 安信可雷達模組Rd-04的STM32驅動步驟簡析
安信可雷達模組Rd-04的STM32驅動步驟簡析
01
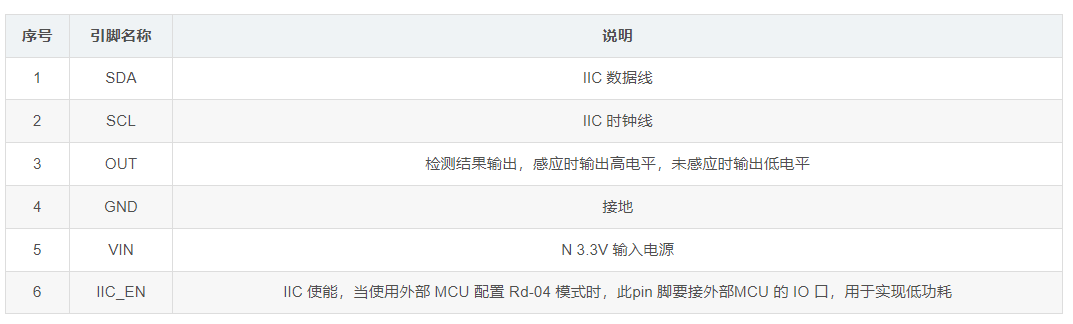
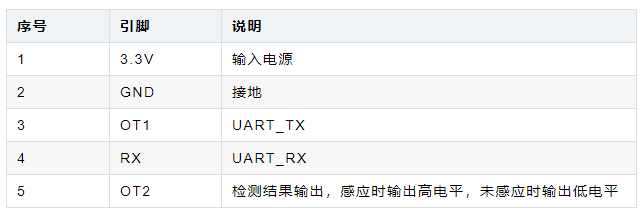
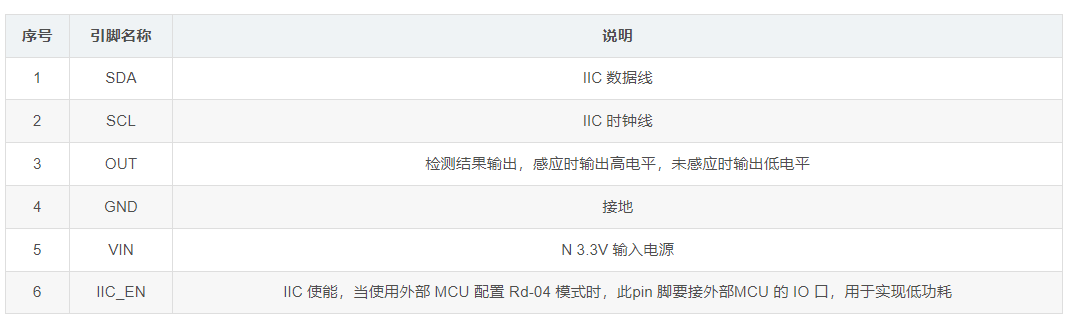
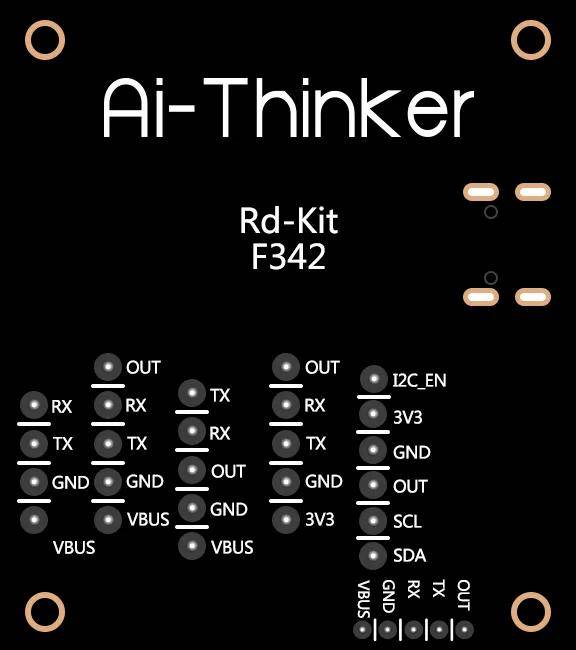
Rd-04引腳說明
Rd-04 一共引出6pin 2.0mm 的排針,引腳如下:
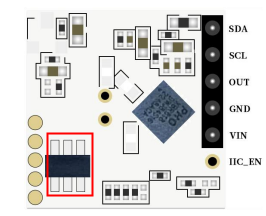
注意:
本文需要使用到I2C引腳,所以正式接線之前,需要把Rd-04的板載MCU拆掉,MCU的位置如下:
02
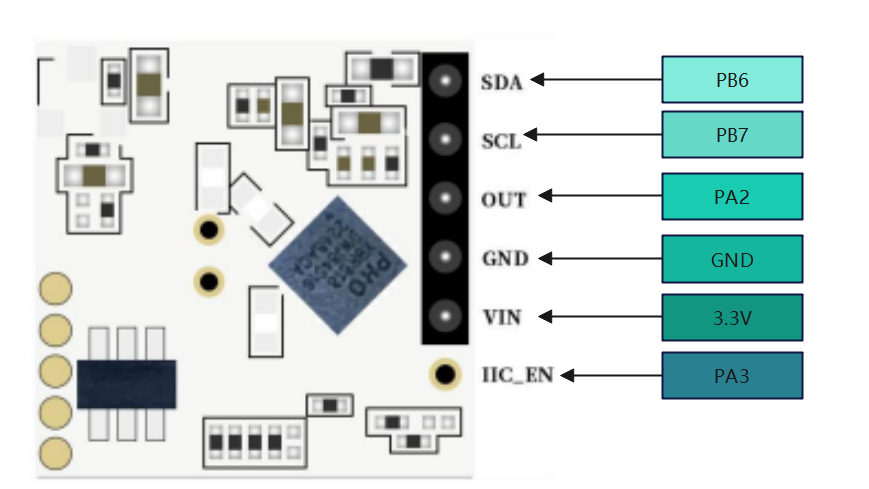
Rd-04與STM32的接線
在本次的STM32工程當中,與Rd-04的接線如下:
03
STM32驅動移植
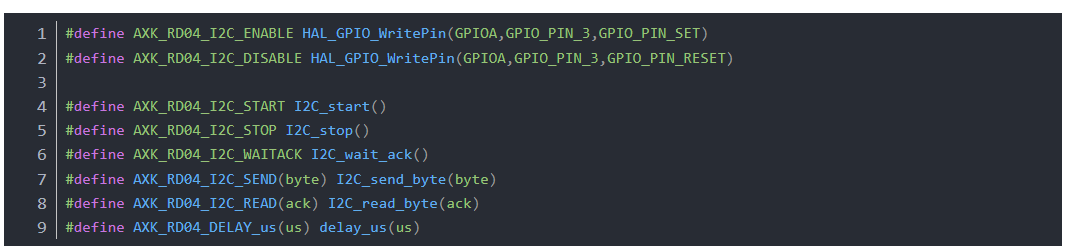
為了方便大家更快實現功能,我們開發了一個驅動庫,你只需要把I2C的驅動寫好就OK:
