") WisBlock GPS 跟蹤器應(yīng)用指南
WisBlock GPS 跟蹤器應(yīng)用指南
該解決方案展示了如何使用 WisBlock RAK1910 GPS 模塊以及 RAK4631 WisBlock Core 和 RAK1904 WisBlock 加速度模塊創(chuàng)建 LoRaWAN GPS 跟蹤器。成功加入 LoRaWAN 網(wǎng)絡(luò)服務(wù)器后,RAK4631 將使用 RAK1904 加速度模塊檢查電路板的方向。每 10 秒檢查一次電路板的方向,如果它處于觸發(fā)位置,它將向 LoRaWan? 網(wǎng)絡(luò)服務(wù)器傳輸 GPS 信息。
前期準(zhǔn)備
#硬件
要構(gòu)建此系統(tǒng),需要以下硬件:
- WisBlock Base(本示例使用RAK5005-O)
- WisBlock Core(本示例使用RAK4631)
- WisBlock Sensor(本示例使用RAK1904、RAK1910)
- 網(wǎng)關(guān)(網(wǎng)關(guān)頻段需與傳感器模塊頻段一致,本示例使用RAK7258網(wǎng)關(guān),頻段CN470)
- USB連接線
- 鋰離子或鋰聚合物電池(可選)
#軟件
- Arduino IDE
- RAKwireless Arduino BSP
- SparkFun LIS3DH Arduino 庫
注意:
您需要在室外或靠近打開的窗戶才能接收 GPS 信號(hào)。如果您在室內(nèi)測(cè)試 GPS 模塊將無法工作。
硬件安裝
#WisBlock GPS 跟蹤器應(yīng)用指南
該解決方案展示了如何使用 WisBlock RAK1910 GPS 模塊以及 RAK4631 WisBlock Core 和 RAK1904 WisBlock 加速度模塊創(chuàng)建 LoRaWAN GPS 跟蹤器。成功加入 LoRaWAN 網(wǎng)絡(luò)服務(wù)器后,RAK4631 將使用 RAK1904 加速度模塊檢查電路板的方向。每 10 秒檢查一次電路板的方向,如果它處于觸發(fā)位置,它將向 LoRaWan? 網(wǎng)絡(luò)服務(wù)器傳輸 GPS 信息。
#前期準(zhǔn)備
#硬件
要構(gòu)建此系統(tǒng),需要以下硬件:
- WisBlock Base(本示例使用RAK5005-O)
- WisBlock Core(本示例使用RAK4631)
- WisBlock Sensor(本示例使用RAK1904、RAK1910)
- 網(wǎng)關(guān)(網(wǎng)關(guān)頻段需與傳感器模塊頻段一致,本示例使用RAK7258網(wǎng)關(guān),頻段CN470)
