 PID中比例控制和積分控制的作用 PID的參數整定過程
PID中比例控制和積分控制的作用 PID的參數整定過程
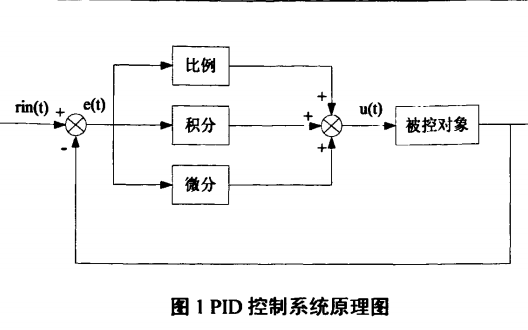
前面的文章已經針對PID進行過分析:PID是比例、積分、微分的三種控制方式組合成的控制算法的稱謂。
在使用PID算法進行控制的時候,難點往往都不是怎么樣去用代碼實現,而是PID控制器的參數整定。PID參數整定是非常關鍵的,這些參數的設置影響了PID控制算法的快速性、穩定性。所以正確地理解PID各參數的實際物理意義,對PID控制來說是非常重要的。
對PID的理解還是與鍋爐加熱系統的溫度控制來加以說明。對鍋爐而言,我們不考慮其他的控制功能和附加因素,就以控制溫度穩定在我們期望值而言對PID控制算法進行剖析。
1、 比例控制起什么作用?
假設鍋爐系統啟動的時候,距離我們期望的溫度500℃是有很大的差距的,這個時候就通過比例控制的方式加大調節力度,讓溫度快速變化到期望的溫度。
這個時候的比例系數的選取就非常的重要:
比例系數如果太小,調節的力度不夠,使系統輸出量(溫度值)變化緩慢,調節所需的總時間過長。
增大比例系數:可以使系統反應靈敏,調節速度加快,還可以減小穩態誤差。但比例系數如果過大,調節力度太強,容易造成調節過頭,嚴重的甚至使溫度忽高忽低,來回震蕩,超調量也會增大,這不是我們希望看到的。
所以,單純的比例控制很難讓確保調節的穩定,也難以做到完全消除誤差。
2、積分控制起什么作用?
在控制系統中,輸出量與設定值兩者的差值就是控制的偏差,有偏差就說明輸出量并未穩定在期望值上,需要繼續調節。
以鍋爐溫度的調節來說,假如溫度的調節是通過調節電位器實現的,積分控制就相等于是根據誤差值去改變電位器的角度。如果輸出的溫度低于設定值,那偏差就為正,積分項是增大的,這個時候就要增大電位器的角度,使電流變大,溫度升高。反之,如果輸出的溫度高于設定值,那偏差就為負,積分項是減小的,這個時候就要減小電位器的角度,使電流變小,溫度降低。
總而言之,PID控制中,積分作用就是對偏差的累積,用于消除靜差。積分累積效果可以參見下圖。
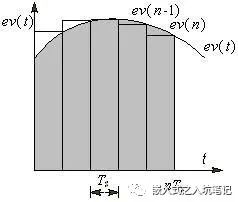
但是積分作用它本身是有滯后的特性的。如果積分作用太強的話,相當于電位器的角度扭的太大了,超調容易增大;而積分作用太弱的話,消除靜差的速度又很緩慢,對控制效果不夠明顯。
所以,積分的比例系數要選擇合適,才能達到比較好的調節效果。
3、微分控制起什么作用?
