") 淺析基于超構(gòu)表面的三維成像技術(shù)
淺析基于超構(gòu)表面的三維成像技術(shù)
三維成像技術(shù)具有強(qiáng)大的精細(xì)化空間數(shù)據(jù)描述能力,在消費(fèi)電子、自動(dòng)駕駛、機(jī)器視覺(jué)和虛擬現(xiàn)實(shí)等領(lǐng)域已成為最關(guān)鍵的傳感技術(shù)之一。現(xiàn)有的三維成像技術(shù)受到傳統(tǒng)折射元件和衍射元件的物理機(jī)制限制,難以滿足設(shè)備小型化、集成化、多功能、大視場(chǎng)、大數(shù)值孔徑、高分辨等性能要求。超構(gòu)表面作為由亞波長(zhǎng)納米天線陣列構(gòu)成的智能表面,能夠?qū)崿F(xiàn)對(duì)光場(chǎng)的振幅、相位、偏振等參量的人為調(diào)控,具有體積小、高空間帶寬積、高效率、多功能、大視場(chǎng)等優(yōu)勢(shì),有望成為新一代光學(xué)元件服務(wù)于三維成像技術(shù)。
據(jù)麥姆斯咨詢報(bào)道,近期,北京理工大學(xué)光電學(xué)院的科研團(tuán)隊(duì)在《激光與光電子學(xué)進(jìn)展》期刊上發(fā)表了以“基于超構(gòu)表面的三維成像技術(shù)”為主題的文章。該文章第一作者為景曉麗,通訊作者為黃玲玲教授。
本文綜述了基于超構(gòu)表面的三維成像技術(shù)進(jìn)展,在超構(gòu)表面的物理機(jī)制和應(yīng)用優(yōu)勢(shì)的分析基礎(chǔ)上,詳細(xì)介紹了超構(gòu)表面在三維成像技術(shù)例如結(jié)構(gòu)光技術(shù)、飛行時(shí)間法、光場(chǎng)成像和點(diǎn)擴(kuò)散函數(shù)工程中的應(yīng)用和表現(xiàn),總結(jié)和展望了基于超構(gòu)表面的三維成像技術(shù)面臨的挑戰(zhàn)和未來(lái)發(fā)展方向。
超構(gòu)表面的物理機(jī)制與應(yīng)用優(yōu)勢(shì)
超構(gòu)表面的物理機(jī)制
目前已報(bào)道的超構(gòu)表面大致基于三類(lèi)設(shè)計(jì)思想:共振相位超構(gòu)表面、傳播相位超構(gòu)表面、幾何相位超構(gòu)表面。
共振相位超構(gòu)表面于2011年由哈佛大學(xué)的Capasso課題組首次提出,利用局部表面等離激元諧振響應(yīng)調(diào)控天線輻射場(chǎng)的相位,從而在亞波長(zhǎng)尺度實(shí)現(xiàn)對(duì)光場(chǎng)的調(diào)控。如圖1(a)所示,使用V型天線實(shí)現(xiàn)對(duì)表面相位的不連續(xù)調(diào)控,該結(jié)構(gòu)的相位調(diào)控自由度為臂長(zhǎng)h和夾角Δ,掃描得到高效率、涵蓋0~2π相位調(diào)制的結(jié)構(gòu)參數(shù),如圖1(b)所示。金屬共振超表面通常采用V型、Y型和C型來(lái)構(gòu)建更復(fù)雜的超原子。由于金屬超表面的效率和工作波段非常局限,研究人員提出基于米共振和法珀共振的全介質(zhì)超表面,也稱(chēng)為惠更斯超表面,該超表面的厚度遠(yuǎn)遠(yuǎn)小于工作波長(zhǎng),具有較高的工作效率和較低的損耗。
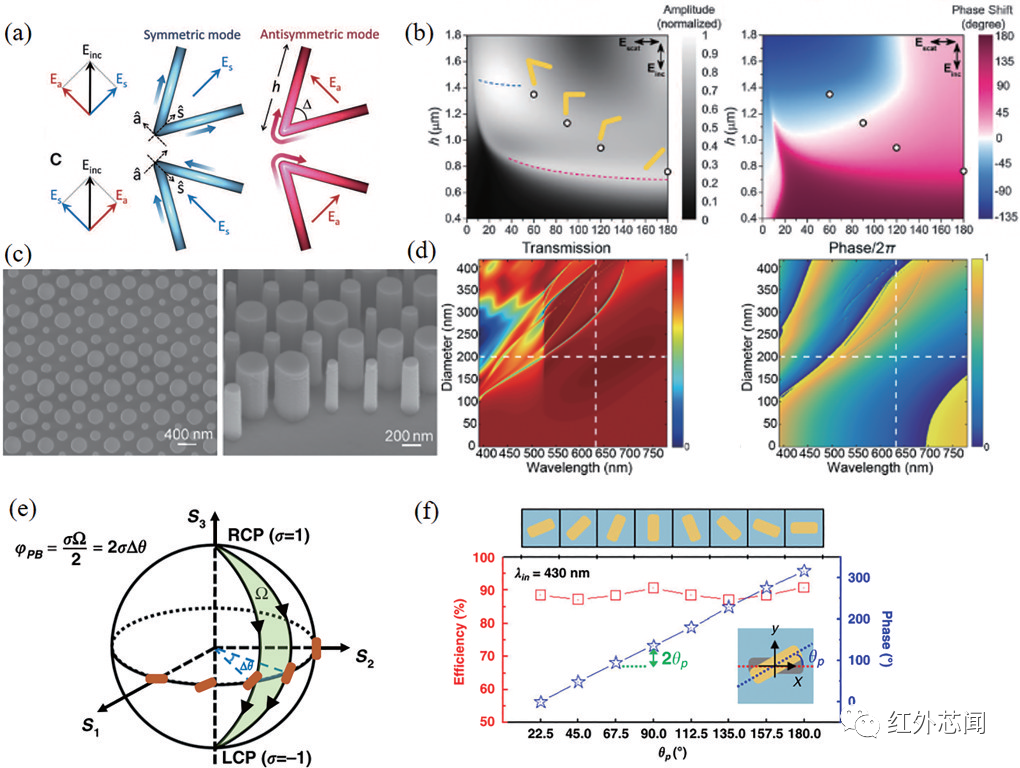
圖1 超構(gòu)表面的物理機(jī)制和相位調(diào)控
2018年,F(xiàn)an等根據(jù)傳播相位的設(shè)計(jì)方法設(shè)計(jì)一個(gè)基于SiN材料的大數(shù)值孔徑可見(jiàn)光超透鏡,其結(jié)構(gòu)參數(shù)電鏡圖、掃描振幅和相位圖如圖1(c)、(d)所示。
幾何相位起源于1956年,印度拉曼研究所Pancharatnam首先提出當(dāng)平面結(jié)構(gòu)相對(duì)于z軸逆時(shí)針旋轉(zhuǎn)一個(gè)角度Δθ時(shí),交叉偏振散射會(huì)產(chǎn)生一個(gè)額外的相位因子exp (i2Δθ)exp(i2φ)。隨后1984年,英國(guó)布里斯托爾大學(xué)的Berry闡釋該相位的產(chǎn)生源于光子態(tài)在高緯度空間中發(fā)生絕熱演化,稱(chēng)為幾何相位,也稱(chēng)作Pancharatnam-Berry(PB)相位。如圖1(e)所示,PB相位對(duì)應(yīng)于在龐加萊球上兩點(diǎn)之間路徑引入的額外相位差值,等于各項(xiàng)微結(jié)構(gòu)旋轉(zhuǎn)角的2倍。因此,幾何相位超構(gòu)表面的相位調(diào)控自由度為微結(jié)構(gòu)的空間取向角,可通過(guò)掃描長(zhǎng)寬參數(shù)得到高效率的微結(jié)構(gòu)參數(shù),同時(shí)旋轉(zhuǎn)整體微結(jié)構(gòu)獲得需要的相位調(diào)控,如圖1(f)所示。由此可見(jiàn),幾何相位僅由入射光的偏振狀態(tài)和微結(jié)構(gòu)的旋轉(zhuǎn)角度決定,因此幾何超構(gòu)表面具有寬帶效應(yīng)的特點(diǎn)。
超構(gòu)表面的應(yīng)用優(yōu)勢(shì)
超構(gòu)表面利用亞波長(zhǎng)尺度下光與物質(zhì)相互作用的物理機(jī)制,通過(guò)合理選擇和優(yōu)化納米結(jié)構(gòu)的形狀、大小和工程排布,對(duì)局部電磁場(chǎng)的振幅、相位、偏振、波長(zhǎng)和軌道角動(dòng)量等特性進(jìn)行操縱,為實(shí)現(xiàn)光場(chǎng)調(diào)控提供了豐富的設(shè)計(jì)自由度。總體而言,在基于超構(gòu)表面的應(yīng)用技術(shù)中,超構(gòu)表面具有系統(tǒng)緊湊、多物理量調(diào)控、大視場(chǎng)高效率等顯著特點(diǎn),有望成為下一代被廣泛應(yīng)用的新型光學(xué)器件。
基于超構(gòu)表面的光學(xué)元件能夠滿足儀器的小型化,降低光學(xué)系統(tǒng)的尺寸、重量和功率等要求,在現(xiàn)代消費(fèi)類(lèi)光電子設(shè)備、無(wú)人機(jī)和空間應(yīng)用中至關(guān)重要。超構(gòu)元件的緊湊性主要基于超構(gòu)表面的平面特性實(shí)現(xiàn)器件、系統(tǒng)的小型化和集成化,如圖2(a)所示,單片惠更斯超透鏡組成視場(chǎng)角30°的緊湊型近紅外成像系統(tǒng)。多片平面式超構(gòu)表面可以實(shí)現(xiàn)傳統(tǒng)光學(xué)系統(tǒng)的折疊,充分利用設(shè)計(jì)空間,如圖2(b)所示,由多片超構(gòu)表面組成的小型化平面光譜儀尺寸僅為1.6 mm×1.6 mm×1.7 mm。超構(gòu)表面不僅可以實(shí)現(xiàn)光學(xué)系統(tǒng)的空間折疊,還可以與光源、探測(cè)器集成進(jìn)一步提高其系統(tǒng)的緊湊性,如圖2(c)所示,單片超表面集成互補(bǔ)金屬氧化物半導(dǎo)體(CMOS)探測(cè)器構(gòu)成掌上顯微鏡。基于超構(gòu)元件的緊湊性另一方面體現(xiàn)在單層超構(gòu)表面能夠設(shè)計(jì)多種光學(xué)功能。超構(gòu)表面是由納米結(jié)構(gòu)陣列組成的離散光學(xué)元件,可以在單層中交織多種功能,如圖2(d)所示,共孔徑交錯(cuò)式超構(gòu)表面實(shí)現(xiàn)多功能相位剖面的疊加,這在傳統(tǒng)光學(xué)中是不可能實(shí)現(xiàn)的。