- USB連接線
- 鋰離子或鋰聚合物電池(可選)
#軟件
- Arduino IDE
- RAKwireless Arduino BSP
- SparkFun LIS3DH Arduino 庫
注意:
您需要在室外或靠近打開的窗戶才能接收 GPS 信號(hào)。如果您在室內(nèi)測(cè)試 GPS 模塊將無法工作。
硬件安裝
本章節(jié)為 WisBlock 傳感器節(jié)點(diǎn)組裝過程。
#LoRa天線安裝
1、將LoRa天線接口對(duì)準(zhǔn)并放置在RAK4631模塊的LoRa天線接口搭接處。
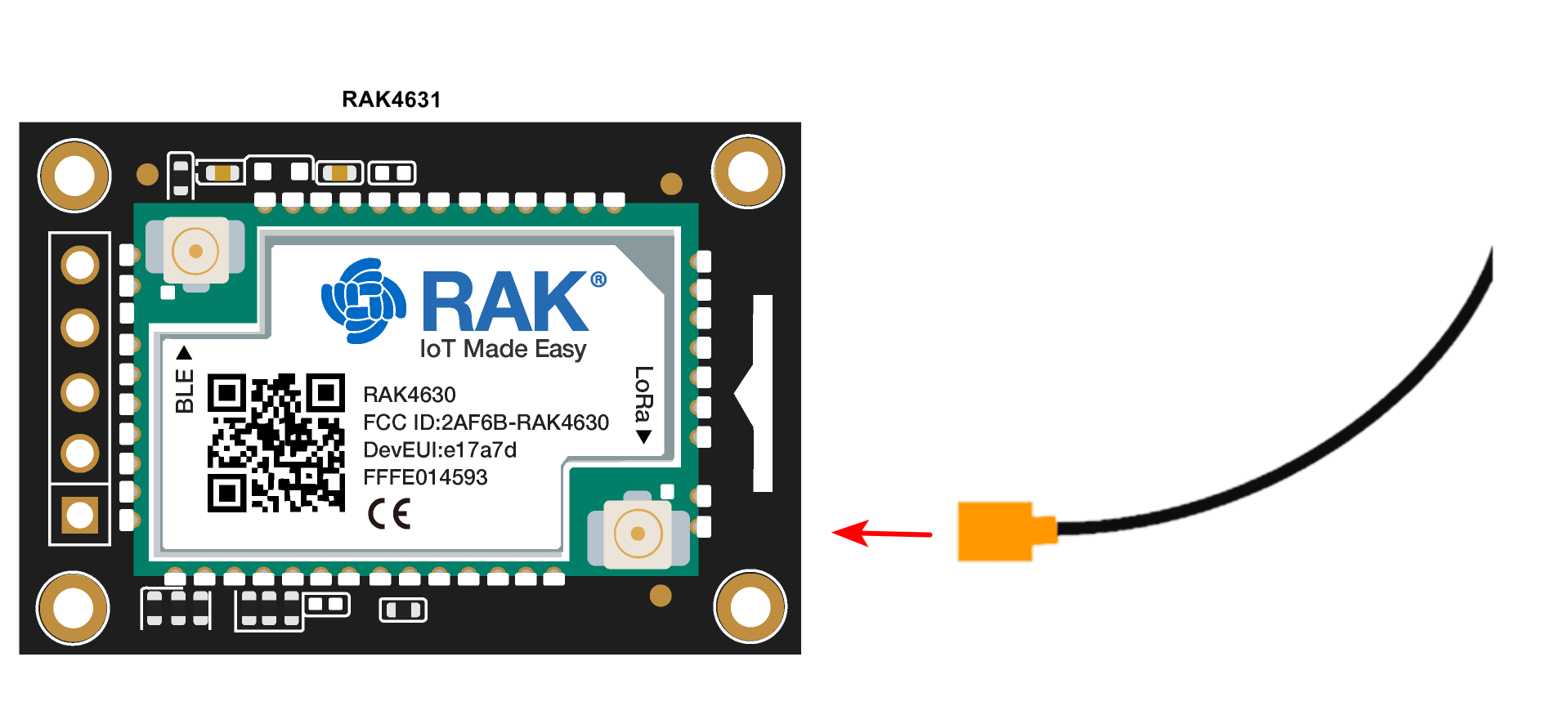 Figure 1: 安裝LoRa天線
Figure 1: 安裝LoRa天線2、輕輕按壓LoRa天線接口,將LoRa天線安裝到RAK4631上。
#GPS天線安裝
1、將LoRa天線接口對(duì)準(zhǔn)并放置在RAK1910模塊的LoRa天線接口搭接處。
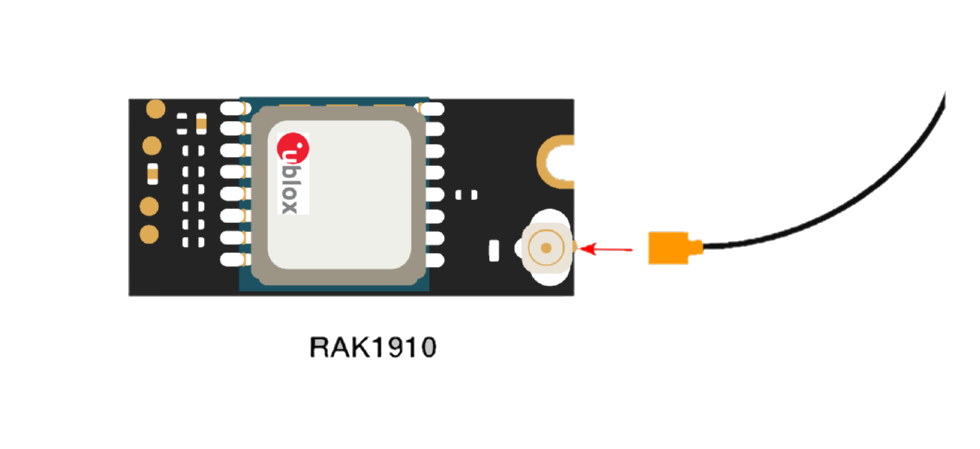 Figure 2: 安裝GPS天線
Figure 2: 安裝GPS天線2、輕輕按壓LoRa天線接口,將LoRa天線安裝到RAK1910上。
#WisBlock Core安裝
1、將RAK4631模塊上的連接器插頭對(duì)準(zhǔn)RAK5005-O CUP插槽上的連接器插座。保持連接器間平行,將其輕放在插座連接器相應(yīng)的搭接處。
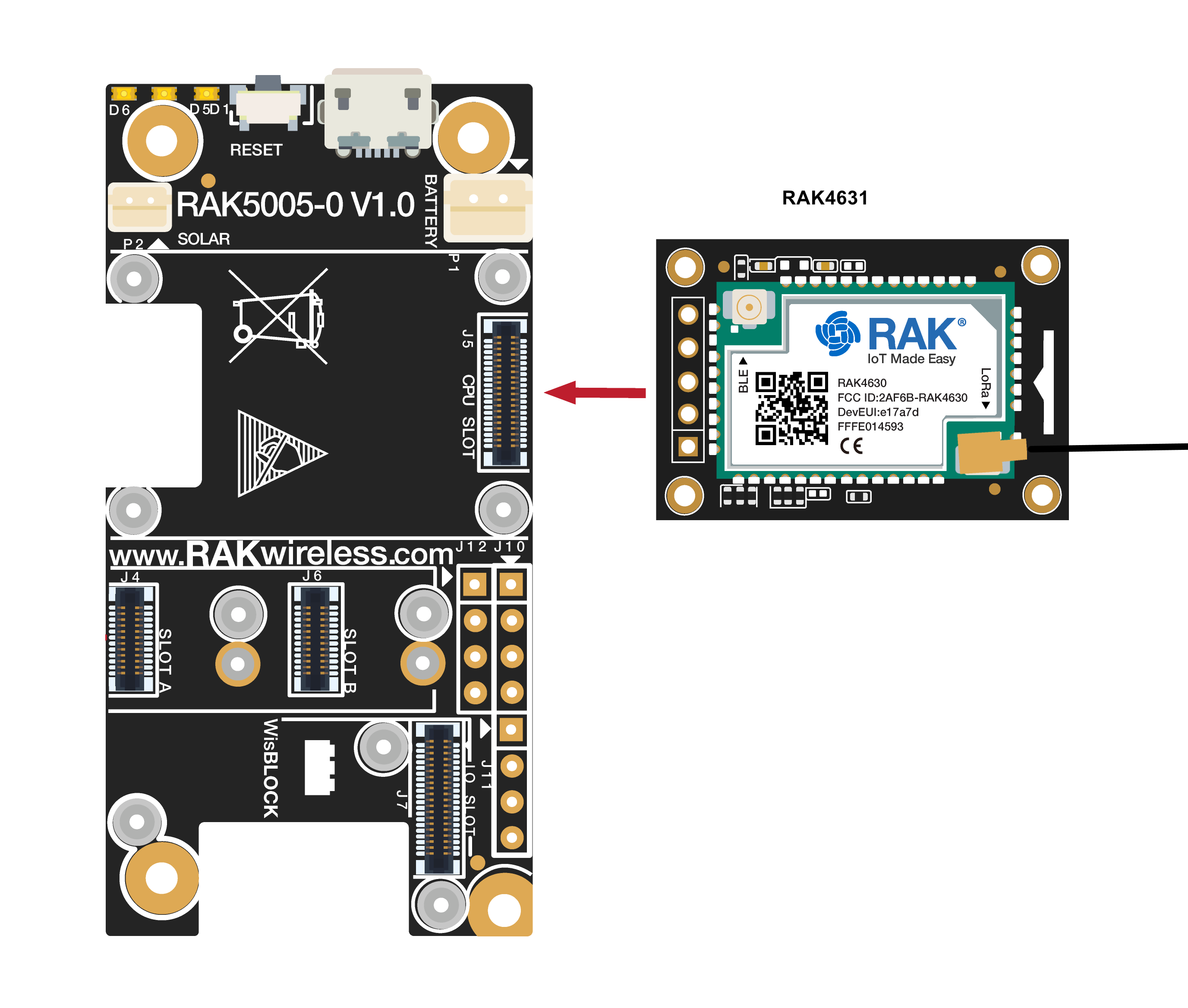 Figure 3: 安裝RAK4631
Figure 3: 安裝RAK46312、平行按壓均勻施力,聽到扣合聲音后,扣壓完成。
3、完成后,使用螺釘將模塊固定在RAK5005-O上。
#WisBlock Sensor安裝
1、將RAK1910傳感器模塊上的連接器插頭對(duì)準(zhǔn)RAK5005-O 插槽 A 上的連接器插座。保持連接器間平行,將其輕放在插座連接器相應(yīng)的搭接處。
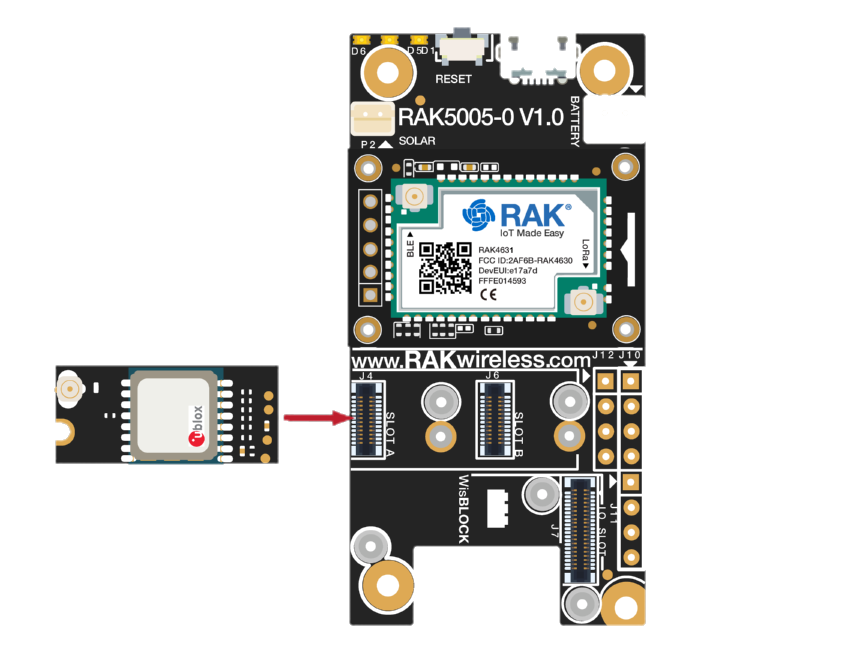 Figure 4: 安裝RAK1910
Figure 4: 安裝RAK19102、平行按壓均勻施力,聽到扣合聲音后,扣壓完成。
3、將RAK1904傳感器模塊上的連接器插頭對(duì)準(zhǔn)RAK5005-O 插槽 D 上的連接器插座。保持連接器間平行,將其輕放在插座連接器相應(yīng)的搭接處。
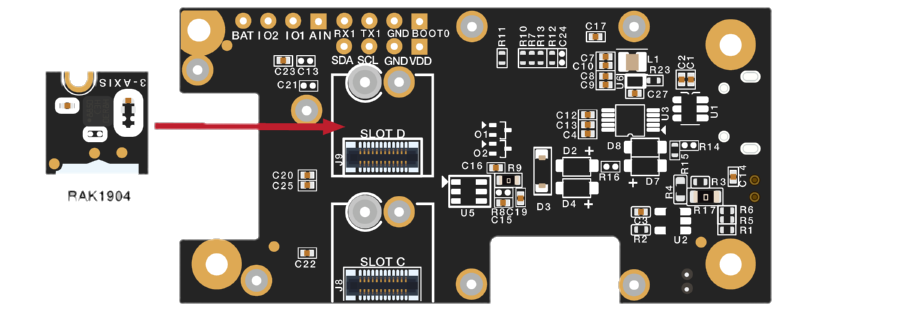 Figure 5: 安裝RAK1904
Figure 5: 安裝RAK19044、平行按壓均勻施力,聽到扣合聲音后,扣壓完成。
