 AN-2021.04重要裝備姿態控制為什么要用PID閉環測量
AN-2021.04重要裝備姿態控制為什么要用PID閉環測量
本篇嘗試用通俗易懂的語言,來表述閉環物理參數測量的重要性。從原理上解釋為什么重要裝備要慎用以正向開環測量為基礎的傳感器。 由于筆者非專業出身,有些提法或觀點不一定正確,還望大伽您海涵并糾正!
第 一
這里講的重要裝備指如下幾類:
1.石油隨鉆測井(MWD)或隨鉆錄井(LWD)
2.航姿系統/飛控系統
3.某些類型的導彈
4.其它高精度長壽命的裝備
這些應用大致有幾個共同點:
1.需要使用特定的傳感器精確地測量載體所感受的一些物理量的變化情況。比如用加速度計來測量重力場/直線速度/距離;用陀螺儀來測量角加速度/角位移;用弱磁測量單元來測相對于地磁北的夾角等。只有把這些參數測準,才有望把載體的運動軌跡控制好。
2.工作期長,或儲存期長,且不能定期標定。
3.若任務失敗,可能造成較大的經費損失或災難性后果。
第 二
物理量測量主要參數的表達形式:
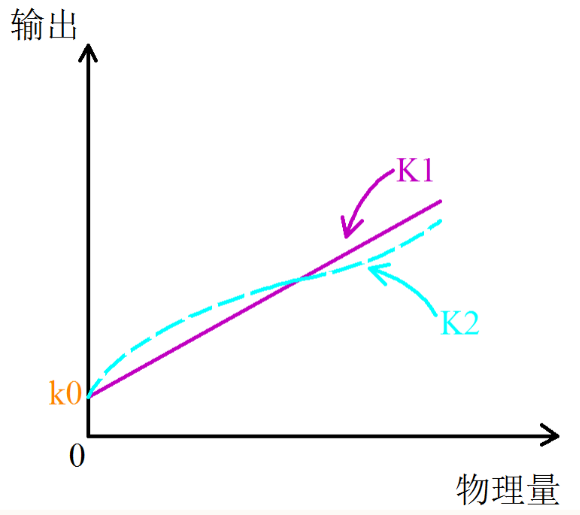
1.輸出零位(Ko),即無物理量輸入時,傳感器輸出偏移零位的值。
2.比例因子(K1),即被測物理量變化引起的傳感器輸出變化的比例。
3.二階非線性系數(K2),即測量輸出偏移比例因子K1的大小。
4.輸出零位的溫漂(dko/dT)和時漂(dko/dt)。
5.比例因子的溫漂(dk1/dT)和時漂(dk1/dt)。
第 三
傳感器的實現方式:
借助于對某種物理量敏感的材料或結構,加上電子調理電路,用電壓(V)或電流(I)的變化來間接表達當前物理量的變化情況。
以線加速度為例,其結構中含有一個慣性質量塊和一個差動電容器。外施加速度會使這個質量塊位移,從而差動電容的容值就會發生變化。將這個變化交由電子調整電路處理,便可得到一個隨外施加速度大小而變化的電壓/電流輸出。如下圖所示:
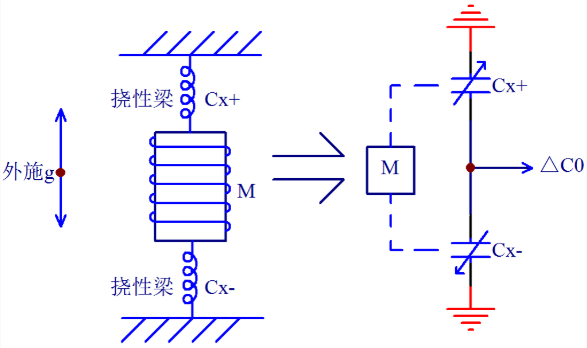
注:開環測量傳感器內部質量塊沒有力矩器線圈

硅微機械加速度計(MEMS),石英撓性加速度計,懸絲擺式加速度計均是基于上述原理實現的。
這種結構均有一個平衡點,或者叫“機械零位”。即在沒有外施加速度時,慣性質量塊在中間位置,ΔC0=0。
理論上,或者工程實踐上都會得出這樣一個結論,即在可預見的測量范圍和測量帶寬內,這個慣性質量塊偏離“機械零位”越小,則ko的時漂(dko/dt)和k1的時漂(dk1/dt)越小,K2也越小。進而測量的精度和穩定性越高。
第 四
傳感器參數變化如何影響系統?系統應用時又是如何應對的?