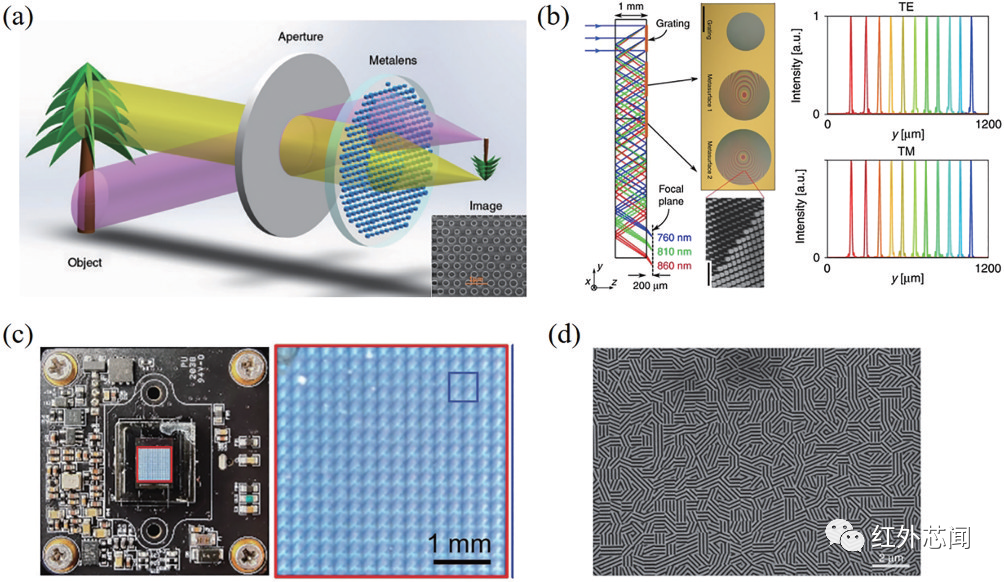
圖2 超構(gòu)元件的緊湊型系統(tǒng)
超構(gòu)表面的另一個(gè)優(yōu)勢(shì)是多維度物理量復(fù)用,基于亞波長(zhǎng)單元結(jié)構(gòu),超構(gòu)表面能夠?qū)崿F(xiàn)偏振、相位、角度和軌道角動(dòng)量這些光隱藏信息的可視化,結(jié)合前述單個(gè)超構(gòu)元件集成多種功能,實(shí)現(xiàn)了傳統(tǒng)光學(xué)不易實(shí)現(xiàn)的功能和信息容量。因此,超構(gòu)元件得以在全息顯示、多功能超透鏡等領(lǐng)域展示出驚人的應(yīng)用優(yōu)勢(shì)。
超構(gòu)表面的光束控制是基于亞波長(zhǎng)空間尺寸上裁剪反射光或透射光波前,因此多級(jí)衍射被抑制,波前操縱在理論上具有接近1的效率和數(shù)值孔徑(NA),這為大視場(chǎng)、大NA和高效率的工業(yè)設(shè)計(jì)提供了誘人的理論支撐。隨著微納加工技術(shù)的不斷進(jìn)步,超構(gòu)元件的效率進(jìn)一步提升,會(huì)進(jìn)一步推進(jìn)超構(gòu)元件在工業(yè)界、消費(fèi)電子界的應(yīng)用。
基于超構(gòu)表面的三維成像技術(shù)
三維成像技術(shù)通過(guò)設(shè)計(jì)主動(dòng)(如結(jié)構(gòu)光照明、飛行時(shí)間法等)或被動(dòng)(如雙目視覺(jué)、光場(chǎng)技術(shù)、點(diǎn)擴(kuò)散函數(shù)工程)的編碼方式,使得位于不同深度的物體具有不同的強(qiáng)度響應(yīng),從而實(shí)現(xiàn)深度信息的獲取。這些三維成像技術(shù)在成像場(chǎng)景、成像視場(chǎng)、深度成像范圍、空間分辨率、深度分辨率和速度上表現(xiàn)各異。首先,成像場(chǎng)景與三維成像的主動(dòng)或被動(dòng)模式有關(guān)。相較于被動(dòng)模式,主動(dòng)成像由于可以額外投射可編碼圖案,在暗光、低紋理目標(biāo)物體的環(huán)境中更有優(yōu)勢(shì),但對(duì)于高反光物體和高透過(guò)率物體,主動(dòng)成像則常常因?yàn)橄鄼C(jī)局部過(guò)曝和反射圖案信噪比過(guò)低等原因,無(wú)法獲得全視場(chǎng)三維點(diǎn)云和精確點(diǎn)云數(shù)據(jù)。
成像視場(chǎng)和空間分辨率是描述三維成像中二維空間的性能指標(biāo)。成像視場(chǎng)是指能夠?qū)崿F(xiàn)三維成像的場(chǎng)景大小,一般用視場(chǎng)角表示,主要取決于各種三維成像技術(shù)中獲取信息量的空間大小,例如主動(dòng)式技術(shù)中依賴于投射端的視場(chǎng),被動(dòng)式技術(shù)中依賴于拍攝端的視場(chǎng)大小。空間分辨率是指成像場(chǎng)景中可被區(qū)分的最小空間尺寸,一般用不同深度處的尺寸單位例如毫米或者角度分辨率表示,空間分辨率決定了三維重建數(shù)據(jù)的密度,是描述測(cè)量空間的重要參數(shù)。
在散斑型結(jié)構(gòu)光三維成像和TOF法技術(shù)中,空間分辨率依賴于投射點(diǎn)云數(shù)量,在光場(chǎng)技術(shù)中,空間分辨率依賴于拍攝相機(jī)的分辨率和微透鏡個(gè)數(shù),在PSF技術(shù)中,空間分辨率依賴于PSF的空間特性。深度成像范圍和深度分辨率是描述三維成像在深度方向上的性能指標(biāo)。深度成像范圍是在成像視場(chǎng)內(nèi)能夠獲取深度的距離最小值和最大值構(gòu)成的深度空間,在結(jié)構(gòu)光三維成像中一般依賴于投射端和拍攝端共同作用下能夠清晰成像的范圍,在TOF技術(shù)中依賴于光源能量和調(diào)制模式,光場(chǎng)技術(shù)中依賴于光場(chǎng)恢復(fù)算法中能夠被解算出的深度范圍,與三維重建算法和微透鏡參數(shù)有關(guān),PSF技術(shù)中依賴于PSF整形的深度區(qū)域和算法解算區(qū)間。
深度分辨率是指成像視場(chǎng)內(nèi)深度方向可被區(qū)分的最小距離,一般用不同深度處的距離單位(例如毫米)表示,深度分辨率是深度成像的重要性能參數(shù)。結(jié)構(gòu)光三維成像中深度分辨率依賴于拍攝端焦距和系統(tǒng)基線,TOF技術(shù)依賴于光源調(diào)制模式和調(diào)制參數(shù),光場(chǎng)技術(shù)依賴于微透鏡在系統(tǒng)的位置以及微透鏡的大小,PSF技術(shù)依賴于PSF隨深度的響應(yīng)和深度解算算法。
三維成像的速度主要有兩方面因素,一方面是光機(jī)硬件設(shè)備對(duì)速度的影響,例如結(jié)構(gòu)光和TOF技術(shù)在多次拍攝模式下,需要考慮投射圖案的幀速問(wèn)題,一方面是硬件平臺(tái)和算法邏輯的影響,結(jié)構(gòu)光需要大量的圖像匹配運(yùn)算,而TOF一次運(yùn)算可以直接獲得點(diǎn)對(duì)應(yīng)的深度,在單點(diǎn)運(yùn)算上要優(yōu)于結(jié)構(gòu)光技術(shù),光場(chǎng)技術(shù)的深度解算分為視覺(jué)類(lèi)匹配算法和凸優(yōu)化算法,在速度變現(xiàn)上各異,PSF工程大多依賴于正則化的凸優(yōu)化算法,本文重點(diǎn)討論超構(gòu)表面器件在TOF技術(shù)中掃描幀速的表現(xiàn),算法對(duì)深度解算的影響不過(guò)多探討。
最近,納米光子學(xué)的最新進(jìn)展被認(rèn)為是傳統(tǒng)激光雷達(dá)系統(tǒng)的支持甚至替代技術(shù)。特別是,一些小型化的光束轉(zhuǎn)向平臺(tái),如芯片規(guī)模的光學(xué)相控陣和基于超表面的平面光學(xué)設(shè)備,可以切實(shí)縮小設(shè)備占用空間。除此之外,納米光子器件還可以在信息容量方面提供成像能力進(jìn)而提升成像視場(chǎng)、空間分辨率等。本文回顧了基于超構(gòu)表面的結(jié)構(gòu)光技術(shù)、TOF法技術(shù)、光場(chǎng)技術(shù)和PSF技術(shù)。
結(jié)構(gòu)光三維成像技術(shù)
結(jié)構(gòu)光三維成像技術(shù)是一種非常流行的非接觸式三維形貌測(cè)量技術(shù),其具有硬件配置簡(jiǎn)單、測(cè)量精度高、空間分辨率高、速度快、成本低等優(yōu)點(diǎn),在工業(yè)和消費(fèi)電子領(lǐng)域得到廣泛應(yīng)用。結(jié)構(gòu)光技術(shù)本質(zhì)上是基于三角測(cè)量原理,由光源向被測(cè)物體投影一定規(guī)則和模式編碼的圖像,編碼圖案受到物體表面形狀的調(diào)制而產(chǎn)生形變。帶有形變的結(jié)構(gòu)光被另外一個(gè)位置的相機(jī)拍攝,通過(guò)預(yù)先標(biāo)定好的相機(jī)與投影光源之間的位置關(guān)系和結(jié)構(gòu)光圖案形變信息推演出待測(cè)物體的三維信息。散斑編碼是結(jié)構(gòu)光技術(shù)中常見(jiàn)的編碼圖案,一般要求局部圖案具有全局唯一性,而且散斑的數(shù)量決定了可解碼的信息量,影響待測(cè)數(shù)據(jù)的空間分辨率。超構(gòu)表面具有亞波長(zhǎng)的特征尺寸,多物理量光場(chǎng)調(diào)控的特點(diǎn),因此用做結(jié)構(gòu)光投射器具有大視場(chǎng)、高密度信息的優(yōu)勢(shì)。