5、完成后,使用螺釘將RAK1910與RAK1904模塊固定在RAK5005-O上。
所有硬件安裝后,如下圖所示:
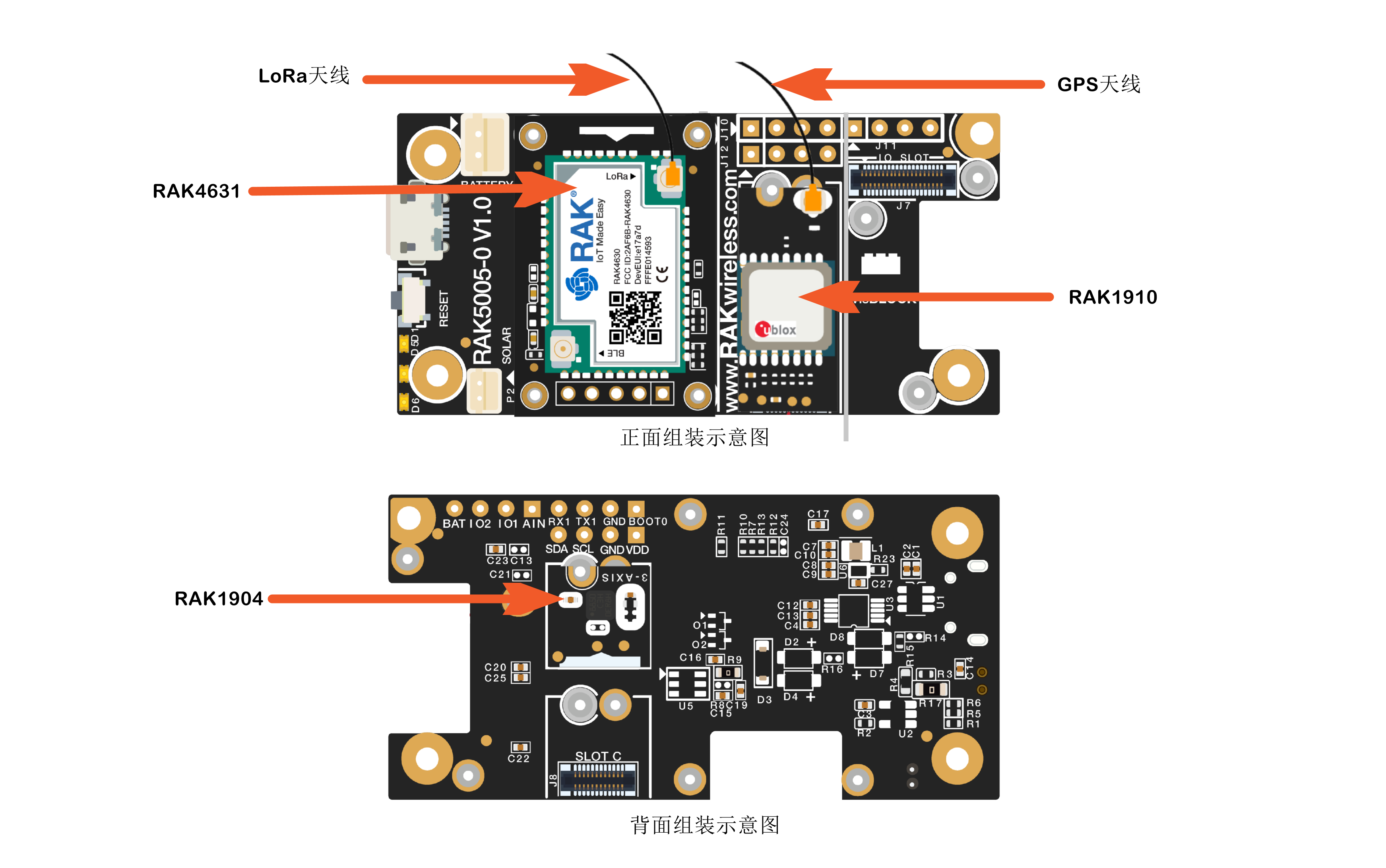 Figure 6: 完整組裝示意圖
Figure 6: 完整組裝示意圖軟件配置
本章節(jié)介紹WisBlock 傳感器模塊的軟件配置。
#Arduino IDE的下載
使用Arduino IDE對(duì)WisBlock進(jìn)行編碼和編程。如果您還未安裝Arduino IDE,可在Arduino官網(wǎng)中下載。
警告:
如果您所使用的操作系統(tǒng)為Windows 10:
請(qǐng)勿從Microsoft應(yīng)用商店中安裝Arduino IDE。請(qǐng)從Arduino官網(wǎng)中安裝原始的Arduino IDE。Microsoft應(yīng)用商店中的Arduino應(yīng)用在使用第三方板支持包時(shí)存在問題。
如下圖所示,可以看到Arduino IDE當(dāng)前版本為V1.8.16。Windows、Linux和Mac OS X都有多個(gè)可用版本,選擇正確的Arduino IDE版本并下載。
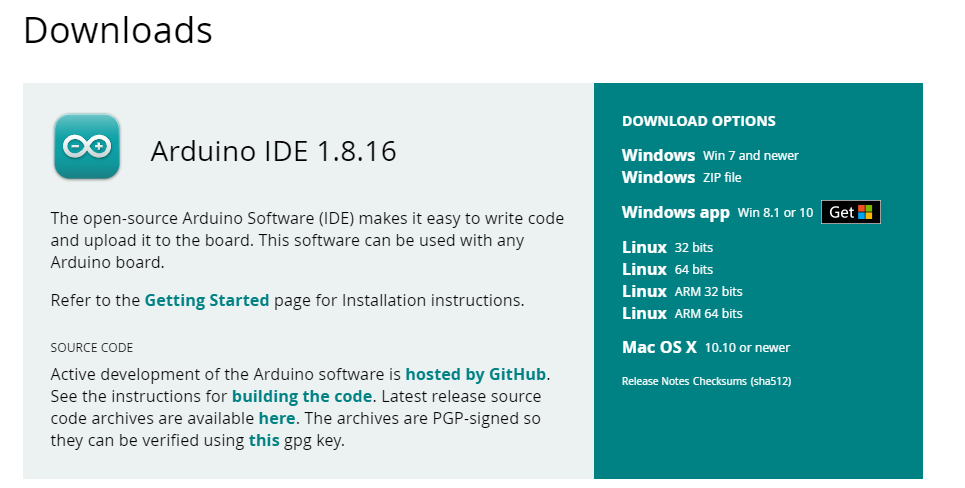 Figure 7: Arduino IDE 版本示意圖
Figure 7: Arduino IDE 版本示意圖#Arduino IDE的安裝
本示例為在Windows PC中安裝已下載的Arduino IDE。
1、單擊“I Agree”。
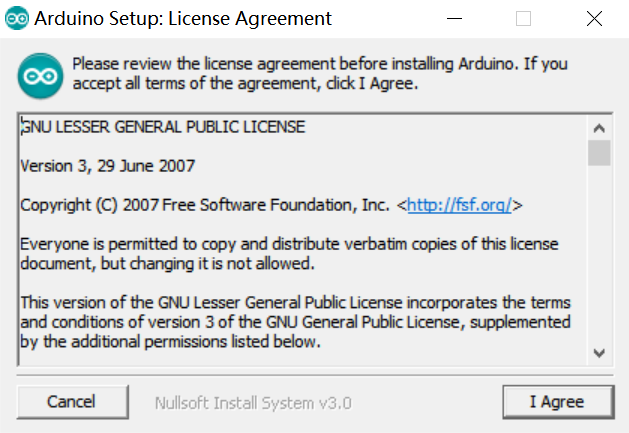 Figure 8: Arduino安裝許可協(xié)議
Figure 8: Arduino安裝許可協(xié)議2、單擊“Next”。
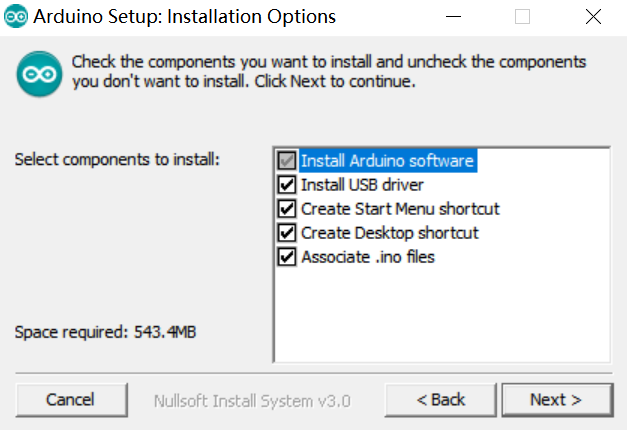 Figure 9: Arduino安裝選項(xiàng)
Figure 9: Arduino安裝選項(xiàng)3、單擊“Install”。
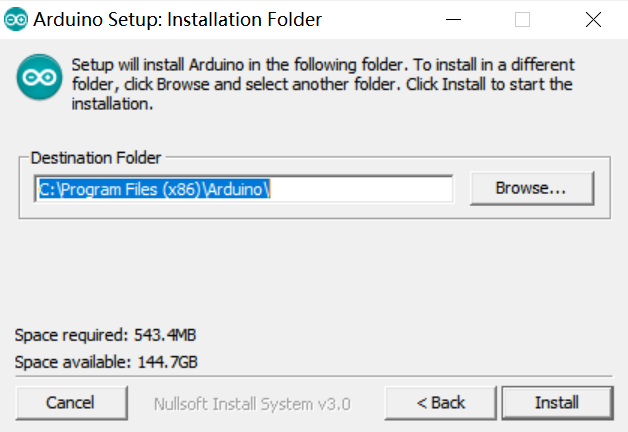 Figure 10: Arduino IDE安裝路徑
Figure 10: Arduino IDE安裝路徑 Figure 11: Arduino IDE安裝中
Figure 11: Arduino IDE安裝中進(jìn)度為100%后,Arduino IDE已成功安裝,單擊“Close”,退出安裝過程。
 Figure 12: 成功安裝
Figure 12: 成功安裝注意:
在Linux與Mac OS X中,沒有安裝過程。只是一個(gè)解壓過程,然后就能夠成功打開Arduino IDE 。