●Rd-04 I2C使能IO函數,Rd-04的I2C功能需要把IIC_EN引腳拉高之后才能使用,以STM32為例,使能HAL_GPIO_WritePin(GPIOA,GPIO_PIN_3,GPIO_PIN_SET),關閉:HAL_GPIO_WritePin(GPIOA,GPIO_PIN_3,GPIO_PIN_RESET)
●I2C 發送起始信號函數
●I2C 發送停止信號函數
●I2C 主機等待ACK應答函數
●I2C 發送字節函數
●I2C 讀取字節函數,這個函數需要自帶是否給從機發送ACK 參數
●微妙延時函數
完成驅動的開發之后,替換掉原來的,比如:
因為Rd-04無法實時輸出檢測數據,只有IO輸出的高低電平,所以,我們能做的也只能通過檢測Rd-04的OUT引腳輸出。
運行結果:
03
其他API說明及源碼地址
void axk_rd04_default_config(void)
Rd-04 出廠默認配置,里面的配置參數不推薦修改,建議使用其他函數修改配置
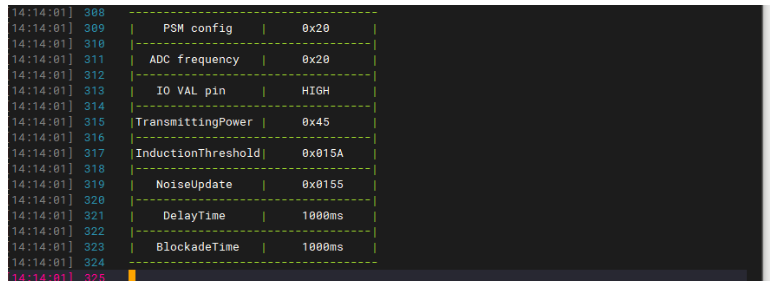
void axk_rd04_display_config(void)
輸出打印配置結果,需要支持pinrtf打印輸出
void AxkRd04SetIoValOutput(uint8_t OutputStatus)
