 pid控制中三個參數的作用
pid控制中三個參數的作用
PID控制應該算是非常古老而且應用非常廣泛的控制算法了,小到熱水壺溫度控制,大到控制無人機的飛行姿態和飛行速度等等。在電機控制中,PID算法用得尤為常見。
位置式PID 1 計算公式 在電機控制中,我們給電機輸出的是一個PWM占空比的數值。 話不多說,直接上位置式PID基本公式: 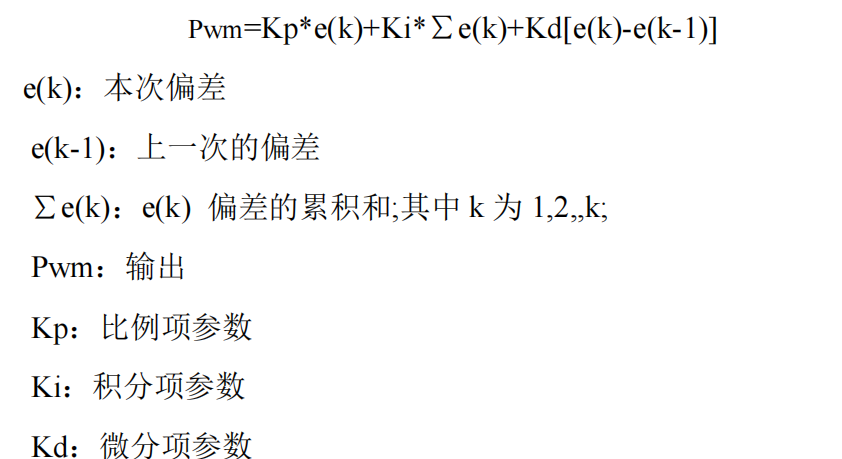 ????控制流程圖如下:
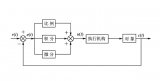
????控制流程圖如下: 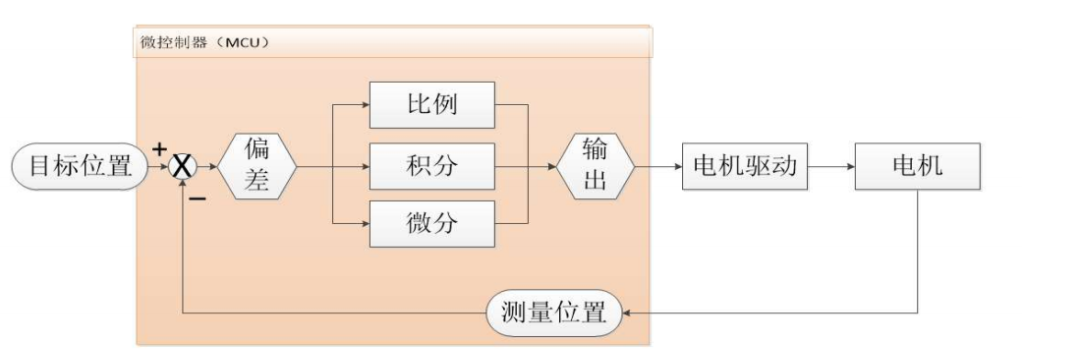 ????上圖中的目標位置一般我們可以通過按鍵或者開關等方式編程實現改變目標值,測量位置就是通過 stm32 去采集編碼器的數據。 ????目標位置和測量位置之間作差就是目前系統的偏差。送入 PID 控制器進行計算輸出,然后再經過電機驅動的功率放大控制電機的轉動去減小偏差, 最終達到目標位置的過程。 2 C語言實現 如何把我們以上的理論分析和控制原理圖使用 C 語言寫出來呢,這是一個有趣且實用的過程。位置式 PID 具體通過 C 語言實現的代碼如下:
????上圖中的目標位置一般我們可以通過按鍵或者開關等方式編程實現改變目標值,測量位置就是通過 stm32 去采集編碼器的數據。 ????目標位置和測量位置之間作差就是目前系統的偏差。送入 PID 控制器進行計算輸出,然后再經過電機驅動的功率放大控制電機的轉動去減小偏差, 最終達到目標位置的過程。 2 C語言實現 如何把我們以上的理論分析和控制原理圖使用 C 語言寫出來呢,這是一個有趣且實用的過程。位置式 PID 具體通過 C 語言實現的代碼如下:
int Position_PID (int Encoder,int Target)
{
static float Bias,Pwm,Integral_bias,Last_Bias;
Bias=Target- Encoder; //計算偏差
Integral_bias+=Bias; //求出偏差的積分
//PID基本公式
Pwm=Position_KP*Bias+Position_KI*Integral_bias+Position_KD*(Bias-Last_Bias);
Last_Bias=Bias; //保存上一次偏差
return Pwm; //輸出
}