#Arduino IDE上的配置
Arduino IDE安裝成功后。需要對(duì)Arduino IDE進(jìn)行一些配置以便后續(xù)對(duì)WisBlock組裝模塊進(jìn)行相關(guān)配置。
1、打開Arduino IDE。
2、進(jìn)入“文件 > 首選項(xiàng)”。
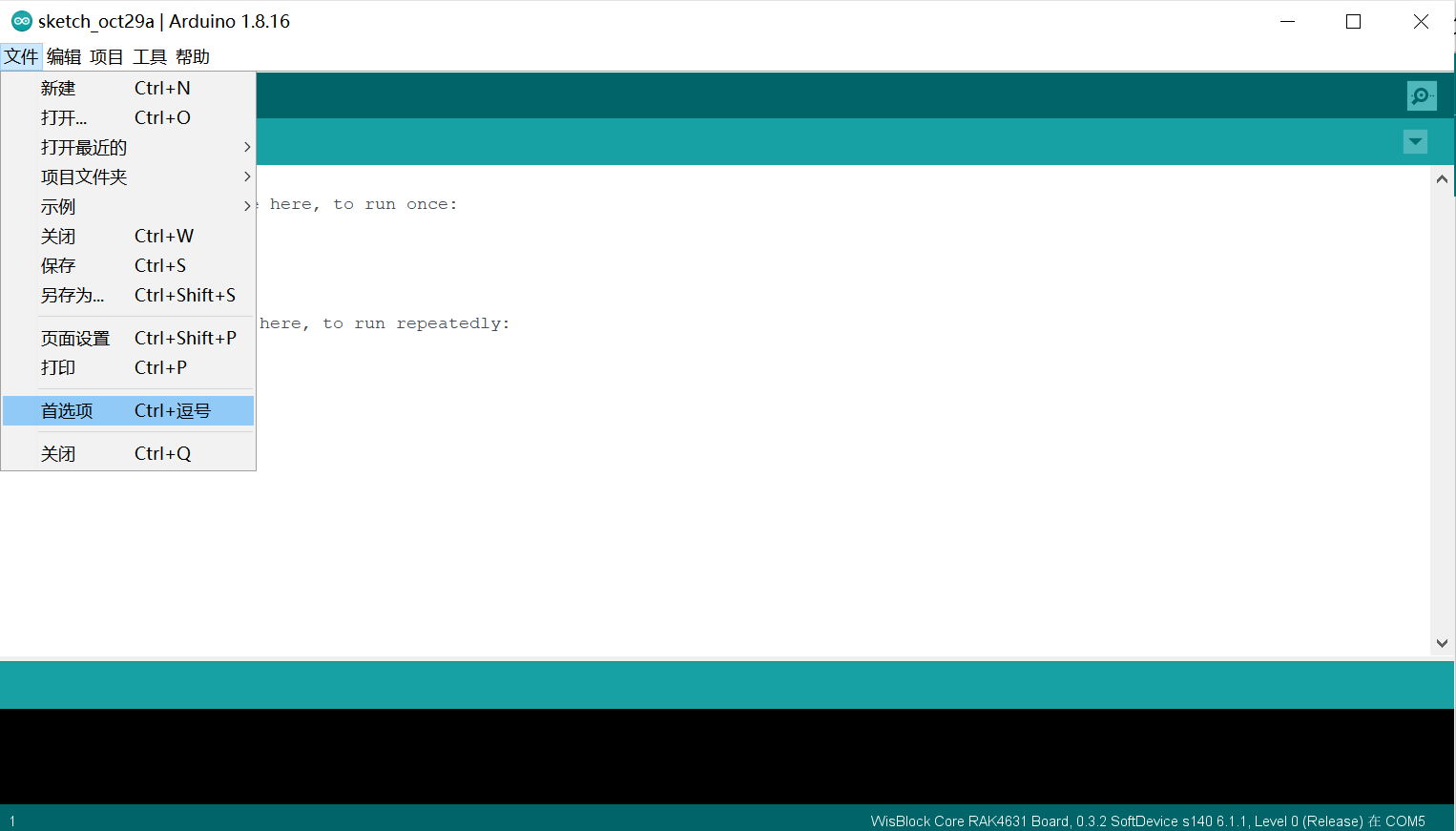 Figure 13: 首選項(xiàng)
Figure 13: 首選項(xiàng)3、單擊圖中圖標(biāo),編輯“附加開發(fā)板管理器網(wǎng)址”,將WisBlock Core添加到Arduino板列表中。
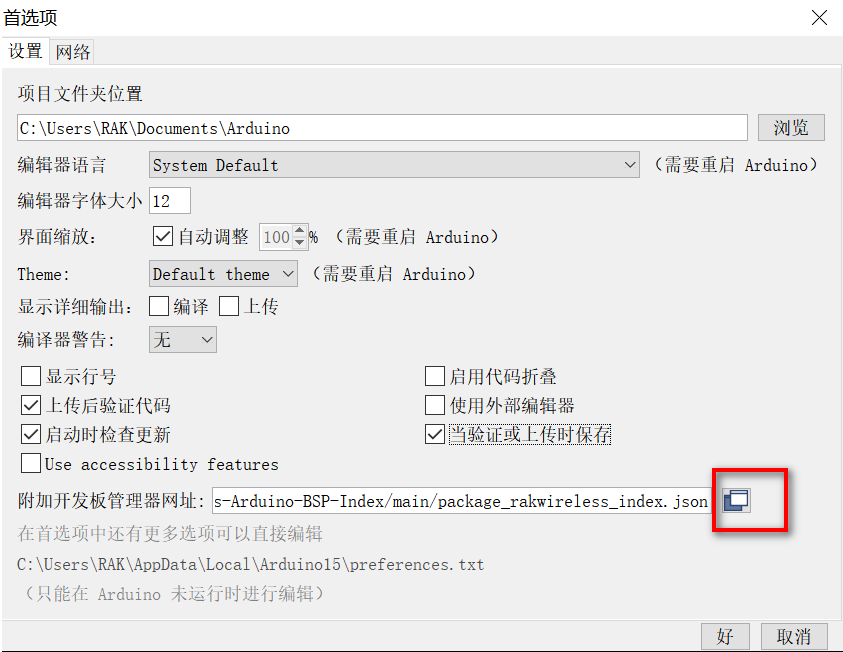 Figure 14: 修改附加開發(fā)板管理器網(wǎng)址
Figure 14: 修改附加開發(fā)板管理器網(wǎng)址4、復(fù)制此URLhttps://raw.githubusercontent.com/RAKwireless/RAKwireless-Arduino-BSP-Index/main/package_rakwireless_index.json并粘貼至下圖所示區(qū)域。如果已存在其他鏈接,將上述鏈接粘貼至新的一行。完成后,單擊“好”。
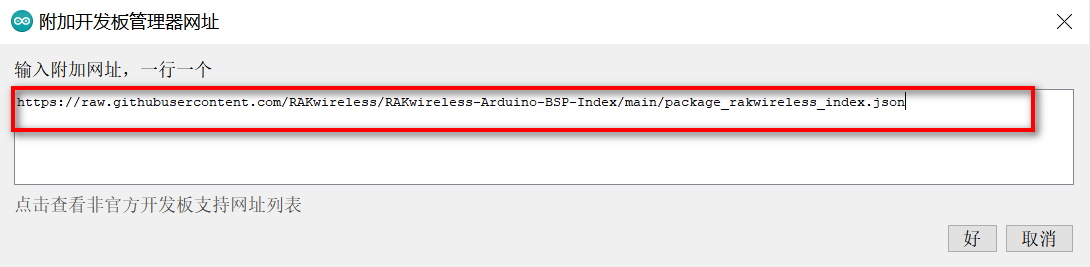 Figure 15: 添加RAKwireless WisBlock Core BSP
Figure 15: 添加RAKwireless WisBlock Core BSP注意:
如果您使用的是Linux,需要通過“pip”安裝“adafruit-nrfutil”。
sudo pip3 install adafruit-nrfutil 或 pip3 install --user adafruit-nrfutil
5、重啟Arduino IDE。
6、在“工具”菜單中打開“開發(fā)板管理”。
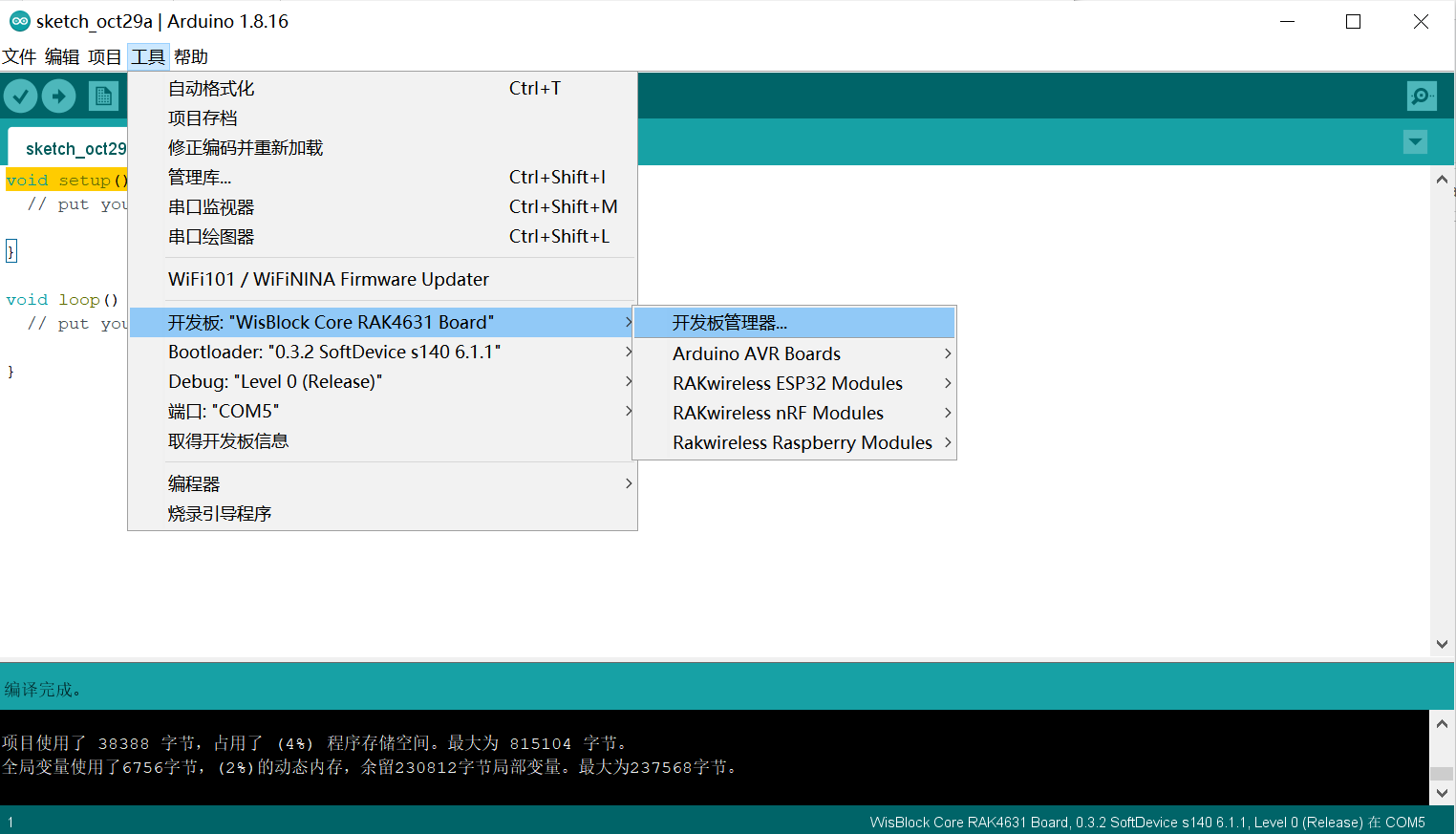 Figure 16: 打開開發(fā)板管理
Figure 16: 打開開發(fā)板管理7、如下圖所示,在搜索欄中鍵入“RAK”。將會(huì)顯示出可添加到Arduino板列表中的可用RAKwireless WisBlock Core。選擇以下板支持包以及相應(yīng)的版本,并單擊“安裝”板支持包。
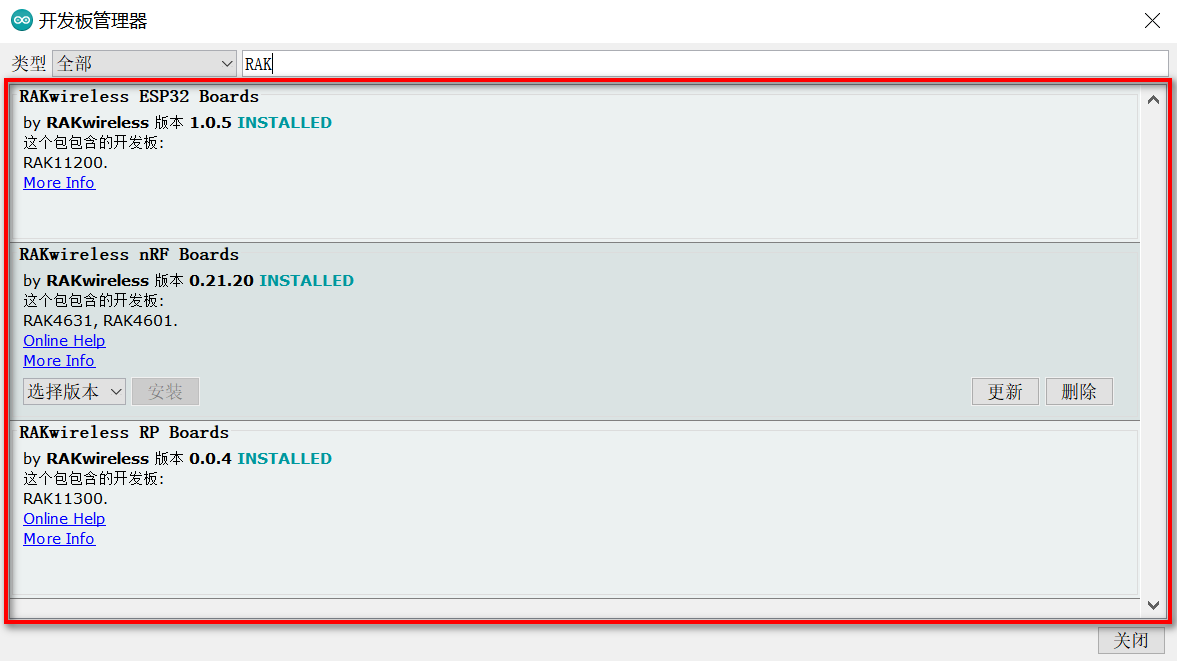 Figure 17: 安裝WisBlock Core
Figure 17: 安裝WisBlock Core#燒錄程序
