在高級別自動(dòng)駕駛功能應(yīng)用中,車輛的智駕系統(tǒng)必須能夠解決corner case,即罕見卻又無法完全避免的極端場景。這些場景數(shù)據(jù)樣本較少,一旦模型不能有效識別,可能引發(fā)嚴(yán)重的安全事故。
前段時(shí)間,百度在Create大會(huì)上的輔助駕駛板塊發(fā)布了一個(gè)挺硬核的內(nèi)容,或許能有效解決corner case,車路一體的BEV感知方案——UniBEV。
BEV自動(dòng)駕駛感知好比一個(gè)從高處統(tǒng)觀全局的“上帝視角”,將三維環(huán)境信息投影到二維平面,以俯視視角展示環(huán)境中的物體和地形。在路徑規(guī)劃、障礙物檢測、自動(dòng)駕駛決策等方面,BEV感知都展現(xiàn)出了其獨(dú)特的優(yōu)勢。
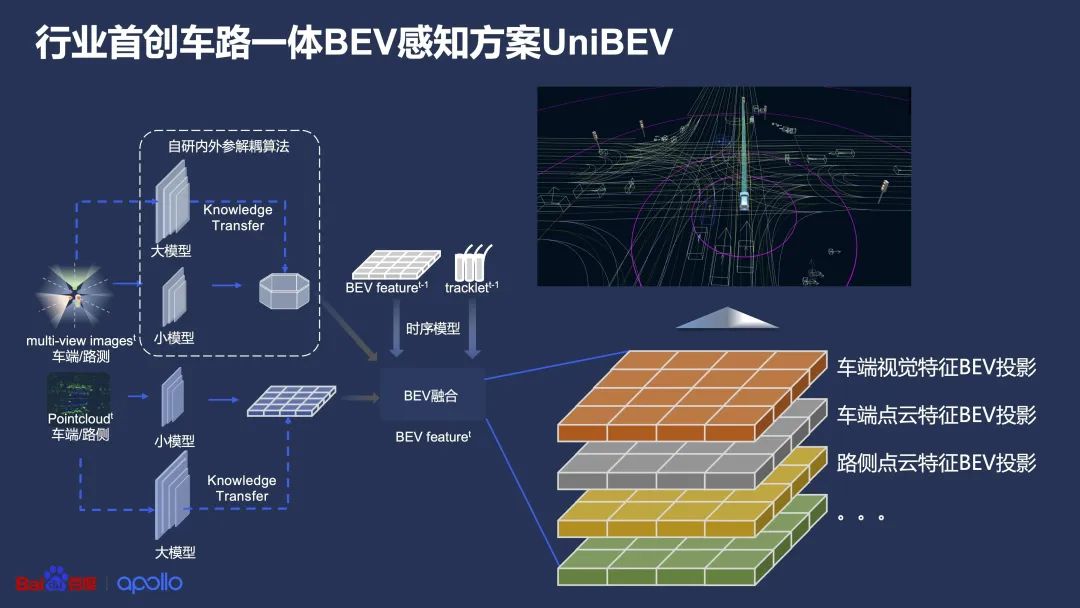
車路一體的BEV感知方案——UniBEV
路徑規(guī)劃:BEV感知可以將復(fù)雜的道路信息簡化為一系列的路徑點(diǎn),使得路徑規(guī)劃更加簡單、準(zhǔn)確。
障礙物檢測:BEV感知能夠清晰地展示出車輛周圍的障礙物,包括車輛、行人、道路標(biāo)志等,使得障礙物的檢測和識別更加準(zhǔn)確。
自動(dòng)駕駛決策:BEV感知可以為自動(dòng)駕駛系統(tǒng)提供全面的環(huán)境信息,幫助系統(tǒng)做出更加智能的決策。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報(bào)投訴
原文標(biāo)題:CVPR上的新頂流:BEV自動(dòng)駕駛感知新范式
文章出處:【微信號:CVer,微信公眾號:CVer】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
相關(guān)推薦
4D-bev標(biāo)注技術(shù)是指在3D空間中以時(shí)間作為第四個(gè)維度進(jìn)行標(biāo)注的過程。4D-bev通常在地場景較為復(fù)雜的自動(dòng)駕駛場景中使用,其可以通過精準(zhǔn)地跟蹤和記錄動(dòng)態(tài)對象的運(yùn)動(dòng)軌跡、姿勢變化以及速度等信息,全面理解和分析動(dòng)態(tài)對象在連續(xù)的時(shí)
![的頭像]() 發(fā)表于
發(fā)表于 12-06 15:01
?720次閱讀

感知、理解和預(yù)測方面表現(xiàn)得更為強(qiáng)大,徹底終結(jié)了2D直視圖+CNN時(shí)代。BEV+Transformer通過鳥瞰視角與Transformer模型的結(jié)合,顯著提升了自動(dòng)駕駛
![的頭像]() 發(fā)表于
發(fā)表于 11-07 11:19
?367次閱讀