入口參數為編碼器的位置測量值和位置控制的目標值,返回值為電機控制PWM(現在再看一下上面的控制框圖是不是更加容易明白了)。 第一行是相關內部變量的定義。 第二行是求出位置偏差,由測量值減去目標值。 第三行通過累加求出偏差的積分。 第四行使用位置式 PID 控制器求出電機 PWM。 第五行保存上一次偏差,便于下次調用。 最后一行是返回。 增量式PID 1 計算公式 速度閉環控制就是根據單位時間獲取的脈沖數(這里使用了 M 法測速)測量電機的速度信息,并與目標值進行比較,得到控制偏差,然后通過對偏差的比例、積分、微分進行控制,使偏差趨向于零的過程。 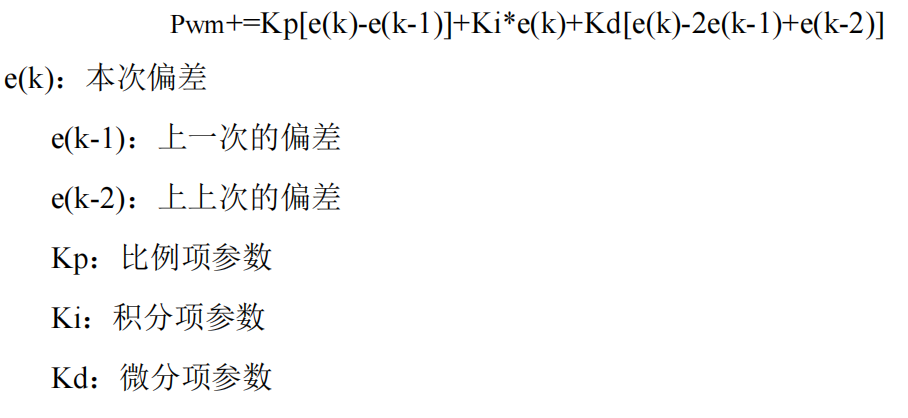 ????在我們的速度控制閉環系統里面只使用 PI 控制,因此對 PID 控制器可簡化 ????為以下公式:
????在我們的速度控制閉環系統里面只使用 PI 控制,因此對 PID 控制器可簡化 ????為以下公式:  ????控制框圖和位置式的一樣的。
????控制框圖和位置式的一樣的。 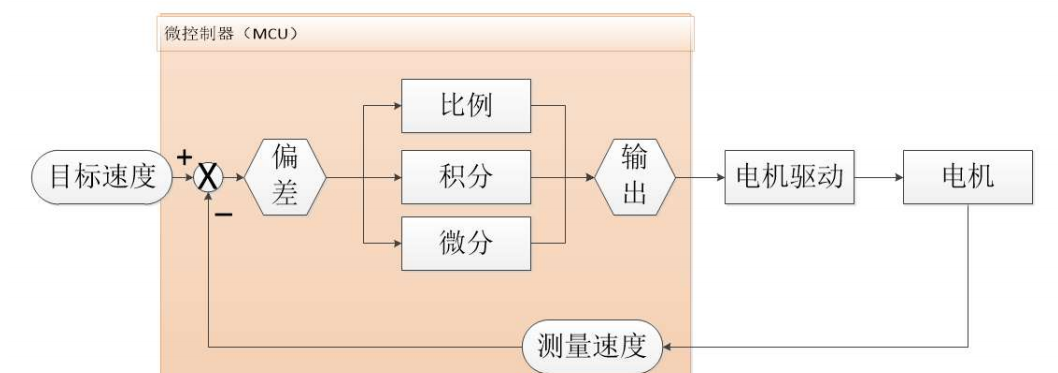 ????上圖中的目標速度一般我們可以通過按鍵或者開關等方式編程實現改變目標值,測量速度前面在編碼器的章節已經有說到就是通過單片機定時去采集編碼器的數據并清零。 ????目標速度和測量速度之間做差就是目前系統的偏差。送入 PID 控制器進行計算輸出,然后再經過電機驅動的功率放大控制電機的轉動去減小偏差, 最終達到目標速度的過程。 2 C語言實現 如何把我們以上的理論分析和控制原理圖使用 C 語言寫出來呢,這是一個有趣且實用的過程。位置式 PID 具體通過 C 語言實現的代碼如下:
????上圖中的目標速度一般我們可以通過按鍵或者開關等方式編程實現改變目標值,測量速度前面在編碼器的章節已經有說到就是通過單片機定時去采集編碼器的數據并清零。 ????目標速度和測量速度之間做差就是目前系統的偏差。送入 PID 控制器進行計算輸出,然后再經過電機驅動的功率放大控制電機的轉動去減小偏差, 最終達到目標速度的過程。 2 C語言實現 如何把我們以上的理論分析和控制原理圖使用 C 語言寫出來呢,這是一個有趣且實用的過程。位置式 PID 具體通過 C 語言實現的代碼如下:
int Incremental_PI (int Encoder,int Target)
{
static float Bias,Pwm,Last_bias;
Bias=Encoder-Target; //計算偏差
//增量式 PI 控制器
Pwm+=Velocity_KP*(Bias-Last_bias)+Velocity_KI*Bias;
Last_bias=Bias; //保存上一次偏差
return Pwm; //增量輸出
}
入口參數為編碼器的速度測量值和速度控制的目標值,返回值為電機控制 PWM。 第一行是相關內部變量的定義。
第二行是求出速度偏差,由測量值減去目標值。 第三行使用增量 PI 控制器求出電機 PWM。
第四行保存上一次偏差,便于下次調用。
最后一行是返回。
P、I、D各個參數的作用
自動控制系統的性能指標主要有三個方面:穩定性、快速性、準確性。 穩定性:
系統在受到外作用后,若控制系統使其被控變量隨時間的增長而最終與給定期望值一致,則稱系統是穩定的,我們一般稱為系統收斂。 如果被控量隨時間的增長,越來越偏離給定值,則稱系統是不穩定的,我們一般稱為系統發散。穩定的系統才能完成自動控制的任務,所以,系統穩定是保證控制系統正常工作的必要條件。
一個穩定的控制系統其被控量偏離給定值的初始偏差應隨時間的增長逐漸減小并趨于零。
快速性:
快速性是指系統的動態過程進行的時間長短。過程時間越短,說明系統快速性越好,過程時間持續越長,說明系統響應遲鈍,難以實現快速變化的指令信號。 穩定性和快速性反映了系統在控制過程中的性能。系統在跟蹤過程中,被控量偏離給定值越小,偏離的時間越短,說明系統的動態精度偏高。
準確性:
是指系統在動態過程結束后,其被控變量(或反饋量)對給定值的偏差而言,這一偏差即為穩態誤差,它是衡量系統穩態精度的指標,反映了動態過程后期的性能。
在實踐生產工程中,不同的控制系統對控制器效果的要求不一樣。比如平衡車、倒立擺對系統的快速性要求很高,響應太慢會導致系統失控。 智能家居里面的門窗自動開合系統,對快速性要求就不高,但是對穩定性和準確性的要求就很高,所以需要嚴格控制系統的超調量和靜差。
審核編輯:彭菁
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
電機控制
+關注
關注
3536文章
1880瀏覽量
268906 -
編碼器
+關注
關注
45文章
3646瀏覽量
134691 -
PWM
+關注
關注
114文章
5191瀏覽量
214154 -
參數
+關注
關注
11文章
1838瀏覽量
32272 -
PID控制
+關注
關注
10文章
460瀏覽量
40114
原文標題:STM32單片機實現電機的PID控制
文章出處:【微信號:c-stm32,微信公眾號:STM32嵌入式開發】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

要讓PID控制到達最佳效果,要先明白P、I、D這三個參數的含義和作用資料下載
電子發燒友網為你提供要讓PID控制到達最佳效果,要先明白P、I、D這三個參數的含義和作用資料下載的電子資料下載,更有其他相關的電路圖、源代碼
發表于 04-21 08:40
?7次下載

pid調節器的三個重要參數 pid調節器工作原理
PID調節器是一種常見的控制系統,它可以通過對輸入信號進行處理,控制輸出信號來維持目標參數的穩定性。PID調節器的
發表于 03-25 11:37
?2.3w次閱讀
PID控制中的反饋機制解析
PID控制器的名稱來源于其三個核心控制參數:比例(Proportional)、積分(Integral)和微分(Derivative)。這





 工商網監
工商網監
評論