Ni等提出使用偏振無(wú)關(guān)的超構(gòu)表面衍射元件,實(shí)現(xiàn)了具有120°×120°視場(chǎng)角,強(qiáng)度均勻且高效率的點(diǎn)云陣列投影,如圖3(a)所示。超構(gòu)表面的達(dá)曼光柵具有衍射光學(xué)元件(DOE)無(wú)法達(dá)到的視場(chǎng)角,有望成為下一代分束器元件。基于幾何相位超構(gòu)表面全息再現(xiàn)的共軛特性,Li等提出基于非晶硅幾何相位超構(gòu)表面的全空間點(diǎn)云投射器,如圖3(b)所示,利用偏振復(fù)用的特點(diǎn)同時(shí)實(shí)現(xiàn)透射和反射空間的隨機(jī)點(diǎn)云,300 μm×300 μm的超構(gòu)表面產(chǎn)生點(diǎn)云數(shù)量為4404個(gè)。高密度的圖案與超構(gòu)表面的面積有關(guān),隨著光刻技術(shù)的發(fā)展,Li等通過(guò)浸沒(méi)式光刻技術(shù)在12英寸玻璃晶圓上制備了尺寸為2.5 mm×2.5 mm的像素化超構(gòu)表面光束偏轉(zhuǎn)器,如圖3(c)所示,像素化超構(gòu)表面的每個(gè)像素由一組含有特定梯度相位的超構(gòu)表面組成,具有特定出射角度,結(jié)合大面積光刻制造技術(shù),隨機(jī)化的光束偏折形成了隨機(jī)點(diǎn)云用于結(jié)構(gòu)光三維成像。
基于超構(gòu)表面的平面性、易集成等優(yōu)點(diǎn),Xie等提出集成超構(gòu)表面的垂直腔面發(fā)射激光器(VCSEL),如圖3(d)所示,超構(gòu)表面集成在激光出光口處,通過(guò)精心設(shè)計(jì)的單元結(jié)構(gòu)實(shí)現(xiàn)激光光束整形。通過(guò)VCSEL陣列集成不同功能的超構(gòu)表面實(shí)現(xiàn)功能切換,使其成為一個(gè)主動(dòng)器件,有望成為下一代點(diǎn)云投射器件。隨后,Wang等提出使用超構(gòu)表面形成不同偏折方向的分束器,如圖3(e)所示,擴(kuò)展VCSEL集成超構(gòu)表面的功能。超構(gòu)表面的高空間帶寬積使其具有大信息容量的應(yīng)用潛力,如圖3(f)所示,Kim等實(shí)現(xiàn)了180°全視場(chǎng)約10 K的點(diǎn)列投影,結(jié)合雙目相機(jī)和立體匹配算法實(shí)現(xiàn)三維成像,同時(shí)Kim證明了結(jié)合納米壓印技術(shù)實(shí)現(xiàn)該技術(shù)量產(chǎn)的可行性。
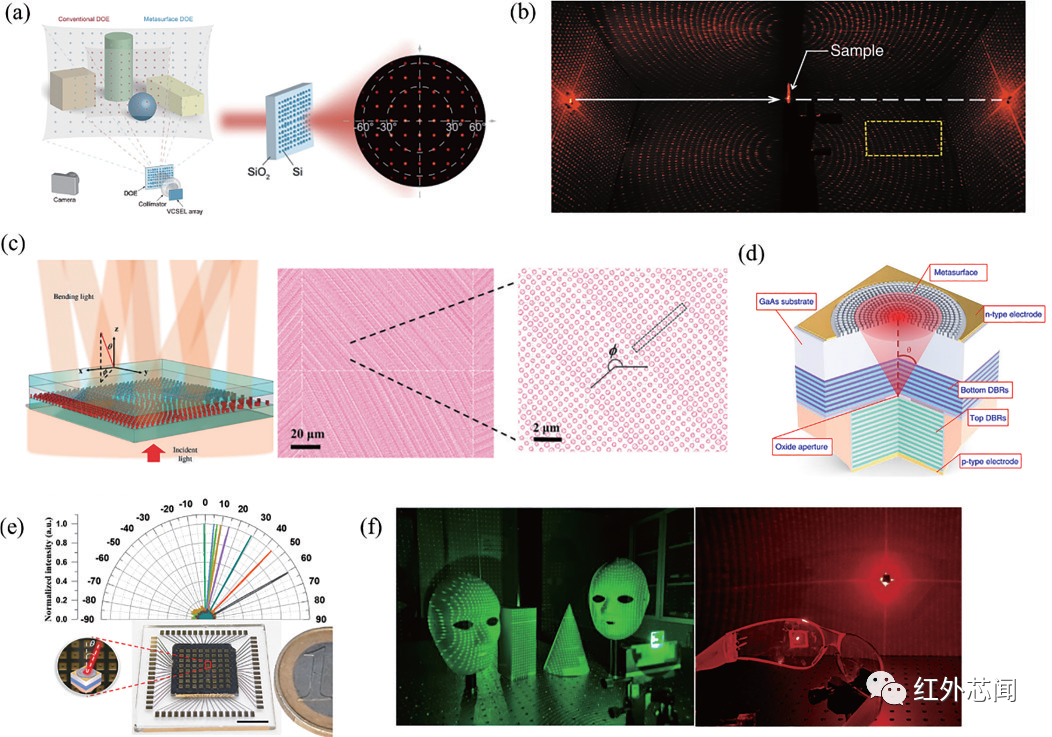
圖3 基于超構(gòu)表面的結(jié)構(gòu)光點(diǎn)云投射器
基于超構(gòu)表面的結(jié)構(gòu)光三維成像技術(shù)目前多數(shù)采用超構(gòu)表面作為點(diǎn)云投射器,亞波長(zhǎng)單元尺寸的衍射效應(yīng)使投影視場(chǎng)可達(dá)到整個(gè)空間,這是傳統(tǒng)光學(xué)元件無(wú)法比擬的優(yōu)勢(shì)。同時(shí)超構(gòu)表面投射的點(diǎn)云數(shù)量依賴于微結(jié)構(gòu)的個(gè)數(shù),相比于DOE,在相同尺寸下超構(gòu)表面具有更大的點(diǎn)云密度,這為高空間分辨率的結(jié)構(gòu)光三維成像提供了基礎(chǔ)支持。除此之外,超構(gòu)表面作為納米光子平面器件,其高度集成性打破了傳統(tǒng)點(diǎn)云投射裝置的結(jié)構(gòu)復(fù)雜性,使整個(gè)投影模組達(dá)到芯片級(jí),具有更好的結(jié)構(gòu)穩(wěn)定性,降低對(duì)準(zhǔn)誤差等精密工藝引入的制造成本。由于結(jié)構(gòu)光三維成像技術(shù)屬于面投射技術(shù),投射點(diǎn)云數(shù)量的增多同時(shí)會(huì)帶來(lái)單個(gè)點(diǎn)云能量的降低,因此基于超構(gòu)表面的三維成像技術(shù)適用于較短工作距離(300 mm)成像例如人臉識(shí)別等。相較于傳統(tǒng)三維成像技術(shù),基于超構(gòu)表面的三維成像技術(shù)具有不虛焦的特點(diǎn),增加光源能量可以擴(kuò)展工作距離,這為結(jié)構(gòu)光技術(shù)在工作距離方面提供了應(yīng)用拓展,未來(lái)可以應(yīng)用在飛行器測(cè)繪等領(lǐng)域。
飛行時(shí)間法
在學(xué)術(shù)界和工業(yè)界,高效、可靠、快速的激光雷達(dá)系統(tǒng)的研究正在蓬勃發(fā)展。激光雷達(dá)技術(shù)應(yīng)用于各種行業(yè),包括自動(dòng)駕駛汽車(chē)、人工智能機(jī)器人、全自動(dòng)和無(wú)人工廠,以及大氣或降雨觀測(cè)等。激光雷達(dá)基于TOF技術(shù),最重要的性能參數(shù)包括測(cè)量范圍、水平和垂直視場(chǎng)、幀速、點(diǎn)數(shù)和功耗等。目前大多數(shù)采用宏觀機(jī)械掃描或微機(jī)電系統(tǒng)(MEMS)方法的產(chǎn)品,宏觀機(jī)械掃描儀的測(cè)量范圍通常在100~250 m,水平視場(chǎng)是完整的360°,而垂直視場(chǎng)取決于通道的數(shù)量,通常為30°~40°,獲得的最佳空間角分辨率為0.2°×0.1°。數(shù)據(jù)速率,定義為每秒可識(shí)別點(diǎn)的數(shù)量,范圍為每秒1.3×10?~2.4×10?點(diǎn)。目前傳統(tǒng)的TOF產(chǎn)品存在視場(chǎng)受限、功耗大、易損耗、笨重等問(wèn)題。基于超構(gòu)表面的激光雷達(dá)系統(tǒng)其工作原理依賴于亞波長(zhǎng)相位控制與納米結(jié)構(gòu)元件,允許較高的精度控制和較大的調(diào)制波前的方向角。光束掃描的主動(dòng)超構(gòu)表面器件通常將超構(gòu)表面與活性介質(zhì)結(jié)合,如透明導(dǎo)電氧化物(TCO)材料、多量子阱(MQW)、微機(jī)電系統(tǒng)(MEMS)、液晶(LC)或相變材料等。主動(dòng)可調(diào)超構(gòu)表面設(shè)備有望替代點(diǎn)掃描或線掃描激光雷達(dá)組件,解決傳統(tǒng)機(jī)械組件中的機(jī)械損耗大、振動(dòng)敏感等問(wèn)題。作為全固態(tài)激光雷達(dá)的一個(gè)有前途的候選方案,基于超表面的激光雷達(dá)原則上可以為特定應(yīng)用量身定制,以滿足多波長(zhǎng)操作、測(cè)距、分辨率、偏振、深度精度、視場(chǎng)、生產(chǎn)可擴(kuò)展性和低成本的片上集成的要求。
基于TCO材料的主動(dòng)可調(diào)超構(gòu)表面
基于TCO材料的主動(dòng)可調(diào)超構(gòu)表面,通過(guò)控制活性層中的電荷濃度實(shí)現(xiàn)有效折射率的調(diào)節(jié),從而引起超構(gòu)表面的相位變化完成光束的動(dòng)態(tài)轉(zhuǎn)向。此類(lèi)型超構(gòu)表面使用金屬氧化物半導(dǎo)體(MOS)調(diào)制器,具有低電壓偏置(幾伏)的高速調(diào)制(約為10 MHz)的優(yōu)勢(shì)。氧化銦錫(ITO)是最常用的TCO材料之一,在近零區(qū)域(通常為近紅外波段)時(shí),它的介電常數(shù)在?1~1之間,在電荷積累層附近電場(chǎng)約束進(jìn)一步增強(qiáng),這十分有利于構(gòu)建電調(diào)諧納米光子器件。
