") 攝像機(jī)成像控制技術(shù)之3A算法解讀
攝像機(jī)成像控制技術(shù)之3A算法解讀
3A算法是攝像機(jī)成像控制技術(shù)中的三大自動(dòng)控制算法。隨著計(jì)算機(jī)視覺(jué)的迅速發(fā)展,該算法在攝像器材領(lǐng)域具有廣泛的應(yīng)用和前景。
那么3A控制算法又是指什么呢?
(1)AE (Auto Exposure)自動(dòng)曝光控制
(2)AF (Auto Focus)自動(dòng)聚焦控制
(3)AWB (Auto White Balance)自動(dòng)白平衡控制
接下來(lái),我們簡(jiǎn)單闡述一下這三個(gè)自動(dòng)控制技術(shù)的具體含義和用途。
一.自動(dòng)曝光控制
“官方”解釋:自動(dòng)曝光的目的是在不同的照明條件和場(chǎng)景中實(shí)現(xiàn)欣賞亮度級(jí)別或所謂的目標(biāo)亮度級(jí)別,從而捕獲的視頻或圖像既不太暗也不太亮。為了達(dá)到這個(gè)目的,要調(diào)整鏡頭孔徑,傳感器曝光時(shí)間,傳感器模擬增益和傳感器/ ISP數(shù)字增益,這個(gè)過(guò)程我們把它稱為自動(dòng)曝光。
換句話說(shuō),AE控制能夠根據(jù)場(chǎng)景的不同自動(dòng)調(diào)節(jié)圖像的明暗度。我們一般可以通過(guò)調(diào)節(jié)相機(jī)的光圈大小、曝光時(shí)間和增益這三個(gè)參數(shù)來(lái)改變圖像的亮度。在程序自動(dòng)曝光方式中,照相機(jī)能根據(jù)測(cè)光系統(tǒng)所測(cè)得的被攝畫(huà)面的曝光值,按照廠家生產(chǎn)時(shí)所設(shè)定的快門(mén)及光圈曝光組合,自動(dòng)地設(shè)定快門(mén)速度和光圈值。
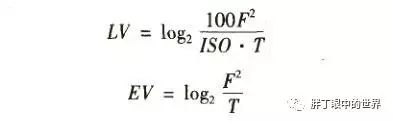
LV代表光量值,EV代表曝光值
兩個(gè)式子中:F是光圈值;T是曝光時(shí)間(單位為秒);ISO是增益大小
在這里,小編簡(jiǎn)單介紹下常用的AE控制算法,具體算法實(shí)現(xiàn)和效果在之后的推送文章中說(shuō)明和闡述。
(1)直接設(shè)置法:根據(jù)當(dāng)前場(chǎng)景的平均亮度、曝光參數(shù)(光圈大小、曝光時(shí)間等)求得此時(shí)的場(chǎng)景照度,然后計(jì)算出新的曝光參數(shù)使得調(diào)節(jié)后的圖像的平均亮度為目標(biāo)亮度值。該算法僅適用于簡(jiǎn)單的亮度分析,在普通的光照條件下效果比較好。
(2)神經(jīng)網(wǎng)絡(luò)算法:通過(guò)學(xué)習(xí)例子,設(shè)計(jì)一個(gè)BP神經(jīng)網(wǎng)絡(luò)模塊來(lái)獲得對(duì)應(yīng)于已經(jīng)設(shè)定好光圈值的曝光值。
二.自動(dòng)聚焦控制
顧名思義,即可以自動(dòng)調(diào)節(jié)圖像的焦距。當(dāng)按下照相機(jī)快門(mén)按鈕時(shí),根據(jù)被攝目標(biāo)的距離,電子測(cè)距器可以把前后移動(dòng)的鏡頭控制在相應(yīng)的位置上,或者旋轉(zhuǎn)鏡頭至需要位置,使被攝目標(biāo)成像最清晰。
一般有以下幾種算法:
(1)爬山搜索算法:取初始位置點(diǎn)a1,移動(dòng)鏡頭到a2點(diǎn),比較評(píng)價(jià)函數(shù)(輸入圖像,輸出是清晰度衡量值的函數(shù)),若f(a1)f(an2)回溯時(shí),即視作爬山完成,找到可以使成像最清晰的參考點(diǎn)。這種算法對(duì)評(píng)價(jià)函數(shù)的單峰性要求比較高,常應(yīng)用于步進(jìn)電機(jī)的平臺(tái)。(a2),則說(shuō)明是爬坡即爬山方向正確,反之即錯(cuò)誤。一般在f(an1)>
