 機器視覺檢測中,如何根據分辨率,精度,公差的關系指導選型
機器視覺檢測中,如何根據分辨率,精度,公差的關系指導選型
機器視覺是人工智能正在快速發展的一個分支。簡單說來,機器視覺就是用機器代替人眼來做測量和判斷。機器視覺系統是通過機器視覺產品(即圖像攝取裝置,分CMOS和CCD兩種)將被攝取目標轉換成圖像信號,傳送給專用的圖像處理系統,得到被攝目標的形態信息,根據像素分布和亮度、顏色等信息,轉變成數字化信號;圖像系統對這些信號進行各種運算來抽取目標的特征,進而根據判別的結果來控制現場的設備動作。機器視覺系統的特點是提高生產的柔性和自動化程度。在一些不適合于人工作業的危險工作環境或人工視覺難以滿足要求的場合,常用機器視覺來替代人工視覺;同時在大批量工業生產過程中,用人工視覺檢查產品質量效率低且精度不高,用機器視覺檢測方法可以大大提高生產效率和生產的自動化程度。而且機器視覺易于實現信息集成,是實現計算機集成制造的基礎技術。
在實際場景中,機器視覺檢測設備在檢測產品時的一些不穩定因素,會直接導致檢測精度與效率受到很大的影響。下面和大家一起分析如何根據分辨率,精度,公差的關系指導選型。
分辨率(Resolution)
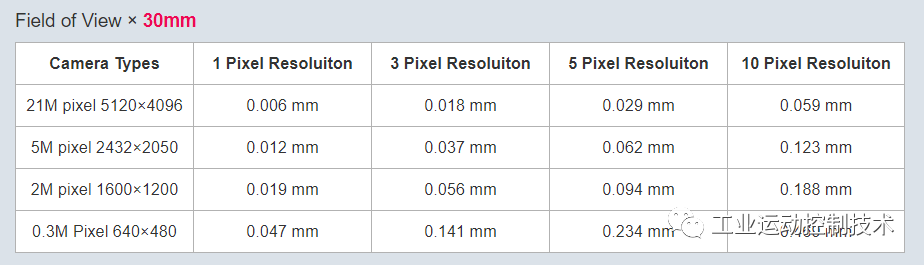
計算公式:分辨率 = 視野(Field of View)/像素(Pixel) 比如我要看的產品大小是30mm*10MM,使用200萬像素(1600pixel*1200pixel)的相機。因為產品是長條形,為了把產品都放入到視野內,我們計算分辨率的時候要考慮長邊對應,此時分辨率為:分辨率 = 30mm/1600Pixel = 0.019mm/Pixel
精度(Accuracy)
計算公式:精度 = 分辨率 x 有效像素
精度的單位是mm。根據產品表面和照明狀況的不同,我們可以通過放大圖像觀察辨別穩定像素的個數,從而得出精度。如果條件不允許實際測試觀察,一般的規律是,如果使用正面打光,有效像素為1個,使用背光,有效像素為0.5個。
這個例子我們取1 Pixel,得到精度為0.019mm約等于0.02mm。
機器視覺系統的定位精度如何計算?
假如是30萬像素的攝像機,監控的面積為640x480mm,其精度是不是就是1mm了?
30W相機分辨率640*480 正常這樣算:用最長的邊除去監控面積最長的邊 即可,所以精度基本上是1mm,這個是理論值,如果你做測量或者表面劃傷檢測,肯定不準確,一個像素有可能無法凸顯特征。
公差(Tolerance)
一般情況下,精度和公差的對應關系如下:

對一個項目來講,我們是先從圖紙上讀到公差的要求。然后再根據上述關系,反推得出我們需要多少像素的相機。
測量時,首先要考慮的幾大方面的有:相機、鏡頭、光源。
選擇要考慮的因素有很大,這里依據一個經手的項目介紹一下精度方面需要考慮的問題。
項目要求:像素精度0.05mm、測量誤差正負0.15mm。首先介紹一下相關的概念:
像素精度:一個像素在真實世界代表的距離,即拍攝視野/分辨率。例如我所使用的大華500萬相機,分辨率2592*2048,在視野中長的一邊100mm,即可拍到100mm的物體,那么在這一方向的像素精度為100/2592mm約為0.0386mm。
測量誤差:使用算法測量的距離/長度與真實值的誤差。
亞像素精度:亞像素精度是指相鄰兩像素之間細分情況,輸入值通常為二分之一,三分之一或四分之一。即每個像素將被分為更小的單元從而對這些更小的單元實施插值算法。
例如,如果選擇四分之一,就相當于每個像素在橫向和縱向上都被當作四個像素來計算。實際測量或檢測時需要考慮的還有很多,例如幀率、曝光、增益等。
-
機器視覺
+關注
關注
162文章
4372瀏覽量
120313 -
檢測
+關注
關注
5文章
4488瀏覽量
91471 -
人工智能
+關注
關注
1791文章
47274瀏覽量
238468
發布評論請先 登錄
相關推薦
HDMI接口支持哪些視頻分辨率
設計基于機器視覺的高分辨率雙遠心物鏡

Moritex 5X 高分辨率遠心鏡頭 助力晶圓檢測

VR顯示器分辨率的選擇
伺服編碼器分辨率是什么意思
伺服編碼器分辨率越高越快嗎?

電流探頭的分辨率和靈敏度有關系嗎?

華為pockets屏幕分辨率是多少
編碼器分辨率是什么意思 編碼器分辨率和脈沖數的關系

電容觸摸屏的分辨率怎么調
關于直線電機模組分辨率、定位精度和重復定位精度淺談
淺談相機的圖像分辨率






 工商網監
工商網監
評論