Huang等提出并驗(yàn)證一種工作在1550 nm波長(zhǎng)下的柵極可調(diào)超構(gòu)表面,可實(shí)現(xiàn)對(duì)反射場(chǎng)的相位和振幅動(dòng)態(tài)電控可調(diào)。如圖4(a)所示,MOS調(diào)制器由頂部Au天線的柵極、Al?O?間隔層和ITO-Au背電極組成,當(dāng)對(duì)MOS電容器施加1 V或更高的電壓時(shí),ITO層發(fā)生電荷積聚,從而改變其有效折射率。ITO載流子濃度隨外加電壓的變化而變化,給定ITO層中的電荷濃度,可以計(jì)算出積聚層的厚度,從而預(yù)測(cè)器件的近場(chǎng)和遠(yuǎn)場(chǎng)特性。實(shí)驗(yàn)驗(yàn)證,通過(guò)施加2.5 V門(mén)偏壓,調(diào)制速度可高達(dá)10 MHz,產(chǎn)生184°的相移和約30% 的反射率變化,開(kāi)關(guān)功耗低至2.5 fJ。基于相移調(diào)控規(guī)律和低功耗的優(yōu)勢(shì),通過(guò)對(duì)多組不同周期的納米光柵結(jié)構(gòu)施加電門(mén)控,可以調(diào)整±1衍射階的偏轉(zhuǎn)角度,實(shí)現(xiàn)有效的不同角度掃描。如圖4(a)所示,針對(duì)2 ~ 4 μm的周期性納米天線,在僅施加3.0 V電壓的情況下獲得?40°~40°的掃描區(qū)域。Park等在前述工作的基礎(chǔ)上,建立MIM間隙等離子共振模型,分析欠耦合,臨界耦合和過(guò)耦合狀態(tài)下的反射場(chǎng),如圖4(b)所示,使?jié)M足180°相位偏移、低損耗的微納結(jié)構(gòu)設(shè)計(jì)更加高效,同時(shí)實(shí)現(xiàn)偏振照明的主動(dòng)可調(diào)。除了采用不同的納米天線材料和對(duì)應(yīng)優(yōu)化的結(jié)構(gòu)參數(shù),采用雙門(mén)控方法,也可以進(jìn)一步擴(kuò)大天線的調(diào)諧范圍。
Shirmanesh等提出了雙門(mén)控場(chǎng)效應(yīng)可調(diào)諧超構(gòu)表面天線陣列,如圖4(c)所示,該雙門(mén)控超構(gòu)表面結(jié)構(gòu)由鋁背反射器、柵極電介質(zhì)、ITO、柵極電介質(zhì)異質(zhì)結(jié)構(gòu)和具有“魚(yú)骨”圖案的周期性鋁納米天線陣列組成。該結(jié)構(gòu)提供了兩個(gè)門(mén),一個(gè)在頂部天線和ITO層之間,另一個(gè)在背板反射器與ITO層之間。雙門(mén)控超構(gòu)表面等價(jià)于兩個(gè)電壓獨(dú)立控制的串聯(lián)MOS 場(chǎng)效應(yīng)結(jié)構(gòu),因此與單門(mén)控超構(gòu)表面相比可以產(chǎn)生更寬的相位調(diào)諧范圍。介電層由氧化鋁/氧化鉿納米層結(jié)構(gòu)制成,具有高擊穿場(chǎng)和高介電常數(shù)的優(yōu)勢(shì)。頂部和底部的ITO/柵極-電介質(zhì)界面在施加的外部偏置電壓下表現(xiàn)出電荷積累或耗盡,從而促使ITO層的復(fù)折射率發(fā)生大幅變化。在工作波長(zhǎng)1550 nm下的實(shí)驗(yàn)表明,約6.5 V的電壓足以實(shí)現(xiàn)89%的反射率調(diào)制和約300°的相移,在偏轉(zhuǎn)角度和損耗方面具有良好的優(yōu)越性。Kim等使用基于雙門(mén)控等離子共振陣列結(jié)構(gòu)的主動(dòng)超構(gòu)表面,獨(dú)立控制反射振幅和相位,相位范圍可實(shí)現(xiàn)0°~360°的角度偏轉(zhuǎn),如圖4(d)所示,并首次成功實(shí)現(xiàn)10 m處的3D深度成像,掃描角度、角度步長(zhǎng)和空間點(diǎn)數(shù)分別為6°×4°,0.2°×0.2°和31×21=651個(gè)。隨后,三星公司的Park等在該研究工作的基礎(chǔ)上,使用相同結(jié)構(gòu)開(kāi)發(fā)空間光調(diào)制器實(shí)現(xiàn)光束掃描功能,如圖4(e)所示,以5.4 MHz的速度實(shí)現(xiàn)振幅獨(dú)立控制的360°空間連續(xù)掃描,在250 μm×250 μm的面積上集成550 個(gè)獨(dú)立可尋址的微納共振結(jié)構(gòu),并開(kāi)展工作距離4.7 m處的街道實(shí)景掃描實(shí)驗(yàn),其中車(chē)模型和人體圖的三維成像結(jié)果如圖4(e)所示。
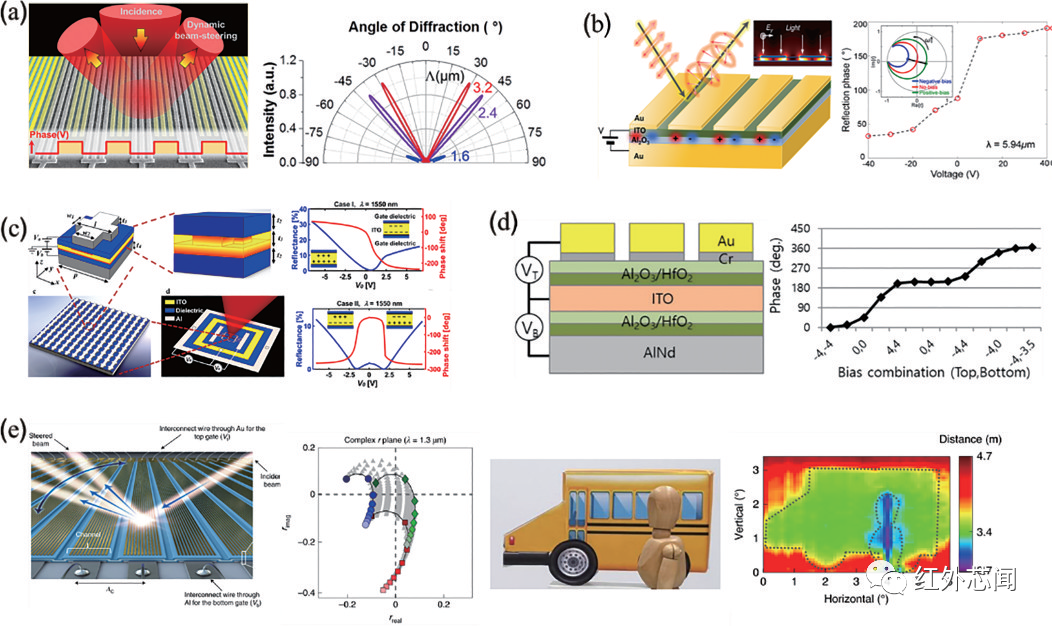
圖4 基于TCO材料的主動(dòng)可調(diào)超構(gòu)表面實(shí)現(xiàn)光束掃描
基于MQW半導(dǎo)體架構(gòu)的主動(dòng)可調(diào)超構(gòu)表面
MQW架構(gòu)廣泛應(yīng)用于各種高端光電器件,并有可能在可見(jiàn)光和較短的近紅外波段實(shí)現(xiàn)高達(dá)千兆赫茲速度的高速光電調(diào)制。目前基于MQW架構(gòu)的主動(dòng)可調(diào)超構(gòu)表面的物理機(jī)制是:通過(guò)對(duì)MQW施加電壓偏置,利用量子約束斯塔克效應(yīng)調(diào)制折射率,結(jié)合超構(gòu)表面的光場(chǎng)特性實(shí)現(xiàn)主動(dòng)可調(diào)。半導(dǎo)體超表面最顯著的優(yōu)勢(shì)是可以直接在III-V族晶圓上單片生長(zhǎng),同時(shí)與基于MQW架構(gòu)的LED、邊發(fā)射器和VCSEL等現(xiàn)有光源集成。
Wu等開(kāi)發(fā)了一種實(shí)現(xiàn)有源超構(gòu)表面的技術(shù),超構(gòu)表面的外延III-V異質(zhì)結(jié)構(gòu)由1.2 μm厚的未摻雜MQW層和具有分布式布拉格反射器結(jié)構(gòu)的GaAs襯底組成,如圖5(a)所示。MQW在915~920 nm附近的近帶隙區(qū)域中其可調(diào)折射率實(shí)部范圍在0.01~0.05內(nèi),通過(guò)將具有Mie諧振和導(dǎo)模諧振的混合超表面與可調(diào)諧MQW結(jié)構(gòu)結(jié)合,可以進(jìn)一步擴(kuò)大調(diào)制范圍。具體來(lái)說(shuō),部分蝕刻的雙縫MQW光柵結(jié)構(gòu)在916 nm和963 nm附近出現(xiàn)了反射率下降。這種混合諧振模式增強(qiáng)了917 nm附近的電光調(diào)制,并產(chǎn)生了約270%的反射率調(diào)制和70°的相移。利用MQW折射率實(shí)部的電光調(diào)制和可調(diào)光柵結(jié)構(gòu),將其應(yīng)用于光束轉(zhuǎn)向。實(shí)驗(yàn)證明使用約3 V的偏壓可實(shí)現(xiàn)全視場(chǎng)20°的光束掃描。在此研究工作的基礎(chǔ)上,Khaidarov等在混合金屬布拉格腔的GaP LED光源上集成超構(gòu)表面,如圖5(b)所示,布拉格腔用來(lái)減小光束的發(fā)散角,超構(gòu)表面通過(guò)光柵結(jié)構(gòu)調(diào)整光束偏折角度,從而實(shí)現(xiàn)了30°視場(chǎng)范圍的動(dòng)態(tài)光束掃描,但效率僅為3%。
