回到安全區(qū)域,實(shí)現(xiàn)了快速有效的喘振保護(hù)。
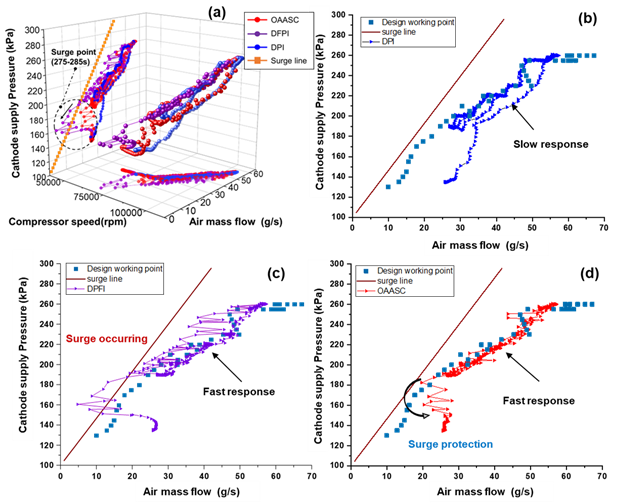
圖5 流量-壓力map圖控制結(jié)果
采用快速原型控制對(duì)提出的OAASC策略在60kW燃料電池系統(tǒng)進(jìn)行了實(shí)機(jī)測(cè)試,如圖6所示。具體地,算法基于MATLAB/SIMULINK搭建,然后編碼和燒錄到燃料電池控制單元(FCU)中實(shí)現(xiàn)系統(tǒng)閉環(huán)控制。上位機(jī)采用LabVIEW平臺(tái)進(jìn)行系統(tǒng)狀態(tài)監(jiān)控和數(shù)據(jù)采集。FCU與計(jì)算機(jī)之間以及FCU與燃料電池系統(tǒng)之間的通信分別通過控制器局域網(wǎng)(CAN)、硬連線通信(HWC)建立。
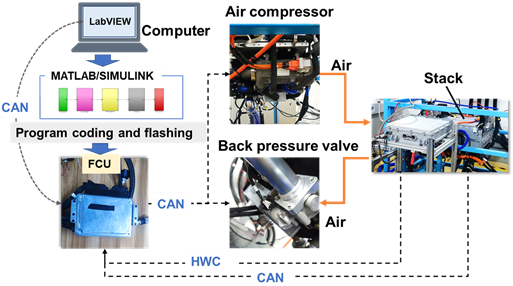
圖6 燃料電池系統(tǒng)快速原型控制過程
最后,我們基于背壓閥工作點(diǎn)特性設(shè)計(jì)了喘振觸發(fā)故障工況,設(shè)計(jì)工況下主動(dòng)且可重復(fù)地觸發(fā)了喘振,并進(jìn)行了有喘振保護(hù)和無喘振保護(hù)策略對(duì)比,以測(cè)試OAASC策略的有效性。圖7顯示了流量和壓力防喘振動(dòng)態(tài)控制實(shí)驗(yàn)結(jié)果,當(dāng)電流負(fù)載下降到60A時(shí),發(fā)生了典型的喘振,而提出的策略O(shè)AASC可以顯著縮短喘振時(shí)間;具體地,該策略可以在0.2s內(nèi)檢測(cè)到喘振發(fā)生,并在0.5s內(nèi)抑制喘振。同時(shí),使得燃料電池電壓能夠快速恢復(fù),說明缺氣現(xiàn)象也得到了快速改善,如圖8所示。
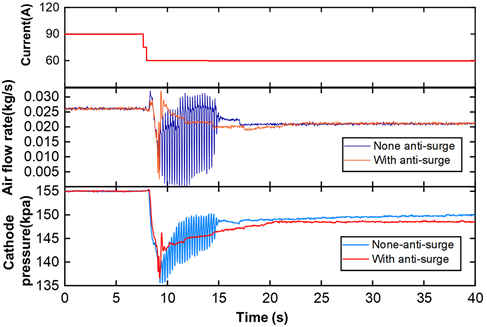
圖7 防喘振實(shí)驗(yàn)結(jié)果
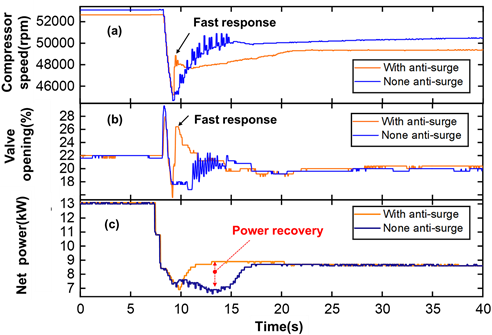
圖8 壓縮機(jī)、背壓閥控制及功率恢復(fù)結(jié)果
審核編輯:湯梓紅
-
燃料電池
+關(guān)注
關(guān)注
26文章
968瀏覽量
95610 -
發(fā)動(dòng)機(jī)
+關(guān)注
關(guān)注
33文章
2510瀏覽量
70045 -
檢測(cè)器
+關(guān)注
關(guān)注
1文章
878瀏覽量
47932
原文標(biāo)題:燃料電池系統(tǒng)在線自適應(yīng)快速喘振檢測(cè)及保護(hù)控制策略
文章出處:【微信號(hào):電源系統(tǒng)智能管控,微信公眾號(hào):電源系統(tǒng)智能管控】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論