設置IO VAL的輸出電平,即檢測到目標時應輸出的電平,默認輸出高
void AxkRd04SetWayOfWorking(rd04_psm_t PSM)
配置供電方式,默認為間歇供電,即低功耗模式
void AxkRd04SetADCSamplingFrequency(rd04_adc_sf_t ADC_SF)
配置ADC采樣頻率,默認1KHz,有1KHz、2KHz、4KHz和16KHz可選
void AxkRD04SetTransmittingPower(rd04_tpower_t Tpower)
配置發射功率。默認 RD04_TPOWER_5,即0x45,有8檔可選:
RD04_TPOWER_0~RD04_TPOWER_7
void AxkRD04SetInductionThreshold(uint16_t IndTs)
配置感應門限,默認:0x15a
void AxkRD04SetNoiseUpdate(uint16_t noiseupdate)
配置更新噪聲門限,默認:0x0155
void AxkRD04SetInductionDelayTime(uint32_t _delay_ms)
配置延時時間,單位:ms。默認100ms
void AxkRD04SetBlockadeTime(uint32_t _delay_ms)
配置鎖定時間,單位:ms。默認1000ms
審核編輯:劉清
-
mcu
+關注
關注
146文章
17123瀏覽量
350994 -
驅動器
+關注
關注
52文章
8226瀏覽量
146253 -
STM32
+關注
關注
2270文章
10895瀏覽量
355744 -
延時器
+關注
關注
1文章
36瀏覽量
15097 -
i2c總線協議
+關注
關注
0文章
6瀏覽量
6809
原文標題:安信可雷達模組Rd-04的STM32驅動教程
文章出處:【微信號:安信可科技,微信公眾號:安信可科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
雷達模組Rd-04的STM32驅動教程

安信可推出10G雷達模組Rd-04,支持感應人體微動/運動

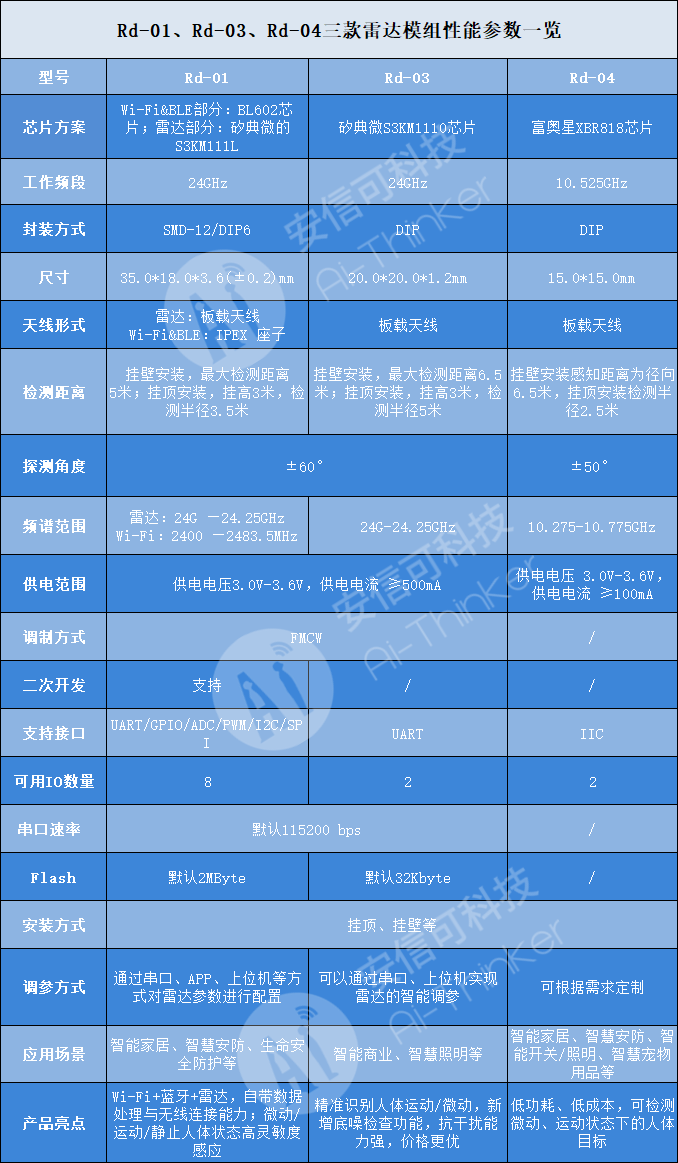
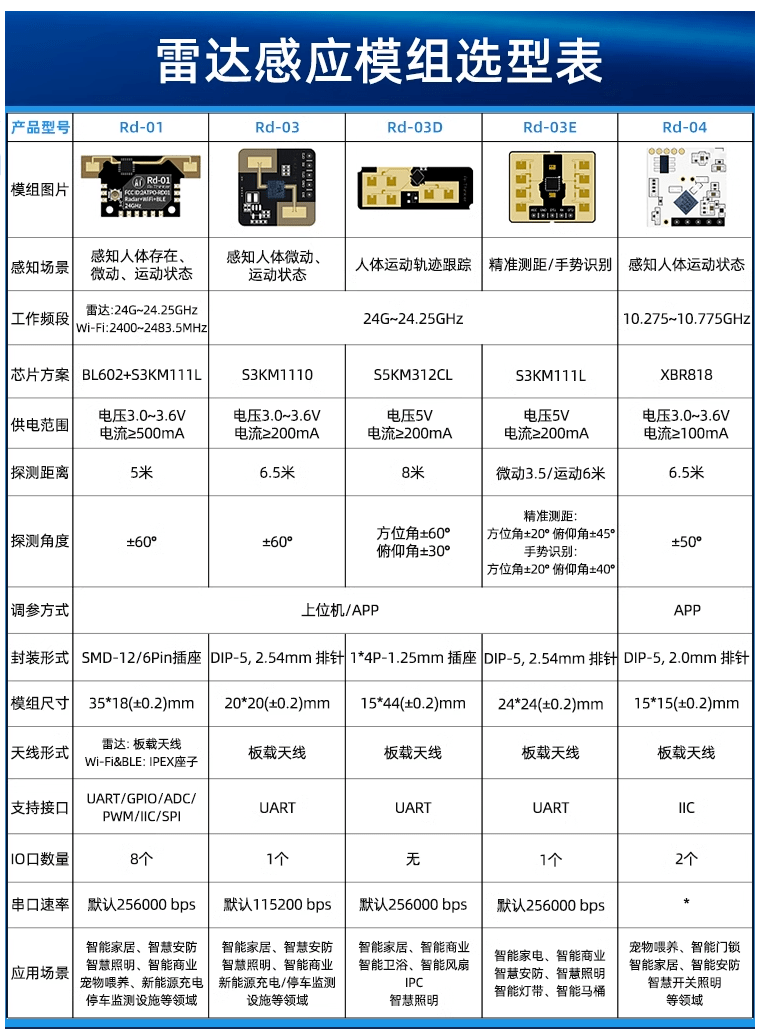
趕緊碼住!安信可24G、10G雷達模組選型看這篇就夠了!

安信可雷達模組:無人車應用可行性?
安信可雷達模組怎么選?看這篇,不踩雷!

告別接線!手機一鍵調參,Rd-Kit雷達藍牙底板,讓雷達模組使用更簡單





 工商網監
工商網監
評論