在PID中,微分就是反映偏差的變化速率的。系統的偏差變化越快,那微分的絕對值就越大,反之絕對值越小。
當系統的偏差增大時,微分為正,偏差減小時,微分為負。系統的輸出量的微分部分與偏差的微分成正比,是可以反映被控量的變化趨勢的。
4、采樣周期
PID控制算法中,一個很重要的時間參數 — 采樣周期。
這個采樣周期怎么理解呢?簡單而言,PID控制算法是按照一定的周期執行的,那這個執行的周期就稱為采樣周期。
一般而言,采樣周期越小,PID算法調控作用就越頻繁,控制效果就會越迅速。反之,采樣周期越大,PID調控作用就越滯后,控制效果就會變差。
那這么說的話,是不是只要采樣周期越小就越好呢?答案肯定是否定的。因為現在很多的PID控制算法都是通過計算機程序實現的,如果采樣周期太小的話,會增加計算機的CPU運算負擔和工作量,而且一般相鄰幾次的采樣不會有很大的偏差,變化也不會很大,所以采樣周期也沒必要太小。
5、PID的參數整定
PID參數的整定過程才是最重要的過程,一般的整定流程如下:
1)先只加P控制,通過調整P的參數,讓變化較快,但是到達設定值之后的振蕩幅度比較小即可。
2)然后加入I控制,這個時候適當減小P的參數值,一點點的增加I的參數,然后看輸出效果。
3)P和I都設置后好,再一點點加D,這個時候可能P、I、D三個參數都需要調整,以求最后找到比較合適的參數。
總而言之,參見下面的步驟進行:
(1)P(比例):先調大后調小,觀察輸出的響應曲線。
如果響應過沖較大,再次適當減小 P 值,直到達到理想的響應。
(2)I(積分):先將 I 設為零,逐漸增加 I 值。
觀察輸出是否有穩定的偏差,如果有,則增大 I 值。
但是要注意,過大的 I 值可能導致系統不穩定,所以需要進行適度的試驗和調整。
(3)D(微分):先將 D 設為零,逐漸增加 D 值。
觀察輸出是否有震蕩或振蕩的現象,如果有,則減小 D 值。
微分作用主要是抑制系統的過沖和震蕩,但是過大的 D 值也可能導致系統不穩定。
對于這個PID參數的整定,我個人認為沒什么一步到位的好方法,針對不同的系統,同樣的控制算法,參數都不會一樣的,還要根據實際的情況去調節。
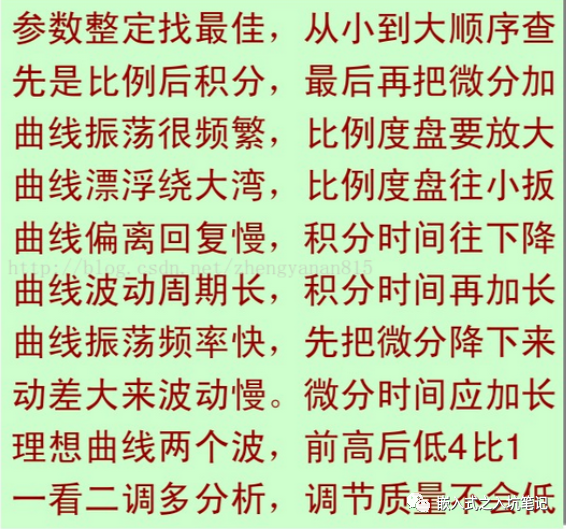
下面有一個PID參數調節的順口溜:
參數整定找最佳,從小到大順序查。
先是比例后積分,最后再把微分加。
曲線振蕩很頻繁,比例度盤要放大。
曲線漂浮繞大灣,比例度盤往小扳。
曲線偏離回復慢,積分時間往下降。
曲線波動周期長,積分時間再加長。
曲線振蕩頻率快,先把微分降下來。
動差大來波動慢,微分時間應加長。
理想曲線兩個波,前高后低4比1。
一看二調多分析,調節質量不會低 。
奉圖一張:
-
控制系統
+關注
關注
41文章
6604瀏覽量
110577 -
電位器
+關注
關注
14文章
1012瀏覽量
66767 -
控制方式
+關注
關注
0文章
55瀏覽量
10728 -
PID
+關注
關注
35文章
1472瀏覽量
85482 -
控制算法
+關注
關注
4文章
166瀏覽量
21712
發布評論請先 登錄
相關推薦

輕松解讀PID控制算法的三種參數的自整定方法
PID控制的理論和PID控制器設計的及PID控制器參數整定的以及分析





 工商網監
工商網監
評論