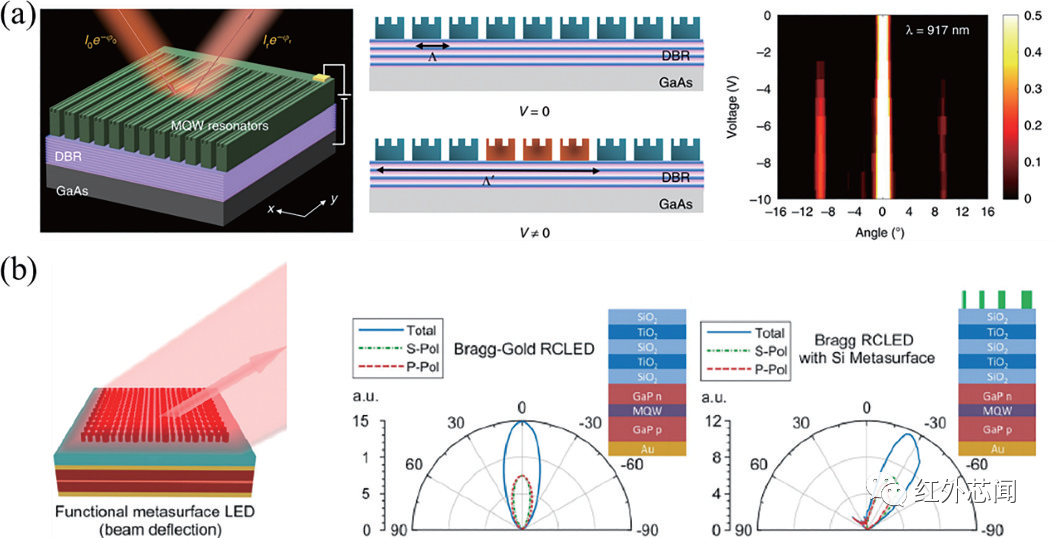
圖5 基于MQW架構(gòu)的介電主動(dòng)可調(diào)超表面
基于MEMS集成的主動(dòng)可調(diào)超構(gòu)表面
MEMS集成超構(gòu)表面一般通過(guò)MEMS實(shí)現(xiàn)動(dòng)態(tài)可調(diào),超構(gòu)表面以亞波長(zhǎng)優(yōu)勢(shì)實(shí)現(xiàn)光場(chǎng)調(diào)控。Holsteen等設(shè)計(jì)了一種驅(qū)動(dòng)懸浮硅超構(gòu)表面器件,能夠?qū)崿F(xiàn)瞬態(tài)顏色控制、動(dòng)態(tài)光束控制和光聚焦等多項(xiàng)功能,如圖6(a)所示,器件由SOI基底和硅超構(gòu)表面組成法珀共振模式,該器件的調(diào)制速度為1 MHz,偏置電壓為2~3 V,其中在2 V偏置電壓下覆蓋12°的掃描視場(chǎng)。除了上述將MEMS用作動(dòng)態(tài)控制超構(gòu)表面模式器件外,利用超構(gòu)表面的亞波長(zhǎng)調(diào)制特性,也可將其應(yīng)用于傳統(tǒng)光束掃描方案中替代已有光學(xué)器件。偏心微透鏡陣列(DMLA)是一種MEMS光束掃描方案,它作為機(jī)械和全固態(tài)方法的過(guò)渡技術(shù),具有速度快等優(yōu)勢(shì),但受限于傳統(tǒng)微透鏡的F數(shù)限制在角度分辨率性能上難以提升。Chen等提出使用超構(gòu)透鏡構(gòu)成兩組偏心透鏡陣列,開(kāi)發(fā)基于超構(gòu)表面透鏡陣列的半固體微機(jī)械光束掃描系統(tǒng)(MMLA)。兩組透鏡陣列構(gòu)成共焦系統(tǒng),前組透鏡相對(duì)于后組透鏡的微小橫向位移可實(shí)現(xiàn)出射光束的角度偏轉(zhuǎn)控制。因?yàn)槌瑯?gòu)透鏡陣列具有極小的F 數(shù),可獲得接近衍射極限的角度分辨能力。實(shí)驗(yàn)中實(shí)現(xiàn)了30°×30°的視場(chǎng)角和0.14°的角分辨率,可以清楚地識(shí)別三維物體,掃描速度可優(yōu)化至10 kHz左右,如圖6(b)所示。在大角度掃描方面,Martins等提出使用超構(gòu)凹透鏡擴(kuò)大出射角度的方法,結(jié)合具有MHz 掃描速度的聲光偏轉(zhuǎn)器(AOD)將入射光束定向至超構(gòu)透鏡的不同徑向位置處,從而實(shí)現(xiàn)大角度150°的動(dòng)態(tài)光束掃描,如圖6(c)所示,成功實(shí)現(xiàn)人體不同位姿的三維重建和識(shí)別。
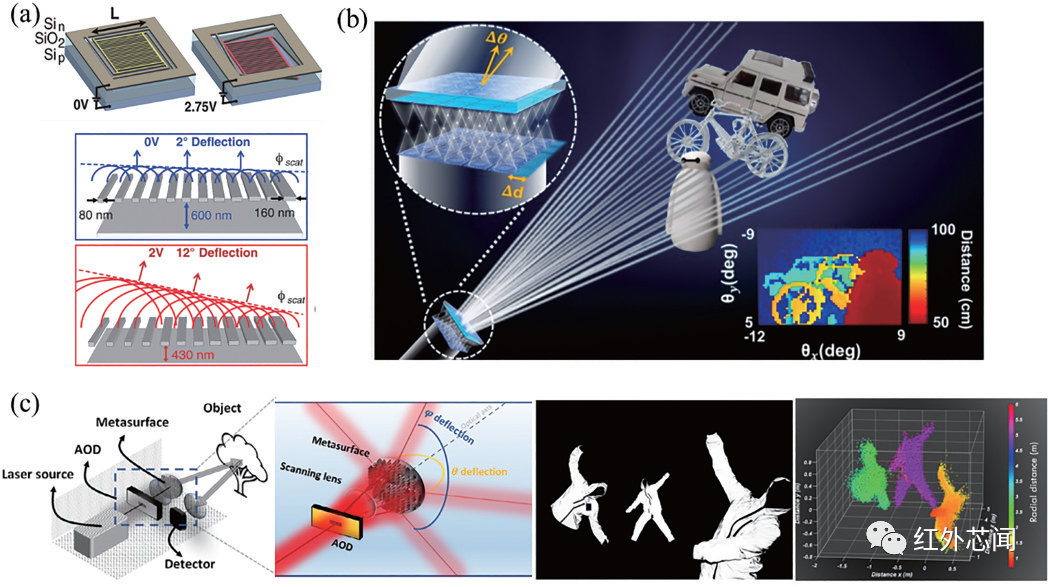
圖6 MEMS集成超構(gòu)表面實(shí)現(xiàn)光束掃描
基于液晶與相變材料的主動(dòng)可調(diào)超構(gòu)表面
液晶分子在外加電壓下能夠?qū)崿F(xiàn)動(dòng)態(tài)折射率控制,因此基于LC的空間光調(diào)制器(SLM)常用于激光雷達(dá)三維成像中。但LC層的厚度和小像素尺寸存在本質(zhì)約束,嚴(yán)重限制了小像素尺寸SLM的發(fā)展應(yīng)用。Li等提出集成TiO?超構(gòu)表面和LC,實(shí)現(xiàn)亞波長(zhǎng)像素尺寸的SLM,如圖7(a)所示。超構(gòu)表面結(jié)構(gòu)集成在液晶夾層中,根據(jù)液晶分子的取向0°、45°、90°實(shí)現(xiàn)三級(jí)相位延遲,通過(guò)施加0、3.5、8 V的偏置電壓實(shí)現(xiàn)角度11°的偏轉(zhuǎn),但液晶集成超構(gòu)表面的結(jié)構(gòu)調(diào)制速度只有kHz,切換時(shí)間為ms級(jí)。除此之外,相變材料是一種制備有源可調(diào)超構(gòu)表面的材料,通常在外部熱、光和電的激勵(lì)下,在非晶態(tài)和晶態(tài)之間快速和重復(fù)切換,如圖7(b)所示。Yin等提出一種基于相變材料高度集成的等離子體有源超構(gòu)表面實(shí)現(xiàn)光束轉(zhuǎn)向。有源超構(gòu)表面由50 nm厚的相變材料有源層(Ge?Sb?Te?)、15 nm厚的防氧化層和40 nm厚的Au天線組成,當(dāng)溫度加熱到160°時(shí)切換至非晶態(tài)。該結(jié)構(gòu)有兩組不同等離子共振的納米天線,在非晶態(tài)和晶態(tài)下分別具有不同的共振模式,從而改變衍射光束的衍射角,實(shí)現(xiàn)光束偏折可調(diào)功能。
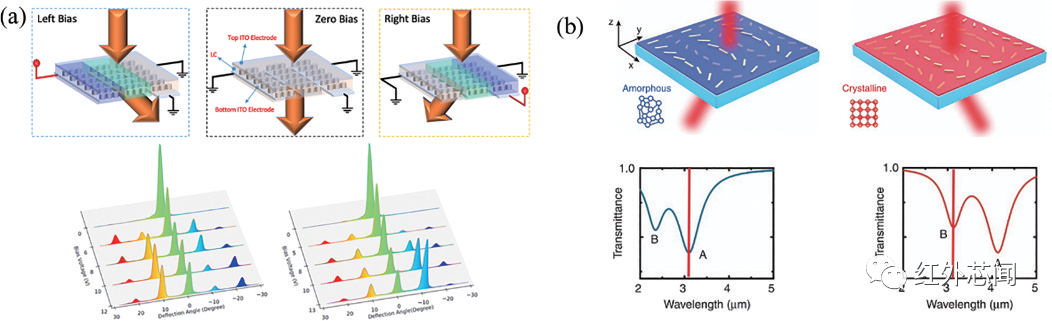
圖7 (a)基于液晶的主動(dòng)可調(diào)超構(gòu)表面;(b)基于相變材料的有源超構(gòu)表面
以上幾種調(diào)控方式實(shí)現(xiàn)的動(dòng)態(tài)可調(diào)諧超構(gòu)表面光束掃描方案,具有不同的特性。TCO適用于近紅外和中紅外波段,調(diào)制速度達(dá)到幾十MHz,其中雙門(mén)控結(jié)構(gòu)具有高載流子密度,成像視場(chǎng)可達(dá)到180°,相較于結(jié)構(gòu)光技術(shù),其點(diǎn)云密度較少,但計(jì)算速度快,因此在自動(dòng)駕駛等領(lǐng)域擁有巨大的應(yīng)用潛力。MQW適用于可見(jiàn)光和近紅外波段,調(diào)制速度比TCO 更快,最快能夠達(dá)到幾千MHz,并且和光源直接集成,有望實(shí)現(xiàn)平面化高集成度光電器件,但MQW目前效率較低,且基于可調(diào)光柵結(jié)構(gòu)導(dǎo)致掃描角度有限,后續(xù)有望采用陣列電控模式拓寬其掃描角度。MEMS系統(tǒng)通過(guò)形變實(shí)現(xiàn)連續(xù)的光束掃描,但調(diào)諧范圍有限,只有±12°的成像視場(chǎng),基于透鏡相位組合的MEMS超構(gòu)表面器件擴(kuò)大了成像視場(chǎng),相較于傳統(tǒng)MEMS器件在成像視場(chǎng)和空間分辨率上有極大的優(yōu)勢(shì),但是離散元件結(jié)構(gòu)同樣會(huì)面臨機(jī)械結(jié)構(gòu)慣性引入的技術(shù)問(wèn)題。基于液晶的主動(dòng)可調(diào)超構(gòu)表面可以在太赫茲到可見(jiàn)光的寬波段內(nèi)工作,切換時(shí)間為ms級(jí),速度較慢,相變材料GST通過(guò)改變溫度可在非晶相和晶相之間實(shí)現(xiàn)ns級(jí)切換,其高折射率可應(yīng)用于紅外波段,且在實(shí)際工程應(yīng)用中快速溫控調(diào)節(jié)會(huì)使整機(jī)體積變大,離真正的集成器件仍有一定的距離。
光場(chǎng)技術(shù)