NVIDIA 在國際計(jì)算機(jī)視覺與模式識別會(huì)議(CVPR)上展示了用于自動(dòng)駕駛汽車開發(fā)的加速計(jì)算和生成式 AI 的突破技術(shù)。
![的頭像]() 發(fā)表于
發(fā)表于 09-09 10:11
?510次閱讀
自動(dòng)駕駛飛速發(fā)展,繞不開感知、決策和控制決策的經(jīng)典框架,而感知作為自動(dòng)駕駛汽車“感官”的重要組成部分,決定了自動(dòng)駕駛系統(tǒng)對環(huán)境的理解和反應(yīng)能
![的頭像]() 發(fā)表于
發(fā)表于 08-23 10:18
?481次閱讀
領(lǐng)域的主要優(yōu)勢:
高性能與并行處理能力:
FPGA內(nèi)部包含大量的邏輯門和可配置的連接,能夠同時(shí)處理多個(gè)數(shù)據(jù)流和計(jì)算任務(wù)。這種并行處理能力使得FPGA在處理自動(dòng)駕駛中復(fù)雜的圖像識別、傳感器數(shù)據(jù)處理等
發(fā)表于 07-29 17:11
是FPGA在自動(dòng)駕駛領(lǐng)域的主要應(yīng)用:
一、感知算法加速
圖像處理:自動(dòng)駕駛中需要通過攝像頭獲取并識別道路信息和行駛環(huán)境,這涉及到大量的圖像處理任務(wù)。FPGA在處理圖像上的運(yùn)算速度快,可
發(fā)表于 07-29 17:09
自動(dòng)駕駛的識別技術(shù)是自動(dòng)駕駛系統(tǒng)中的重要組成部分,它使車輛能夠感知并理解周圍環(huán)境,從而做出智能決策。自動(dòng)駕駛識別技術(shù)主要包括多種傳感器及其融合技術(shù),以及基于這些傳感器數(shù)據(jù)的處理和識別算
![的頭像]() 發(fā)表于
發(fā)表于 07-23 16:16
?642次閱讀
2023年6月計(jì)算機(jī)視覺學(xué)術(shù)圈CVPR舉辦兩場自動(dòng)駕駛研討會(huì),一個(gè)是端到端自動(dòng)駕駛研討會(huì) (End-to-End Autonomous Driving Workshop),另一個(gè)是視覺中心自動(dòng)
![的頭像]() 發(fā)表于
發(fā)表于 04-28 14:35
?1007次閱讀

的架構(gòu),預(yù)計(jì)未來許多智能駕駛團(tuán)隊(duì)都會(huì)引入“占用網(wǎng)絡(luò)”來提升系統(tǒng)能力。多維像素的應(yīng)用前景非常廣闊。昱感微的融合感知技術(shù)+BEV +Transformer+占用網(wǎng)格有望成為L3/L4級自動(dòng)駕駛
發(fā)表于 04-11 10:26
隨著視覺算法的演進(jìn),BEV(Bird's-Eye-View Perception)感知算法成為主機(jī)廠和自動(dòng)駕駛公司發(fā)力城市場景的核心技術(shù)之一,BEV
![的頭像]() 發(fā)表于
發(fā)表于 03-29 18:18
?1909次閱讀
首先,BEV視圖存在遮擋小的優(yōu)點(diǎn),由于視覺的透視效應(yīng),現(xiàn)實(shí)世界的物體在2D圖像中很容易受到其他物體的遮擋,因此,傳統(tǒng)的基于2D的感知方式只能感知可見的目標(biāo),對于被遮擋的部分算法將無能為力。
發(fā)表于 01-25 15:38
?4157次閱讀

BEV是Bird's Eye View 的縮寫,意為鳥瞰視圖。在自動(dòng)駕駛領(lǐng)域,BEV 是指從車輛上方俯瞰的場景視圖。BEV 圖像可以提供車輛周圍環(huán)境的完整視圖,包括車輛前方、
發(fā)表于 01-17 12:33
?711次閱讀

BEV感知的主要工作。在輸入模態(tài)下," L "為LiDAR," SC "為單相機(jī)," MC "為多相機(jī)," T "為時(shí)
![的頭像]() 發(fā)表于
發(fā)表于 01-14 09:53
?1372次閱讀

BEV是Bird's Eye View 的縮寫,意為鳥瞰視圖。在自動(dòng)駕駛領(lǐng)域,BEV 是指從車輛上方俯瞰的場景視圖。
![的頭像]() 發(fā)表于
發(fā)表于 01-13 09:41
?3362次閱讀

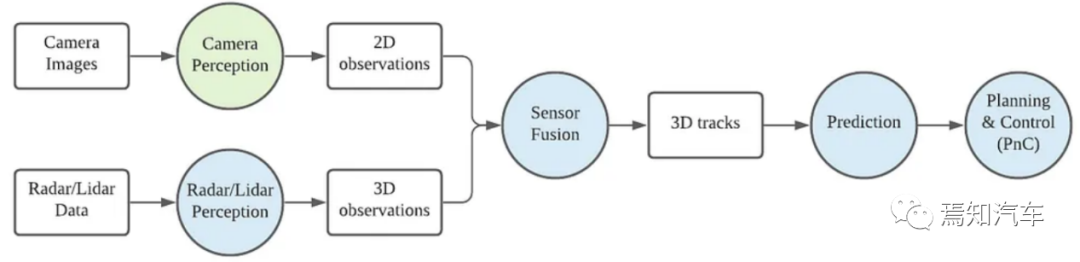
現(xiàn)代自動(dòng)駕駛系統(tǒng)的特點(diǎn)是按順序排列的模塊化任務(wù),傳統(tǒng)的方法是基于標(biāo)準(zhǔn)的感知-規(guī)劃-控制這種序列式架構(gòu)的主流處理方式。即首先將感知信息處理成人類可以理解的語義信息和道路交通信息,然后基于常態(tài)化知識
![的頭像]() 發(fā)表于
發(fā)表于 12-28 09:56
?996次閱讀
") CVPR上的新頂流:BEV自動(dòng)駕駛感知新范式
CVPR上的新頂流:BEV自動(dòng)駕駛感知新范式





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論