1、將組裝的WisBlock傳感器模塊使用USB連接線連接到PC上。
2、在Arduino IDE中,根據(jù)下圖所示,選擇WisBlock Core RAK4631板。
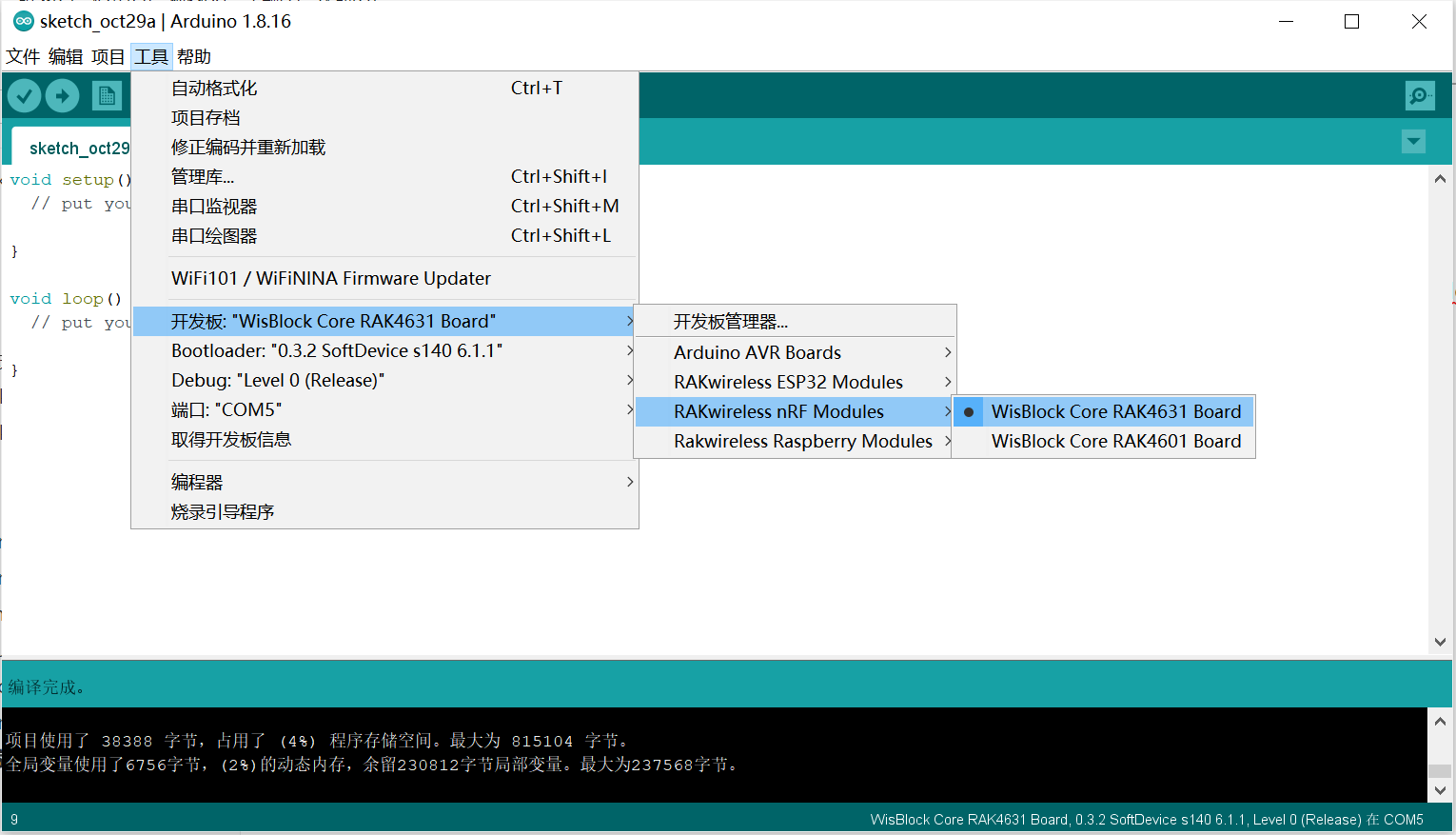 Figure 18: 選擇WisBlock Core RAK4631板
Figure 18: 選擇WisBlock Core RAK4631板3、根據(jù)下圖所示,選擇示例項(xiàng)目。
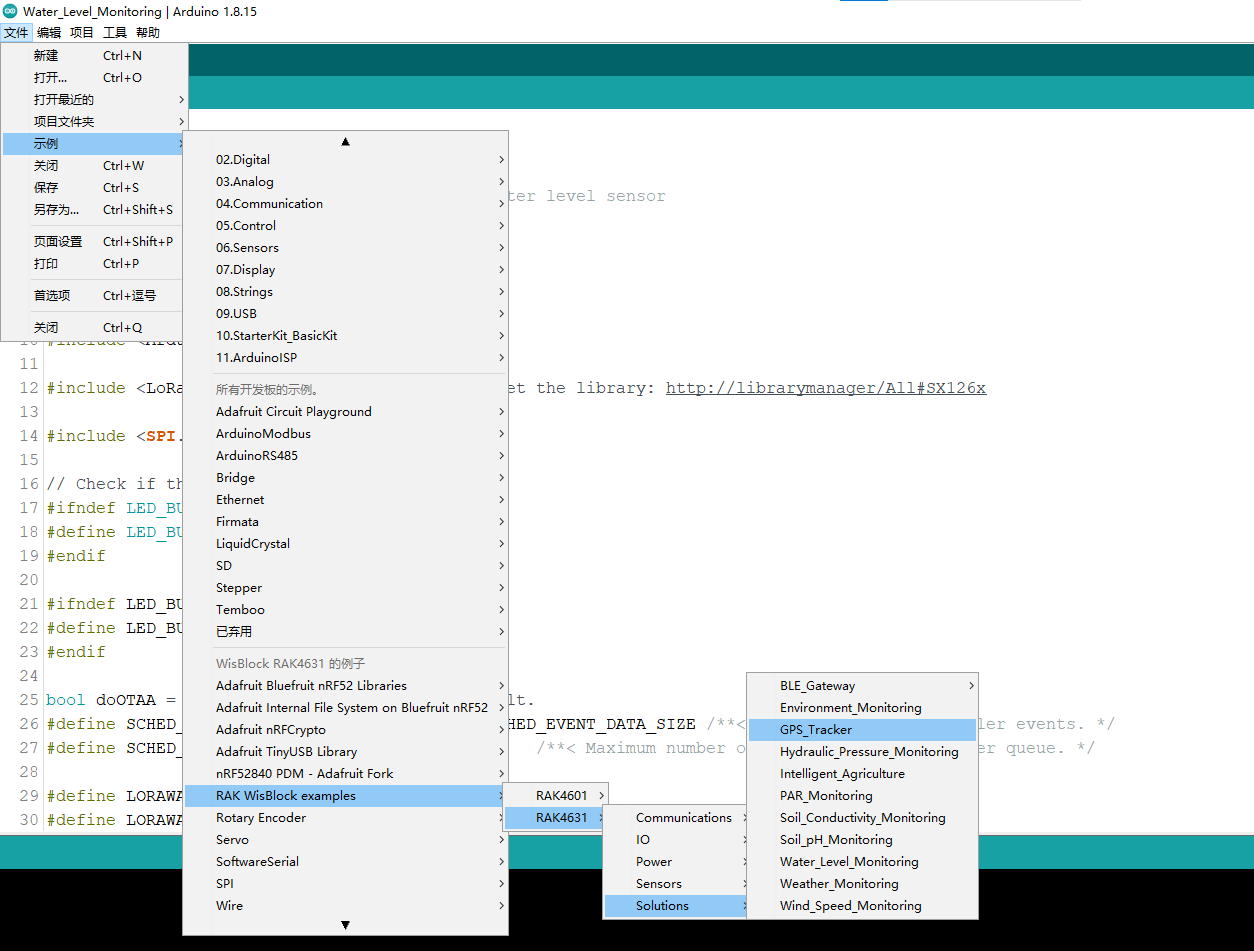 Figure 19: 選擇示例代碼
Figure 19: 選擇示例代碼4、打開示例代碼后,雙擊圖中鏈接,安裝示例代碼中所需的代碼庫。
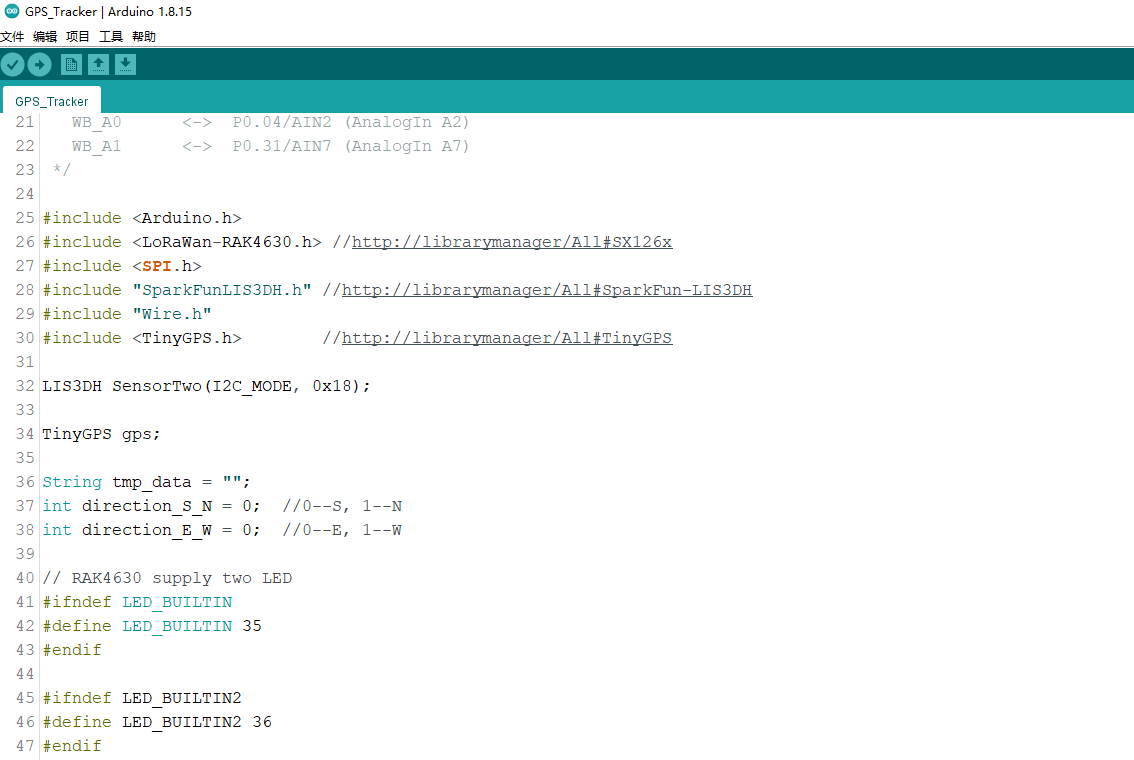 Figure 20: 安裝所需代碼庫
Figure 20: 安裝所需代碼庫5、修改示例代碼中的頻段區(qū)域,本示例使用的為CN470。
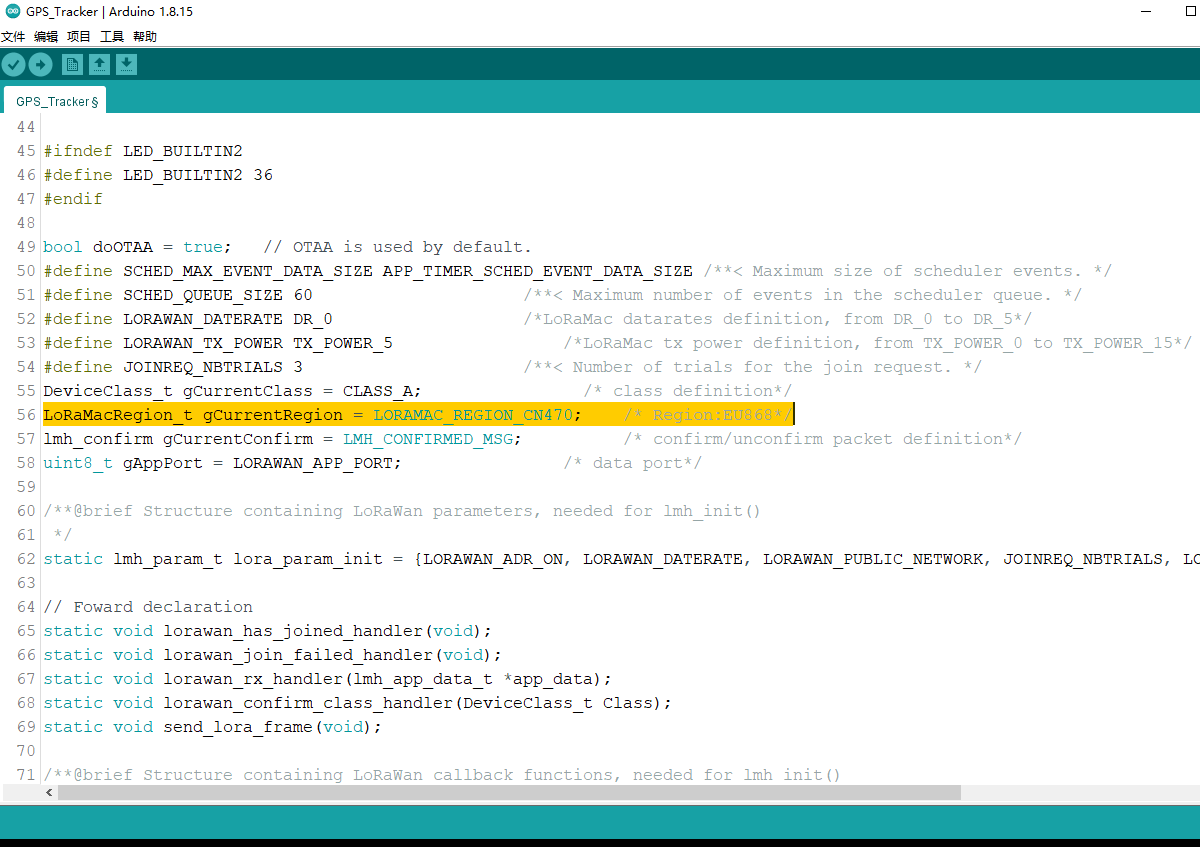 Figure 21: 修改頻段
Figure 21: 修改頻段6、完成后,如下圖所示,選擇正確的串口并單擊圖中上傳圖標(biāo)上傳代碼。
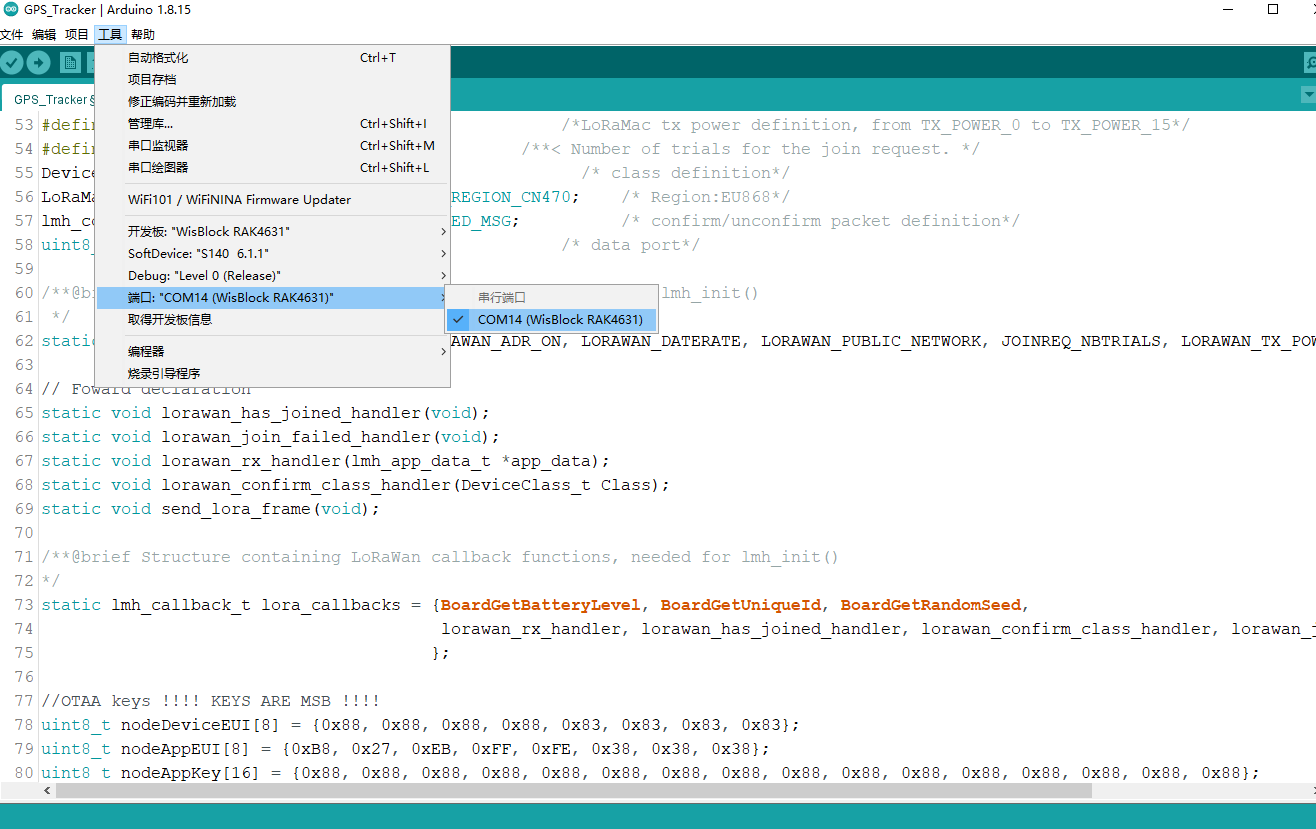 Figure 22: 選擇端口號(hào)
Figure 22: 選擇端口號(hào)連接到RAK網(wǎng)關(guān)內(nèi)置服務(wù)器
#前提條件
- 傳感器模塊在LoRaWAN?網(wǎng)關(guān)覆蓋范圍之內(nèi)。
- 已登錄商業(yè)網(wǎng)關(guān)。
- 已在網(wǎng)關(guān)Web頁面“LoRa Network > Network Settings”中設(shè)置網(wǎng)關(guān)"Mode"為“Network Server”,即表示使用網(wǎng)關(guān)內(nèi)置服務(wù)器。
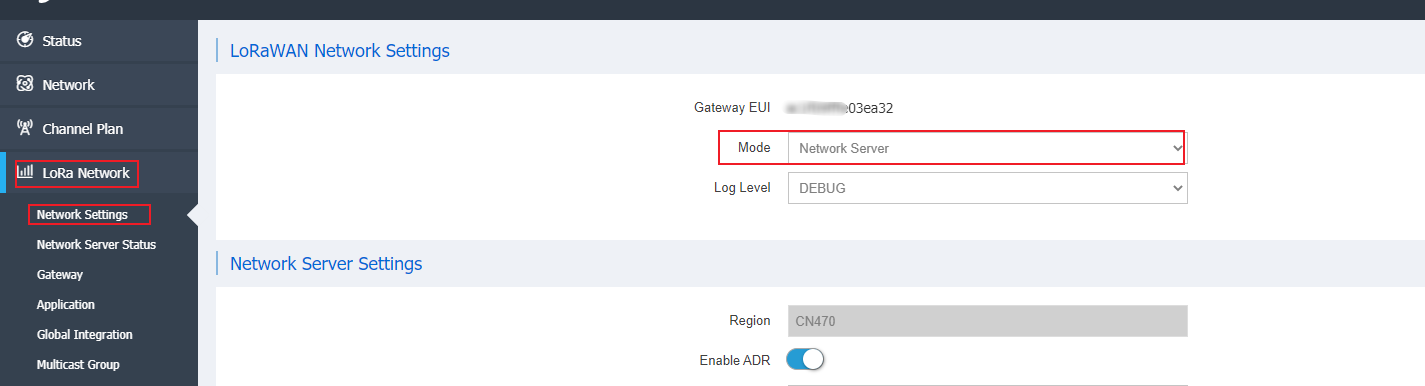 Figure 23: 網(wǎng)關(guān)設(shè)置為內(nèi)置服務(wù)器模式
Figure 23: 網(wǎng)關(guān)設(shè)置為內(nèi)置服務(wù)器模式- 已在網(wǎng)關(guān)Web頁面“Channel Plan”上配置需要的"Region"。本示例中頻段為CN470,通道為80-87。
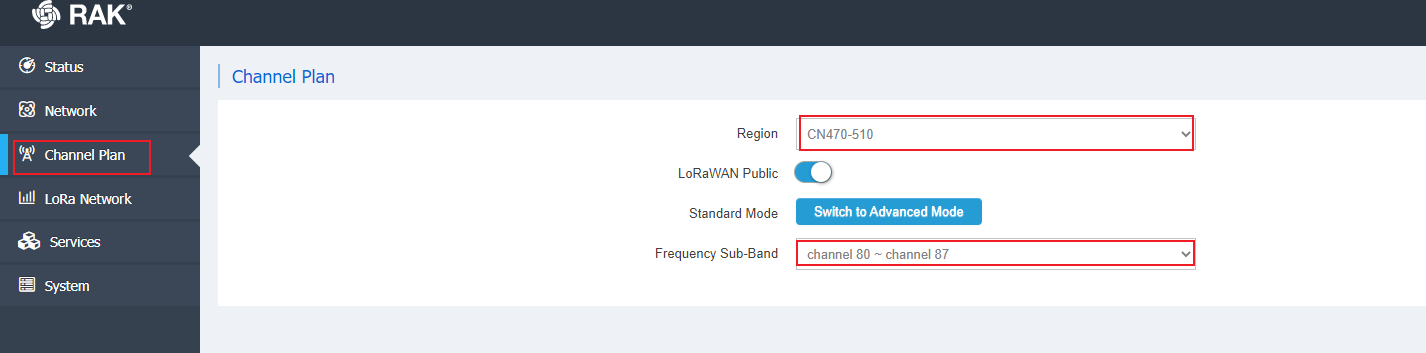 Figure 24: 選擇頻段和通道
Figure 24: 選擇頻段和通道#創(chuàng)建應(yīng)用并添加節(jié)點(diǎn)