光場(chǎng)成像的理論背景源自全光函數(shù),全光函數(shù)是對(duì)空間中光分布的非物理、無(wú)模型、純現(xiàn)象學(xué)的描述。為了在不參考底層成像機(jī)制的情況下適應(yīng)于光的所有可能變化,全光函數(shù)采用高維函數(shù)L(x,y,z,θ,φ,λ,t)描述任意空間位置(x,y,z)、任意入射角度(θ,φ)、任意波長(zhǎng)λ、任意時(shí)刻t的亮度值。考慮到實(shí)際成像裝置是宏觀的,同時(shí)假設(shè)測(cè)量函數(shù)是帶限的,我們可以使用四維(4D)函數(shù)(u,v,s,t)描述光場(chǎng),對(duì)應(yīng)于物理空間中的一條光線,該函數(shù)也被稱(chēng)為相空間函數(shù)。傳統(tǒng)的光場(chǎng)成像通常使用小孔陣列、微透鏡陣列和編碼孔徑陣列等對(duì)光場(chǎng)函數(shù)進(jìn)行采樣,結(jié)合后期計(jì)算機(jī)視覺(jué)算法獲取光場(chǎng)信息,將投影移動(dòng)到不同的焦距,這使用戶能夠在采集后自由地重新聚焦圖像從而得到真實(shí)場(chǎng)景的三維信息,已逐漸應(yīng)用于工業(yè)、虛擬現(xiàn)實(shí)、生命科學(xué)和三維流動(dòng)測(cè)試等領(lǐng)域。其中微透鏡陣列相對(duì)于針孔陣列具有更高的能量利用率和信噪比,相對(duì)于編碼孔徑陣列更易于制造,因此被廣泛應(yīng)用于光場(chǎng)相機(jī)中。光場(chǎng)相機(jī)的性能分為空間和深度兩部分,其中空間分辨率和深度分辨率取決于相機(jī)傳感器的像素?cái)?shù),是一對(duì)相互約束的性能指標(biāo),同時(shí)光場(chǎng)相機(jī)要求具有更寬的視場(chǎng)和更大的景深。隨著相機(jī)傳感器像素的尺寸越來(lái)越小,尺寸更小的微透鏡陣列設(shè)計(jì)和加工制造同樣面臨著挑戰(zhàn)。基于超構(gòu)表面的超透鏡研究目前已趨于成熟,在消球差消色差等方面有顯著進(jìn)步,由于傳統(tǒng)折射球面透鏡很難通過(guò)一片式透鏡實(shí)現(xiàn)消色差和球差,超透鏡陣列的引入為光場(chǎng)成像的性能提升帶來(lái)新的希望。
2019年,Holsteen等提出多功能光場(chǎng)超構(gòu)表面實(shí)現(xiàn)高分辨率的三維單粒子追蹤。超構(gòu)表面陣列采用共孔徑相互交疊的三個(gè)透鏡相位,如圖8(a)所示,共孔徑透鏡相位相比相同口徑內(nèi)分離的三個(gè)透鏡相位具有較大的NA,從而實(shí)現(xiàn)衍射受限的橫向分辨能力,結(jié)合三個(gè)透鏡陣列組成的光場(chǎng)模式,在0.5 mm×0.5 mm×0.3 mm測(cè)量體積內(nèi)進(jìn)行多個(gè)熒光粒子的同時(shí)跟蹤,且具有亞微米水平和微米水平軸向分辨率。該方法基于超構(gòu)表面的相位復(fù)用技術(shù)實(shí)現(xiàn)多功能透鏡陣列,解決了三維單粒子追蹤橫向分辨率不足的問(wèn)題,且超構(gòu)表面的小型化和平面化使其可以適配未經(jīng)改裝的顯微鏡,相對(duì)傳統(tǒng)光學(xué)元件具有廣闊的應(yīng)用前景。針對(duì)傳統(tǒng)單片透鏡難以實(shí)現(xiàn)消色差的問(wèn)題,Lin等通過(guò)納米柱和納米孔的結(jié)構(gòu)參數(shù)設(shè)計(jì)滿足群延遲和群延遲色散的補(bǔ)償,實(shí)現(xiàn)單個(gè)超透鏡消色差功能,將60×60的消色差超透鏡陣列應(yīng)用于光場(chǎng)相機(jī)中,獲得不同焦深的動(dòng)態(tài)實(shí)時(shí)全彩成像,如圖8(b)所示。
2020年,Kwon等通過(guò)偏振復(fù)用和空間復(fù)用的方法充分利用超構(gòu)表面的緊湊性和多功能性,設(shè)計(jì)雙層超構(gòu)表面(垂直級(jí)聯(lián))組成的小型化定量相位梯度顯微鏡,如圖8(c)所示,第一層超表面形成剪切的兩幅正交偏振態(tài)圖像,經(jīng)過(guò)第二層的三個(gè)離軸超透鏡后分別疊加上不同的相位,最終在像面上得到三幅干涉圖,結(jié)合三步相移算法和差分干涉對(duì)比提取定量的相位梯度信息,獲得了亞微米尺度的軸向分辨率。超透鏡陣列不僅可以同時(shí)獲得待測(cè)物體的位置信息和角度信息,在不同視差情況下的像差表現(xiàn)也具有差異性,基于超透鏡陣列的成像像差特性,Liu等提出使用超透鏡陣列實(shí)現(xiàn)像差校正的三維定位技術(shù),如圖8(d)所示,該方法利用3個(gè)超構(gòu)透鏡形成的有視差的3幅圖像,設(shè)計(jì)基于互相關(guān)的梯度下降算法對(duì)圖像進(jìn)行單色像差校正以提高成像質(zhì)量,利用校正后的圖像計(jì)算視差值得到其深度信息,實(shí)現(xiàn)亞微米級(jí)別的三維定位。
2022年,在前述超透鏡陣列光場(chǎng)相機(jī)的研究基礎(chǔ)上,F(xiàn)an等提出基于偏振復(fù)用的雙焦超透鏡陣列用于擴(kuò)展景深的光場(chǎng)成像,如圖8(e)所示,該技術(shù)通過(guò)對(duì)場(chǎng)景中的自然光進(jìn)行正交偏振態(tài)的不同光場(chǎng)調(diào)制,在拍攝場(chǎng)景的近端和遠(yuǎn)端均可自發(fā)實(shí)現(xiàn)光場(chǎng)信息的獲取。雙焦超透鏡引入的像差可構(gòu)建為調(diào)制矩陣,由后期的深度學(xué)習(xí)算法去除像差后結(jié)合傳統(tǒng)的基于視差幾何的光場(chǎng)恢復(fù)算法,實(shí)現(xiàn)3 cm~1.7 km的超大景深光場(chǎng)成像。為了解決光場(chǎng)成像被動(dòng)成像對(duì)暗光等環(huán)境適應(yīng)性差的問(wèn)題,Chen等提出集成結(jié)構(gòu)光技術(shù)和光場(chǎng)技術(shù)的超透鏡陣列設(shè)備實(shí)現(xiàn)復(fù)雜環(huán)境的深度感知,如圖8(f)所示,該方法利用超透鏡陣列的逆向光路,由激光光源和探測(cè)器組成共軛光路,當(dāng)環(huán)境變暗時(shí),打開(kāi)激光光源經(jīng)過(guò)超透鏡陣列投射陣列光點(diǎn)形成結(jié)構(gòu)光投影,結(jié)合三角測(cè)量原理恢復(fù)300 mm測(cè)量范圍的深度信息。
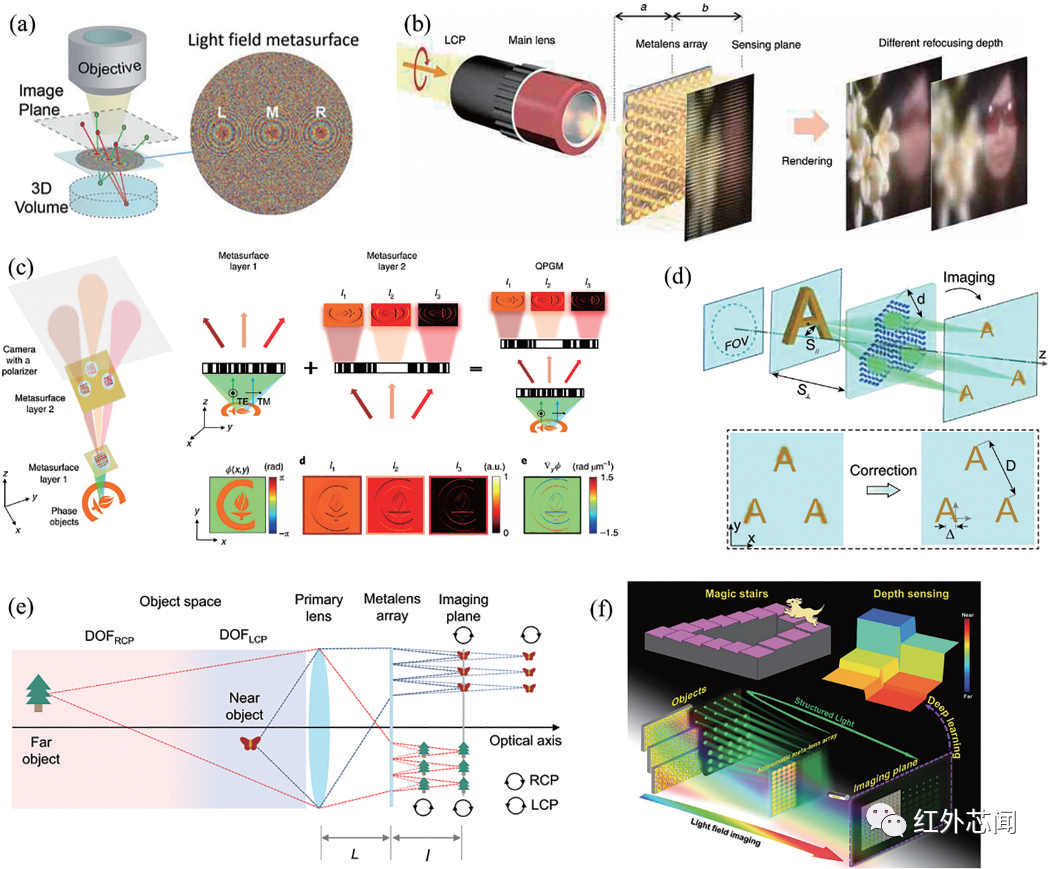
圖8 基于超構(gòu)透鏡陣列的光場(chǎng)三維成像技術(shù)
基于超構(gòu)表面的光場(chǎng)技術(shù)本質(zhì)是利用尺寸小、無(wú)球差可復(fù)用的超透鏡陣列替代傳統(tǒng)微透鏡陣列實(shí)現(xiàn)更高分辨率、更大工作范圍的三維成像技術(shù),因此可根據(jù)不同距離處不同視場(chǎng)大小的測(cè)量場(chǎng)景選擇主鏡配合超透鏡陣列實(shí)現(xiàn)三維成像,在顯微成像、自動(dòng)駕駛、人臉識(shí)別等領(lǐng)域均具有廣闊的應(yīng)用前景。在空間分辨率和深度分辨率方面,超透鏡陣列可通過(guò)設(shè)計(jì)實(shí)現(xiàn)對(duì)應(yīng)測(cè)量場(chǎng)景的折中,隨著未來(lái)探測(cè)器的像素尺寸越來(lái)越小,像素?cái)?shù)越來(lái)越大,超透鏡陣列的光場(chǎng)成像技術(shù)方案將發(fā)揮不可替代的作用,致力于新一代光場(chǎng)成像應(yīng)用。
點(diǎn)擴(kuò)散函數(shù)工程技術(shù)