1.Ko、K1的大小及溫漂會導致測量的基礎值或比例發生變化。但只要在一定范圍內,且隨溫度呈現單調漂移,且無“熱遲滯”,則均可通過DSP/ISP建模修正掉。但其時漂無法建模修正,只能在使用前或不定期的標度才能完成。這在許多重要裝備上要么很難完成,要么根本無法實現。
2.K2則不然。在正向開環測量傳感器中,它會隨物理量的大小而變化。一是很難修正準確,二是擬合次數多了,很容易引發CPU中斷打架。
3.“熱遲滯”的表現特征如下圖所示:
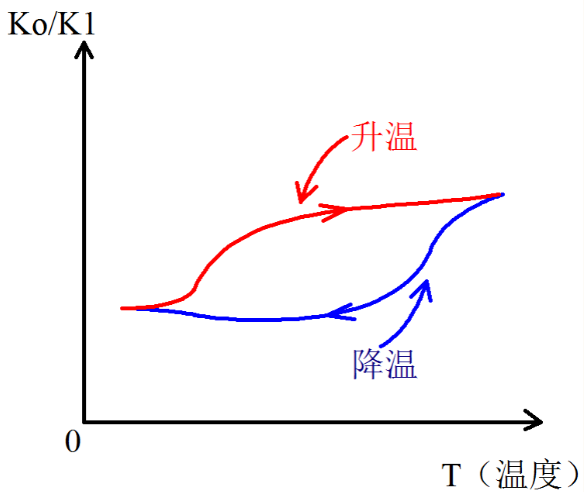
就是Ko/k1在升溫過程中和降溫過程中漂移不走同一條路,不重合。致使在某個溫度點DSP不知道是按上限補償、還是按下限補償。
總之,對于DSP很難完成或無法完成的傳感器參數建模修正的情況,均會影響裝備的測控精度。
第 五
PID閉環測量:
P指當前偏差量的大小,I是指偏差的歷史積累,D是指偏差未來的變化趨勢。
PID測控是目前已知的最優控制方法。按照其實現方式又分為模擬PID和數字PID。
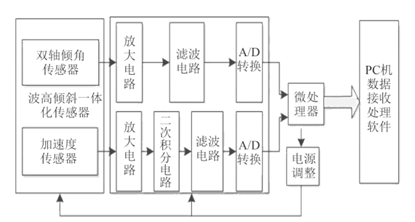
具體到線加速度計應用上,就是通過對差分電容變化情況的檢測、得到慣性質量塊相對于機械零位的變化情況。將該偏差量交由PID控制回路運算,結合固定在慣性質量塊上的力矩器,產生一個負反饋力矩,將慣性質量塊拉回到機械零位。用反饋力矩的大小來表征當前感知的加速度大小,具體原理框圖如下:
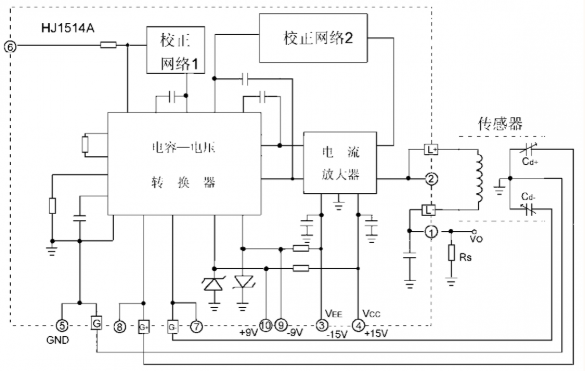
由于該方法對慣性質量塊移動的歷史,現在,將來都考慮進去了,只要整定好PID參數,在設定的測量范圍和測量帶寬內,測量精度會很高。二階非線性(k2)也小下來了。其實這點很容易理解:就是慣性質量塊位移越大,則差分電容的非線性越大。反之亦然。
由于有負反饋力矩的存在,不光保證了在測量范圍內的測量精度,也能提高加速度計在感受到異常大的加速度時的耐受力,有利于提高其抗沖擊/振動的能力。因為這時慣性質量塊雖然已脫離了機械零位,但仍然能形成一定的阻尼,減小了質量塊碰/蹭上/下限位的力道。當然也能減小振動整流誤差。
第 六
石英撓性加速度計,懸絲加速度計,撓性陀螺儀,磁通門均采用模擬PID閉環測量。優點是精度高、時漂小、溫漂小、二次非線性小。缺點是能耗大、體積大。
硅微機械(MEMS)實現的陀螺儀、加速度計、弱磁測量單元現時的主流是正向開環測量。優點是可利用業已成熟的芯片加工工藝大批量生產,成本低廉,并且能在許多工業場合或汽車家用設備上大量應用。缺點是時漂大,二次非線性大,測量精度不高。需要不定期標定。
第 七
建議設計師在應用于重要裝備上的傳感器選型上注意如下幾點:
1.從產品原理介紹上區分是不是閉環PID測量。
2.產品手冊中沒有給出時漂,二次非線性,熱遲滯參數的要慎用。
3.沒有系統地處理材料應力、加工應力、電老煉的產品要慎用。
4.合理折中測量精度與能耗、無效載荷之間的辯證關系,且勿小馬/病馬拉大車。
5.不能盲目相信計算機能補償一切誤差源。
-
伺服電路
+關注
關注
5文章
6瀏覽量
12817
發布評論請先 登錄
相關推薦
伺服電機PID控制抖動問題?
基于PID控制的溫度調節系統
什么是PID控制與傳統控制的區別
什么是PID控制器及其應用
閉環控制的主要組成包括什么
雙閉環PID先調內環還是外環
閉環增益對系統動態性能的影響
控制系統中開環和閉環如何判斷
船舶運動姿態測量應用





 工商網監
工商網監
評論