1、在左側(cè)導(dǎo)航樹選擇“LoRa Network > Application”。
2、輸入應(yīng)用名稱,選擇“Type 1 : Unified Application Key”,單擊“Add”。
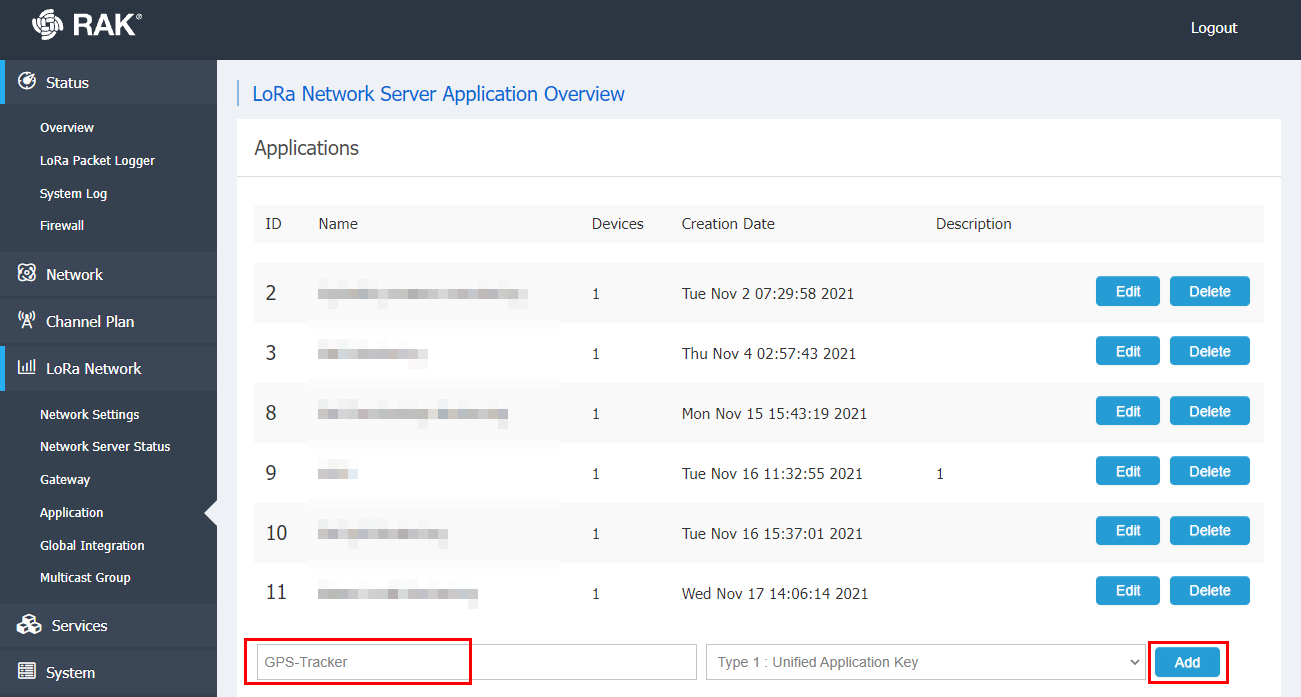 Figure 25: 添加節(jié)點(diǎn)
Figure 25: 添加節(jié)點(diǎn)3、設(shè)置應(yīng)用參數(shù)。
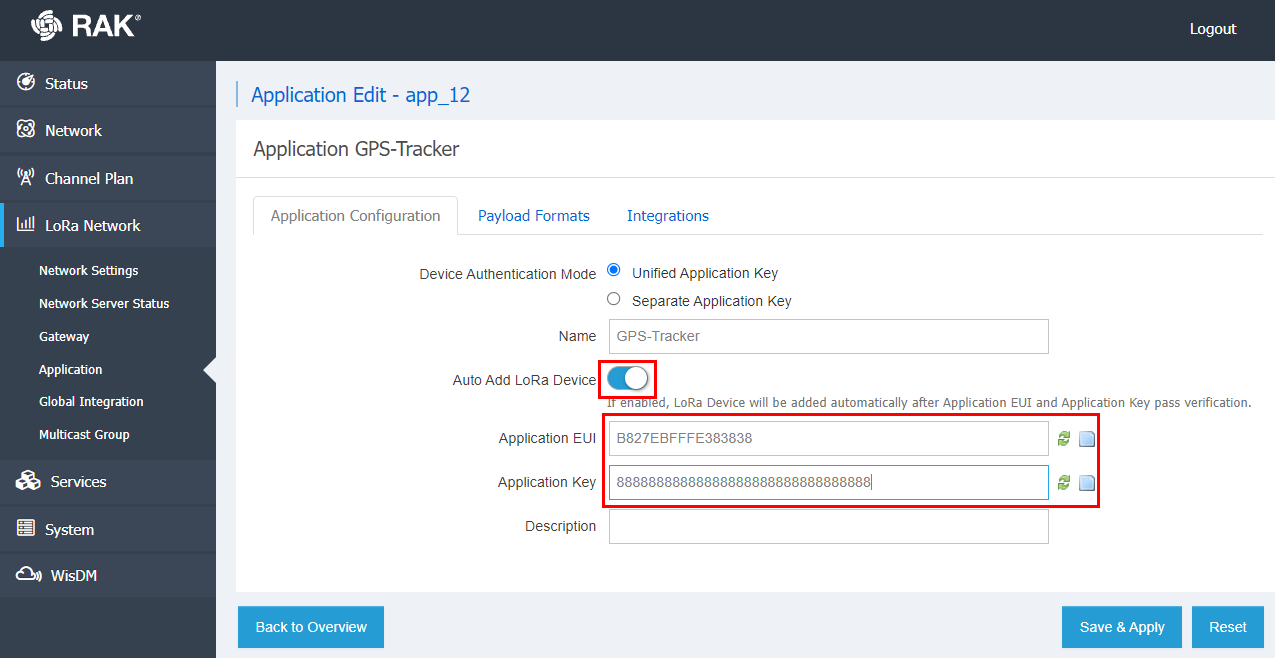 Figure 26: 設(shè)置應(yīng)用參數(shù)
Figure 26: 設(shè)置應(yīng)用參數(shù)其中“Application EUI”和“Application Key”參數(shù),從土壤電導(dǎo)率傳感器示例代碼中獲取:
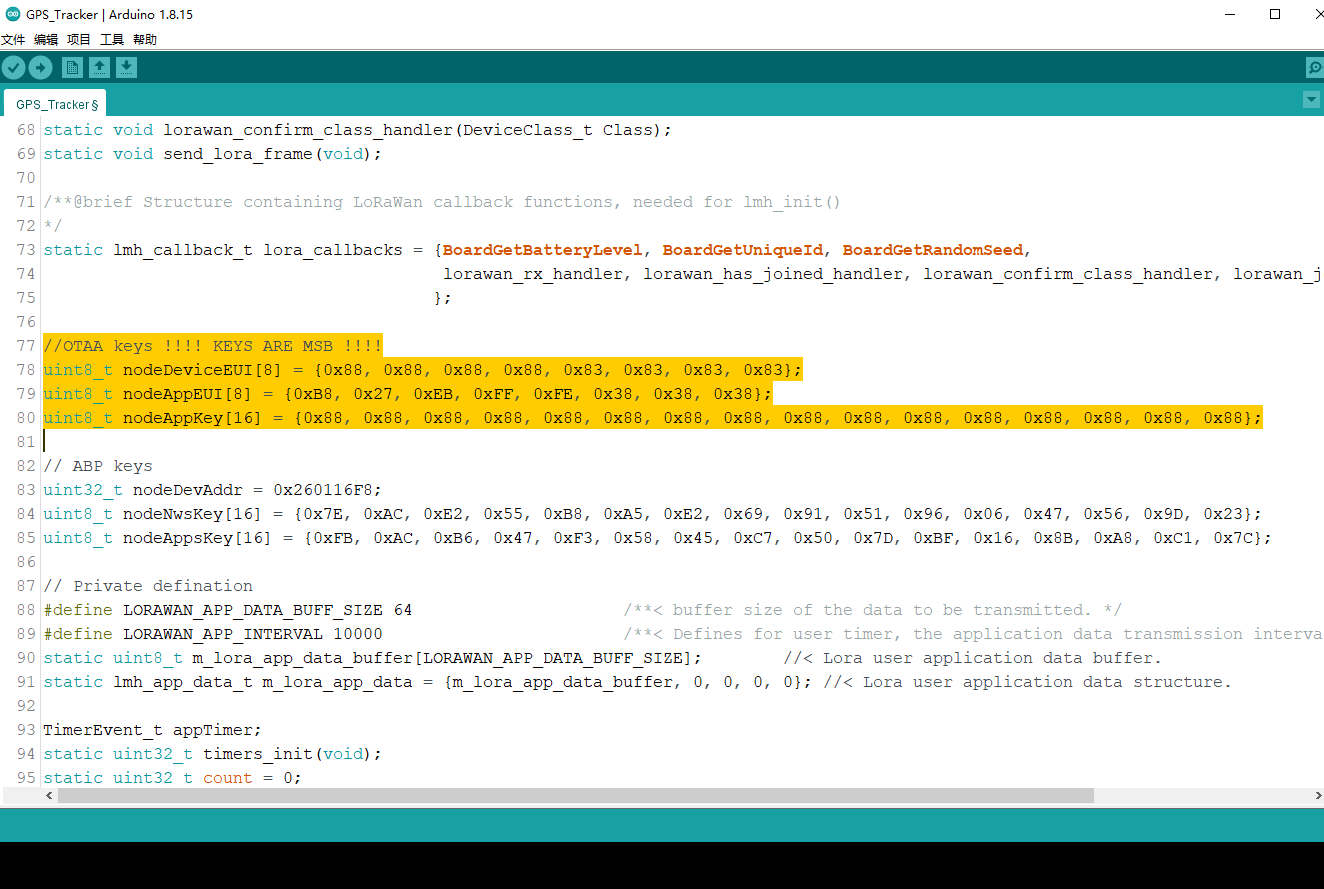 Figure 27: 獲取“Application EUI”和“Application Key”參數(shù)
Figure 27: 獲取“Application EUI”和“Application Key”參數(shù)注意:
- 示例中使用的是OTAA加網(wǎng)方式,所以選用的是"OTAA keys"相關(guān)參數(shù),根據(jù)實(shí)際選擇“OTAA”或“ABP”參數(shù)。
- Application EUI:在傳感器示例代碼中獲取,切記需要?jiǎng)h除各個(gè)數(shù)字前的“0x”以及“,”。
- Application Key:在傳感器示例代碼中獲取,切記需要?jiǎng)h除各個(gè)數(shù)字前的“0x”以及“,”。
4、單擊“Save & Apply”。
5、單擊新建應(yīng)用后面的"Edit",進(jìn)入應(yīng)用編輯頁面。添加節(jié)點(diǎn)并設(shè)置如下參數(shù),然后單擊"Save & Apply"保存配置。
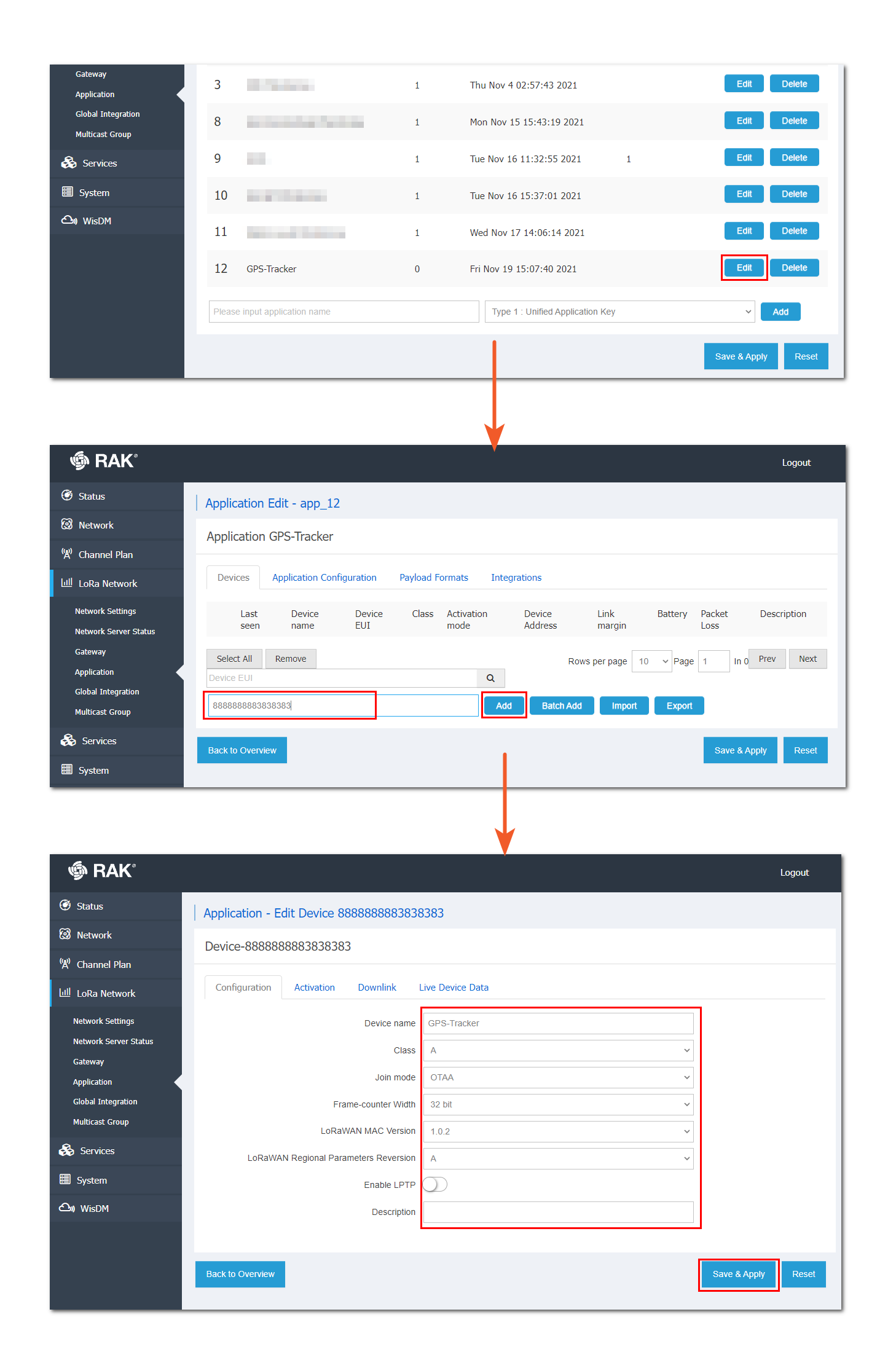 Figure 28: 添加節(jié)點(diǎn)
Figure 28: 添加節(jié)點(diǎn)其中“Device EUI”參數(shù),從土壤電導(dǎo)率傳感器示例代碼中獲取:
Figure 29: 獲取設(shè)備EUI值注意:
- 示例中使用的是OTAA加網(wǎng)方式,所以選用的是"OTAA keys"相關(guān)參數(shù),根據(jù)實(shí)際選擇“OTAA”或“ABP”參數(shù)。
- Device EUI:在傳感器示例代碼中獲取,切記需要?jiǎng)h除各個(gè)數(shù)字前的“0x”以及“,”。