線性不變光學(xué)系統(tǒng)可以通過(guò)PSF來(lái)完全表征。通過(guò)設(shè)計(jì)具有特定性能的PSF可以得到具有所需性能的成像系統(tǒng)。例如,具有拋物形相位剖面加上立方相位項(xiàng)的擴(kuò)展焦深超構(gòu)表面,在整個(gè)可見(jiàn)光區(qū)域具有不變的PSF,可以使用白光進(jìn)行聚焦,全可見(jiàn)光譜直接成像。因此,基于PSF工程的三維成像技術(shù)需要設(shè)計(jì)一個(gè)隨深度變化的PSF,其中雙螺旋PSF(DH-PSF)隨著待成像物體沿軸移動(dòng)而旋轉(zhuǎn),可以唯一地編碼物體距離,常被應(yīng)用于快照式深度信息獲取中。除此之外,離焦恢復(fù)深度技術(shù)本質(zhì)上是使用隨深度變化的離焦函數(shù)作為系統(tǒng)的三維PSF,結(jié)合計(jì)算機(jī)視覺(jué)算法恢復(fù)深度信息。超構(gòu)表面具有多功能性和多物理量調(diào)控的特征,在基于PSF工程的三維成像技術(shù)中得到初步應(yīng)用,促進(jìn)該技術(shù)在小型化、大景深、多物理量獲取等方面的發(fā)展。
2019年,Guo等提出基于共孔徑雙焦超透鏡的離焦深度恢復(fù)方法,在單個(gè)探測(cè)器的不同區(qū)域上同時(shí)形成2幅不同的離焦圖像,實(shí)現(xiàn)快照式被動(dòng)三維成像,如圖9(a)所示。口徑為3 mm的超透鏡實(shí)現(xiàn)在10 cm深度測(cè)量范圍內(nèi)測(cè)量誤差低于5%(置信度為0.5),經(jīng)預(yù)校準(zhǔn)后的深度恢復(fù)算法使用少于700個(gè)的浮點(diǎn)運(yùn)算,可實(shí)現(xiàn)實(shí)時(shí)深度計(jì)算。由于超構(gòu)表面的高頻相位不連續(xù),因此超構(gòu)透鏡具備比衍射元件更大的色散。色散在傳統(tǒng)成像設(shè)計(jì)中會(huì)影響成像質(zhì)量難以消除,但在計(jì)算成像體系中,色散設(shè)計(jì)引入了波長(zhǎng)編碼PSF的另一個(gè)物理維度。2021年,Tan等提出基于超透鏡極端色散實(shí)現(xiàn)三維彩色圖像重建,如圖9(b)所示。超透鏡R、G、B三個(gè)通道具有不同的深度依賴PSF,利用兩個(gè)卷積神經(jīng)網(wǎng)絡(luò)U-Net恢復(fù)出深度圖和RGB紋理信息,數(shù)值模擬展示了口徑1 mm的超透鏡能夠?qū)崿F(xiàn)0.12~0.6 m的深度信息和彩色紋理信息重建。DH-PSF是常用的深度依賴PSF工程技術(shù),Jin等提出DH-PSF和透鏡相位疊加的緊湊型深度定位系統(tǒng),如圖9(c)所示,該技術(shù)使用等離子超構(gòu)表面實(shí)現(xiàn)相位疊加功能,相對(duì)于傳統(tǒng)光學(xué)系統(tǒng)減小了元件個(gè)數(shù)和體積,充分利用超構(gòu)表面的多功能性實(shí)現(xiàn)儀器的小型化,該項(xiàng)研究工作證明了軸上單個(gè)物點(diǎn)和軸外雙物點(diǎn)的旋轉(zhuǎn)角度和深度的線性關(guān)系,在可見(jiàn)光和多種入射偏振狀態(tài)下實(shí)現(xiàn)73.9%的效率。基于該項(xiàng)研究工作,Jin等提出使用介質(zhì)超表面實(shí)現(xiàn)上述功能,并通過(guò)計(jì)算相機(jī)測(cè)量圖像的功率譜,生成具有深度信息的場(chǎng)景圖像,如圖9(d)所示。為擴(kuò)大DH-PSF技術(shù)的成像景深,Colburn等提出三次方相位和DH-PSF相位以超構(gòu)表面空間復(fù)用的方式物理實(shí)現(xiàn),如圖9(e)所示,能在可見(jiàn)光波段對(duì)場(chǎng)景中的深度信息編碼為兩個(gè)互補(bǔ)的PSF,通過(guò)三次方相位擴(kuò)展景深,對(duì)捕獲數(shù)據(jù)進(jìn)行反卷積處理恢復(fù)其二維強(qiáng)度圖和深度圖,測(cè)距誤差為1.7%。結(jié)合超透鏡的強(qiáng)大橫向色散能力和光場(chǎng)技術(shù),Hua等提出超緊湊快照式光譜光場(chǎng)成像技術(shù),如圖9(f)所示,該技術(shù)通過(guò)光場(chǎng)和色散聯(lián)合編碼不同深度和波長(zhǎng)通道的PSF,構(gòu)建正向成像模型并設(shè)計(jì)相應(yīng)的凸優(yōu)化算法,以48 × 48個(gè)口徑30 μm的超透鏡陣列實(shí)現(xiàn)4 nm的光譜分辨能力和30 cm范圍的深度成像。
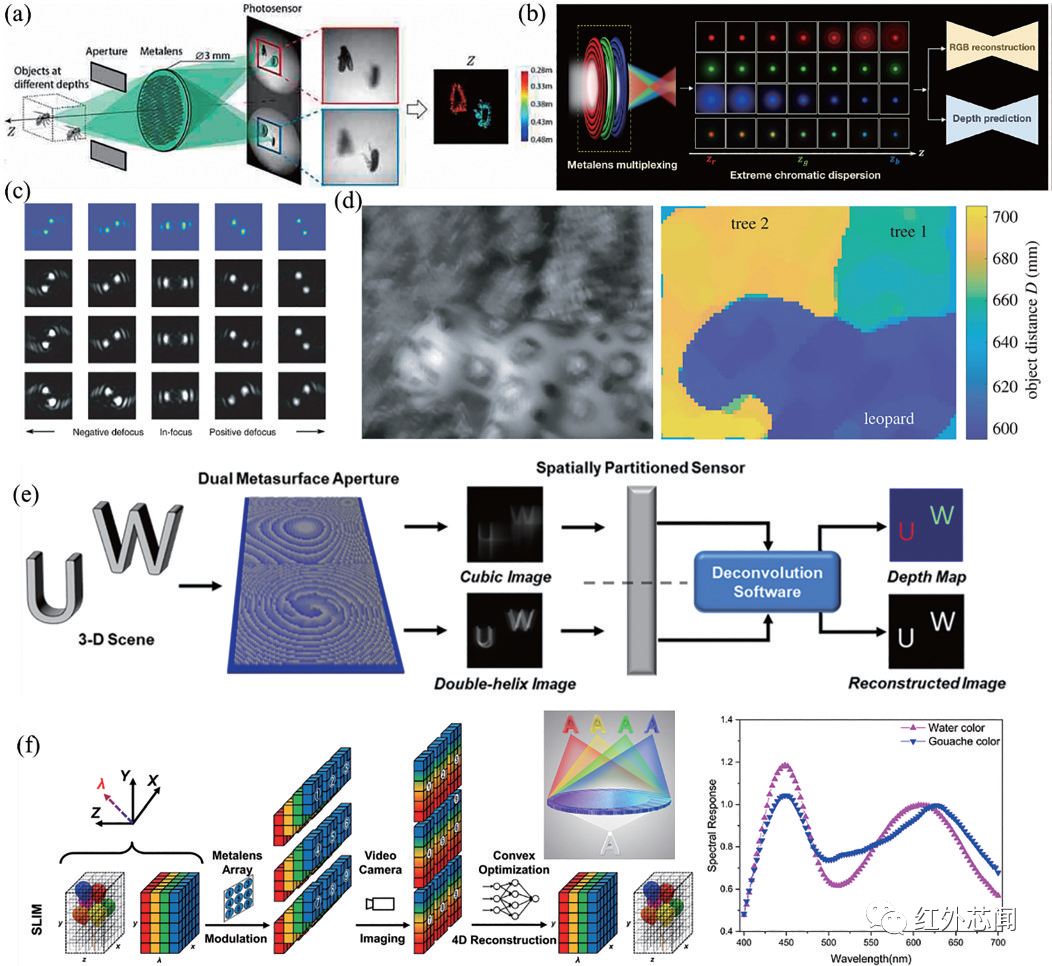
圖9 基于超構(gòu)表面的PSF工程技術(shù)用于三維成像
由于超構(gòu)表面的多物理量調(diào)控特性,基于超構(gòu)表面的PSF工程技術(shù)拓寬了傳統(tǒng)PSF工程技術(shù)的成像維度。超構(gòu)表面打破了原有相位調(diào)控的單一維度,利用偏振、光譜等維度實(shí)現(xiàn)多功能選通、調(diào)控物理量獲取等功能。該技術(shù)在不配合主鏡的情況下受限于超透鏡的設(shè)計(jì)瓶頸,只能在較小范圍內(nèi)(實(shí)驗(yàn)中大致為mm)實(shí)現(xiàn)三維成像,配合主鏡,可實(shí)現(xiàn)成像范圍自由配置,能夠?qū)崿F(xiàn)對(duì)傳統(tǒng)相位元件的完全替代和超越,廣泛應(yīng)用于具有豐富紋理的測(cè)量場(chǎng)景中。
結(jié)束語(yǔ)
三維成像技術(shù)中超構(gòu)表面的共性限制
超構(gòu)表面采用平面加工技術(shù),有效地融合了光學(xué)和芯片制造技術(shù),為工業(yè)應(yīng)用提供了巨大的優(yōu)勢(shì)。相比之下,體三維材料的納米結(jié)構(gòu)仍然是一個(gè)相當(dāng)大的挑戰(zhàn)。盡管3D激光直寫(xiě)等技術(shù)正越來(lái)越接近100 nm以下的分辨率,但在可見(jiàn)光和近紅外環(huán)境下工作的體積超材料仍然遙不可及。因此平面超表面主導(dǎo)著研究和應(yīng)用,但平面化超構(gòu)元件在三維成像技術(shù)中的工程應(yīng)用依然存在著挑戰(zhàn)。實(shí)驗(yàn)室用于超構(gòu)表面制造的許多材料與半導(dǎo)體制造代工廠的行業(yè)標(biāo)準(zhǔn)不兼容。因此,將技術(shù)轉(zhuǎn)化為可擴(kuò)展的制造和行業(yè)標(biāo)準(zhǔn)通常具有挑戰(zhàn)性。例如,金和銀等普通等離子體金屬與CMOS制造不兼容。介電超表面(通常由硅制成)彌補(bǔ)了這一差距,然而,傳統(tǒng)的CMOS芯片制造使用絕緣體上的硅晶圓,但光學(xué)超表面需要透明襯底上的硅。最近,Metalenz與意法半導(dǎo)體合作使用極紫外光刻技術(shù)。然而,這種制造技術(shù)在a- Si層沉積的可重復(fù)性、對(duì)環(huán)境變化的魯棒性,以及使用玻璃晶圓時(shí)的工藝方面仍然存在挑戰(zhàn)。另外在可見(jiàn)光和紫外光譜范圍內(nèi)實(shí)現(xiàn)其他材料的操作將進(jìn)一步挑戰(zhàn)制造工藝。
三維技術(shù)目前大多數(shù)應(yīng)用于可見(jiàn)光和紅外波段,在相應(yīng)波段的微納結(jié)構(gòu)設(shè)計(jì)和先進(jìn)材料等方面也不斷取得進(jìn)步。在設(shè)計(jì)方面,超構(gòu)表面近年來(lái)取得了巨大的進(jìn)步,最初的納米圓柱體微納結(jié)構(gòu)已經(jīng)被高性能的逆向設(shè)計(jì)結(jié)構(gòu)所取代。隨著微納光學(xué)應(yīng)用的擴(kuò)展,學(xué)界正在積極探索不同高折射率介電材料的制備。電介質(zhì)材料如TiO?、GaN、SiN和SiC等已經(jīng)得到研究證明。