(2)全局搜索法:對(duì)整個(gè)圖像,即全程進(jìn)行搜索,記錄下最大評(píng)價(jià)函數(shù)對(duì)應(yīng)的焦距。這種方法需要合理控制搜索步長(zhǎng),可靠但是效率不夠高。
三.自動(dòng)白平衡控制
白平衡是描述顯示器中紅、綠、藍(lán)三基色混合生成后白色精確度的一項(xiàng)指標(biāo)。目的是解決色彩還原和色調(diào)處理問(wèn)題。通俗地說(shuō),白平衡就是針對(duì)不同色溫條件下,通過(guò)調(diào)整消除偏色,使拍攝出來(lái)的圖像更接近人眼的視覺(jué)習(xí)慣。
白平衡算法是我最近的研究重點(diǎn),之后會(huì)從色溫和白平衡的關(guān)系開(kāi)始分享自己的體悟。以下是我已經(jīng)用Matlab2016a運(yùn)行過(guò)的AWE控制算法:
(1)灰度世界法:以灰度世界假設(shè)為基礎(chǔ)的,即場(chǎng)景中所有物理表面的平均反射是無(wú)色差的(灰色的),RGB三通道分量的平均值趨近于同一個(gè)灰度值K。該算法適用于擁有大量色彩變化的圖像,對(duì)于單一色彩的圖片處理起來(lái)會(huì)有很大誤差。
(2)最大RGB算法:基于圖像中的最亮點(diǎn)通常是由光滑表面反射光源的實(shí)際顏色產(chǎn)生的,首先計(jì)算圖像中像素點(diǎn)RGB三通道各自的最大值,然后計(jì)算紅色和藍(lán)色通道的增益,最后根據(jù)得到的增益修正圖像中所有像素的R和B通道值。該算法適用于單一色彩的圖片如大海、藍(lán)天等。
(3)動(dòng)態(tài)閾值算法:分為白點(diǎn)檢測(cè)和白點(diǎn)調(diào)整。首先對(duì)圖像進(jìn)行劃分,求每個(gè)區(qū)域的Cr和Cb分量的平均值和方差,根據(jù)求出來(lái)的這些值篩選出系統(tǒng)認(rèn)為的白色像素點(diǎn),然后根據(jù)像素亮度值從大到小篩選出前10%左右的白點(diǎn)作為參考白點(diǎn)。最后根據(jù)這些白點(diǎn)的RGB通道的平均值計(jì)算增益,調(diào)整原圖的RGB值。
審核編輯:湯梓紅
-
算法
+關(guān)注
關(guān)注
23文章
4607瀏覽量
92838 -
計(jì)算機(jī)
+關(guān)注
關(guān)注
19文章
7488瀏覽量
87849 -
攝像機(jī)
+關(guān)注
關(guān)注
3文章
1596瀏覽量
60016 -
自動(dòng)控制
+關(guān)注
關(guān)注
10文章
714瀏覽量
44155 -
相機(jī)成像
+關(guān)注
關(guān)注
0文章
15瀏覽量
5644
原文標(biāo)題:【光電智造】相機(jī)成像之3A算法的綜述
文章出處:【微信號(hào):今日光電,微信公眾號(hào):今日光電】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
CCD攝像機(jī)選購(gòu)技巧
彩色攝像機(jī)成像的原理和具體要求
紅外攝像機(jī)技術(shù)原理圖解
網(wǎng)絡(luò)攝像機(jī)是什么意思
深入了解紅外攝像機(jī)
CCD攝像機(jī)的選購(gòu)技巧
先柯攝像機(jī)技術(shù)實(shí)現(xiàn)完美色彩與強(qiáng)大夜視效果的充分融合
全景監(jiān)控攝像機(jī)四大特性
ZeroLink技術(shù)網(wǎng)絡(luò)攝像機(jī)
視頻安全攝像機(jī)成像的進(jìn)步
網(wǎng)絡(luò)攝像機(jī)與模擬攝像機(jī)的區(qū)別是什么
解析紅外智能攝像機(jī)成像原理
AI熱成像人臉測(cè)溫攝像機(jī)介紹
高清雙光譜熱成像攝像機(jī)特點(diǎn)是什么?







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論