6、查看傳感器模塊日志以及RAK網(wǎng)關(guān)接收的上行數(shù)據(jù)。傳感器模塊日志:
- 網(wǎng)關(guān)內(nèi)置服務(wù)器側(cè)設(shè)置完成后,傳感器模塊將自動(dòng)加入網(wǎng)絡(luò)。
- 打開“工具>串口監(jiān)視器”,可以到如下信息,表示該WisBlock 傳感器模塊已入網(wǎng)成功,并開始上傳數(shù)據(jù)。
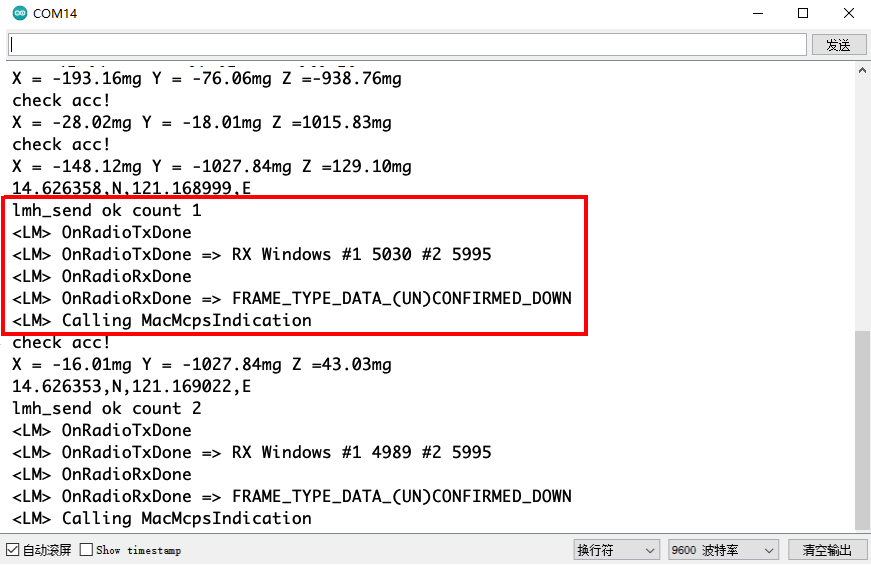 Figure 30: 傳感器模塊日志
Figure 30: 傳感器模塊日志網(wǎng)關(guān)中上行實(shí)時(shí)數(shù)據(jù):
- 進(jìn)入“LoRa Network > Application”。
- 單擊應(yīng)用的“Edit”操作,進(jìn)入應(yīng)用設(shè)備界面。
- 單擊所選設(shè)備的設(shè)備名稱或設(shè)備EUI鏈接,進(jìn)入設(shè)備詳情頁面。
- 單擊進(jìn)入“Live Device Data”頁面,可查看實(shí)時(shí)上行數(shù)據(jù)。
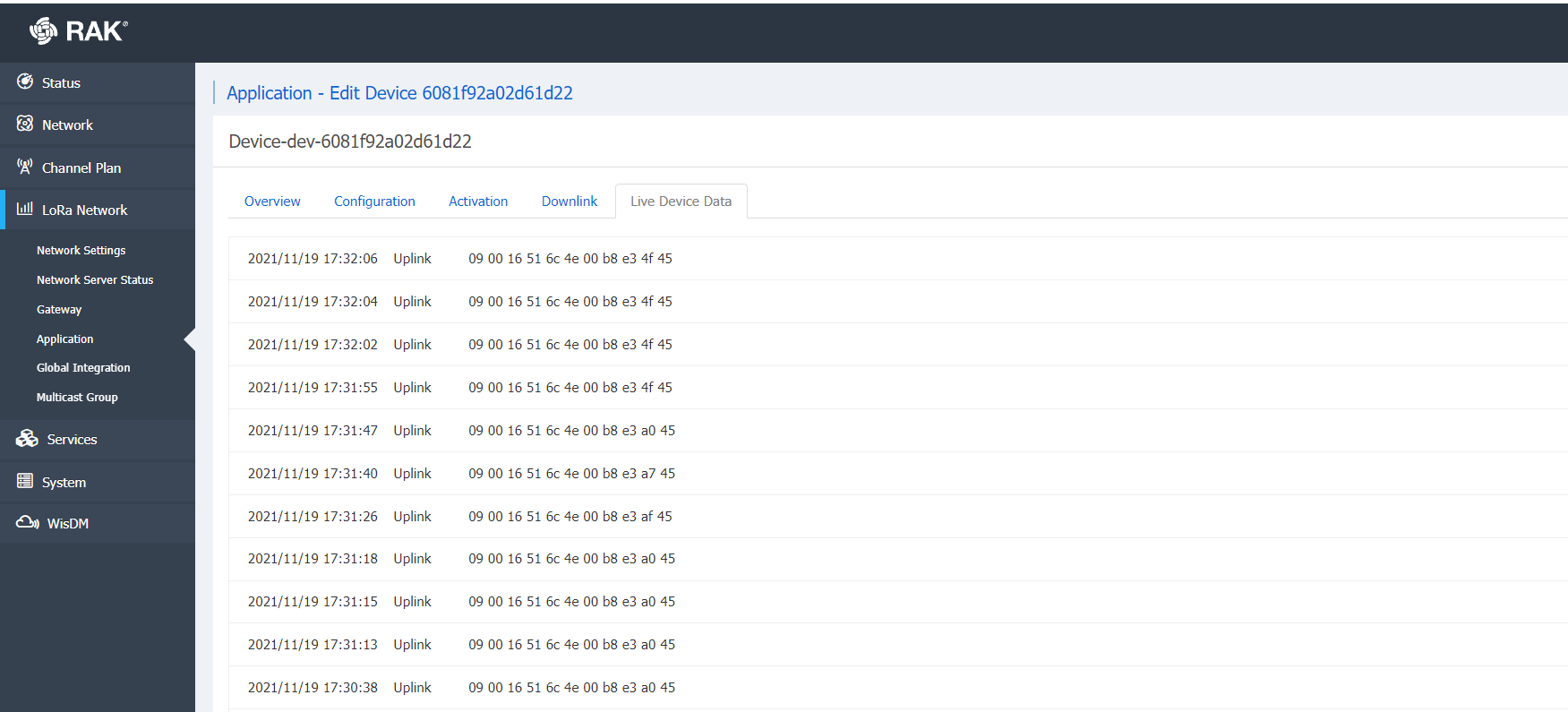 Figure 31: 網(wǎng)關(guān)接收的上行數(shù)據(jù)
Figure 31: 網(wǎng)關(guān)接收的上行數(shù)據(jù)注意:
- 如果即使您確定加速度計(jì)已經(jīng)在正確的觸發(fā)方向上也沒有GPS坐標(biāo)傳輸
if (abs(x - z) < 400),那么您需要檢查RAK1910 GPS模塊是否可以獲得GPS信號(hào)。請(qǐng)查看這個(gè)初始 RAK1910 快速測(cè)試。 - 在實(shí)例中,加速度計(jì)的檢查周期為 10 秒。在實(shí)際的 LoRaWAN 部署中,按照 LoRaWAN 區(qū)域參數(shù)規(guī)范中規(guī)定的規(guī)定,這應(yīng)該高得多。
#數(shù)據(jù)格式
發(fā)送到此示例代碼的 LoRaWan? 服務(wù)器的數(shù)據(jù)具有以下格式:
- Buffer[0] - 0x09(數(shù)據(jù)是 GPS 坐標(biāo)的標(biāo)頭指示符)。
- Buffer[1-4] - 以整數(shù)表示的緯度值。要獲得浮點(diǎn)數(shù)的實(shí)際緯度值,這個(gè)整數(shù)必須除以 10000。
- Buffer[5] - 它可以是與地理位置有關(guān)的“S”或“N”。