最后,可以取代現(xiàn)有光學(xué)元件的大面積超構(gòu)表面的制造并非沒(méi)有挑戰(zhàn)。大多數(shù)實(shí)驗(yàn)室使用的電子束光刻工具不能大面積制模,深紫外光光刻需要先進(jìn)的掩模。基于超構(gòu)表面的結(jié)構(gòu)光技術(shù)和TOF技術(shù)中均存在零級(jí)效應(yīng),實(shí)驗(yàn)效率低于理論效率,這是加工不完善導(dǎo)致的,因此先進(jìn)材料、復(fù)雜結(jié)構(gòu)、大口徑、高精度的超構(gòu)表面加工技術(shù)面臨的挑戰(zhàn)急需解決。
超構(gòu)表面在三維成像應(yīng)用中的性能瓶頸
在基于超構(gòu)表面的結(jié)構(gòu)光三維成像技術(shù)中,受限于超構(gòu)表面的微納加工工藝,現(xiàn)有基于超構(gòu)表面的投影器件具有很大的零級(jí)效應(yīng),造成能量損耗,不利于人眼安全,為了超構(gòu)表面投影器件能夠快速走向?qū)嶋H應(yīng)用,這些都是迫切需要解決的問(wèn)題。另外,超構(gòu)表面的引入并沒(méi)有打破基線約束,結(jié)構(gòu)光模塊的整體體積還有待壓縮,深度方向依賴的編碼投影器件有助于打破基線,使整體系統(tǒng)小型化、平面化和高度集成。
TOF技術(shù)中:基于TCO的三維成像技術(shù)瓶頸在于角度掃描個(gè)數(shù)較低,需要設(shè)計(jì)自由度更高的超構(gòu)表面實(shí)現(xiàn)更多的相位模式調(diào)制;基于MQW的三維成像技術(shù)走向應(yīng)用需要解決大陣列單獨(dú)電控元件的加工問(wèn)題;基于MEMS超構(gòu)表面的三維成像技術(shù)需要解決MEMS和超構(gòu)表面元件分離帶來(lái)的機(jī)械慣性問(wèn)題,需從加工方面解決集成問(wèn)題;基于液晶和相變材料的三維成像技術(shù)需要解決幀速的問(wèn)題。
光場(chǎng)技術(shù)中,超構(gòu)表面作為超透鏡陣列展現(xiàn)出優(yōu)于微透鏡陣列的良好性能,在大視場(chǎng)消色差方面仍表現(xiàn)不足,目前在算法上可使用標(biāo)定解決此問(wèn)題,但通過(guò)逆設(shè)計(jì)選擇合適的結(jié)構(gòu)實(shí)現(xiàn)大視場(chǎng)消色差超透鏡陣列,將實(shí)現(xiàn)超構(gòu)表面光場(chǎng)技術(shù)在三維成像精度上的大幅提升。
PSF工程技術(shù)中,超構(gòu)表面作為相位編碼元件和透鏡元件的多功能復(fù)合元件,展現(xiàn)了其集成系統(tǒng)的優(yōu)秀能力。但是超構(gòu)表面仍然面臨著口徑小導(dǎo)致的工作距離短等問(wèn)題,在大的成像范圍內(nèi)需解決超構(gòu)表面口徑的加工和設(shè)計(jì)問(wèn)題,大口徑加工屬于上述討論的共性限制,設(shè)計(jì)層面來(lái)講,和超透鏡陣列類(lèi)似,超構(gòu)表面需解決大視場(chǎng)消色差(非光譜調(diào)制的系統(tǒng))設(shè)計(jì)的基礎(chǔ)問(wèn)題。
基于超構(gòu)表面的新型三維成像技術(shù)挑戰(zhàn)
目前基于超構(gòu)表面的三維成像技術(shù)大多依賴于超構(gòu)器件的小型化和多功能性,成像原理依然停留在傳統(tǒng)成像的物理機(jī)制中。傳統(tǒng)的三維成像系統(tǒng)如結(jié)構(gòu)光和TOF技術(shù),空間分辨率取決于點(diǎn)云投射數(shù)量和點(diǎn)云最小尺寸,這些基本的性能限制由于超構(gòu)元件的引入而有所提升。針對(duì)微透鏡陣列的光場(chǎng)技術(shù)而言,像差的基本限制來(lái)源于Snell定律,超透鏡的引入可以有效去除球差和部分色差。但是超構(gòu)表面的物理機(jī)制例如超材料的耦合、共振和非線性效應(yīng)能否打破現(xiàn)有成像機(jī)制帶來(lái)的性能瓶頸,是一個(gè)值得研究的課題。
超構(gòu)表面具有豐富的光場(chǎng)調(diào)控自由度,但目前應(yīng)用于三維成像技術(shù)大多是基于相位、偏振、色散調(diào)控,每個(gè)額外的信息通道都賦予了超構(gòu)表面從高維數(shù)據(jù)編碼的機(jī)會(huì),因此其他通道例如角動(dòng)量或者角度敏感性等方面存在相當(dāng)大的潛力。
對(duì)于應(yīng)用于工業(yè)4.0、自動(dòng)駕駛等領(lǐng)域的新型三維技術(shù)需要適應(yīng)復(fù)雜的環(huán)境例如強(qiáng)光干擾、厚云霧等情境,對(duì)于應(yīng)用于航天觀測(cè)的三維技術(shù)要求系統(tǒng)穩(wěn)定來(lái)解決湍流擾動(dòng)等工程難題,除此之外還有水下成像等。因此開(kāi)展超構(gòu)表面的復(fù)雜環(huán)境中的成像穩(wěn)定性研究,能夠提高超構(gòu)表面相對(duì)于其他傳統(tǒng)元件的核心競(jìng)爭(zhēng)優(yōu)勢(shì)。
這項(xiàng)研究獲得國(guó)家自然科學(xué)基金(62105024)和中國(guó)博士后科學(xué)基金(2021M690389)的資助和支持。
審核編輯:劉清
-
編碼器
+關(guān)注
關(guān)注
45文章
3649瀏覽量
134745 -
探測(cè)器
+關(guān)注
關(guān)注
14文章
2648瀏覽量
73083 -
MEMS技術(shù)
+關(guān)注
關(guān)注
0文章
142瀏覽量
21160 -
三維成像
+關(guān)注
關(guān)注
0文章
35瀏覽量
11114 -
tof傳感器
+關(guān)注
關(guān)注
2文章
106瀏覽量
14791
原文標(biāo)題:綜述:基于超構(gòu)表面的三維成像技術(shù)
文章出處:【微信號(hào):MEMSensor,微信公眾號(hào):MEMS】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
三維測(cè)量在醫(yī)療領(lǐng)域的應(yīng)用
常見(jiàn)的三維測(cè)量方法和工具
三維測(cè)量技術(shù)在工業(yè)中的應(yīng)用
三維掃描與建模的區(qū)別 三維掃描在工業(yè)中的應(yīng)用
三維電子背散射衍射(EBSD)技術(shù):FIB-SEM與EBSD的結(jié)合應(yīng)用案例
中國(guó)研發(fā)出新型三維電壓成像新技術(shù)
三維打印技術(shù)原理
泰來(lái)三維 工廠三維掃描建模技術(shù)服務(wù)

探討三種超構(gòu)器件表面的加工方法

基于三維超球面的聲學(xué)復(fù)眼裝置,可用于全向?qū)拵盘?hào)增強(qiáng)

泰來(lái)三維|文物三維掃描,文物三維模型怎樣制作

基于超構(gòu)表面的拉普拉斯光學(xué)微分處理器可用于光學(xué)成像
超構(gòu)表面在微測(cè)輻射熱計(jì)中的應(yīng)用綜述

COMSOL Multiphysics在超材料與超表面仿真中的應(yīng)用
顯微測(cè)量|共聚焦顯微鏡大傾角超清納米三維顯微成像





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論