- Buffer[6-9] - 以整數(shù)表示的緯度值。要獲得浮點(diǎn)數(shù)的實(shí)際經(jīng)度值,這個(gè)整數(shù)必須除以 10000。
- Buffer[10] - 它可以是與地理位置有關(guān)的“E”或“W”。
如本實(shí)例中網(wǎng)關(guān)收到的數(shù)據(jù)為:09 00 16 51 6c 4e 00 b8 e3 4f 45。其中09為數(shù)據(jù)類型標(biāo)識(shí);0x00 0x16 0x51 0x6c為緯度值,0x4e為地理位置“N”,將該十六進(jìn)制數(shù)據(jù)換算成十進(jìn)制數(shù)據(jù)為 22.81108;0x00 0xb8 0xe3 0x4f 為經(jīng)度值,0x45為地理位置“E”,將該十六進(jìn)制數(shù)據(jù)換算成十進(jìn)制數(shù)據(jù)為184.22779 ,即監(jiān)測(cè)到的位置信息為(22° N, 184° E)。
-
gps
+關(guān)注
關(guān)注
22文章
2918瀏覽量
167294 -
GPS模塊
+關(guān)注
關(guān)注
0文章
89瀏覽量
16722 -
RAK
+關(guān)注
關(guān)注
0文章
48瀏覽量
2163
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
Made with KiCad(十三):LoRa-GPS 追蹤器

激光焊縫跟蹤器與傳統(tǒng)焊縫檢測(cè)方法的對(duì)比

深入解析激光焊縫跟蹤器的工作原理與應(yīng)用優(yōu)勢(shì)
TRKRLDOEVM-119通用跟蹤器LDO評(píng)估模塊

使用TMS320C40 DSP實(shí)現(xiàn)單脈沖雷達(dá)的數(shù)字跟蹤器

卡巴斯基稱谷歌網(wǎng)絡(luò)跟蹤器活躍量全球第一
用邏輯和翻譯用例優(yōu)化資產(chǎn)跟蹤器
創(chuàng)想智控激光焊縫跟蹤器協(xié)同專機(jī)在風(fēng)機(jī)高精度自動(dòng)焊接的應(yīng)用

光學(xué)跟蹤器接口連接方法有哪些
光學(xué)跟蹤器信號(hào)源手機(jī)怎么設(shè)置
光學(xué)跟蹤器使用的技術(shù)有哪幾種
創(chuàng)想智控激光焊縫跟蹤器在醫(yī)療攪拌罐反應(yīng)釜自動(dòng)焊接的應(yīng)用

創(chuàng)想智控激光焊縫跟蹤器在機(jī)械法蘭盤自動(dòng)掃描焊接的應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論