

實驗名稱:
實驗目的:
通過NI的多功能IO設備搭建基于LabVIEW的直驅閥閉環控制系統,試驗研究直驅閥的動態特性和穩態特性。
實驗設備:
信號發生器,功率放大器,音圈電機直驅閥,力傳感器,位移傳感器,位置調節器
實驗內容:
次利用數學模型和仿真軟件MATLAB-Simulink 設計直驅閥的閉環控制器,并分析系統的動態特性和穩態特性。
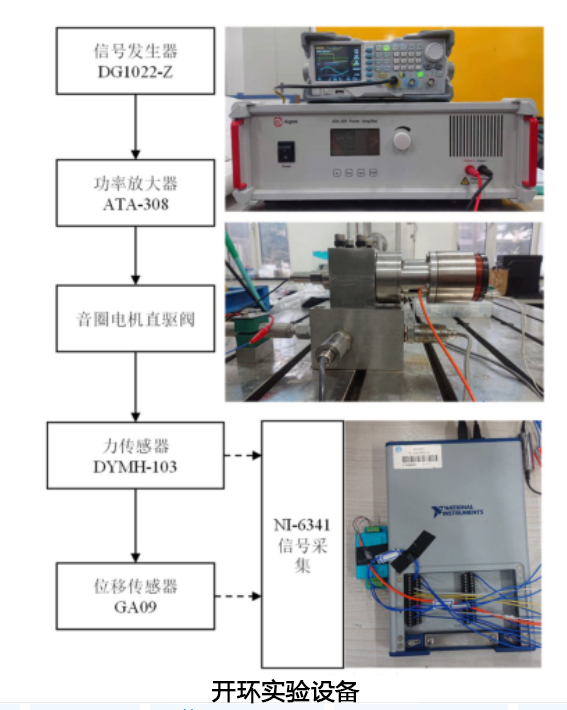
(1)音圈電機直驅水液壓閥的開環試驗
開環試驗主要是給定音圈電機不同階躍電壓,觀察閥芯位移的穩態值,然后與仿真穩態值做以比較,驗證模型的準確性或者理論模型與實際模型之間的差距。
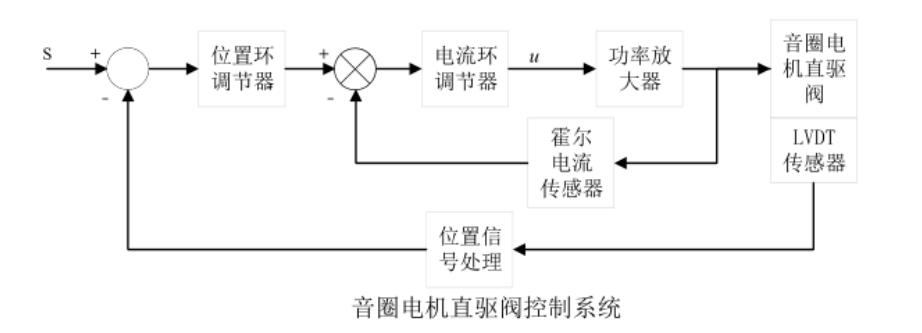
控制系統由位置環和電流環組成,以基于LabVIEW的NI 設備為核心,主要完成電流和位置閉環系統的數據采集和控制算法。充分利用LabVIEW豐富的IO功能,可對信號、穩定地進行檢測,便于控制控制系統的實現。
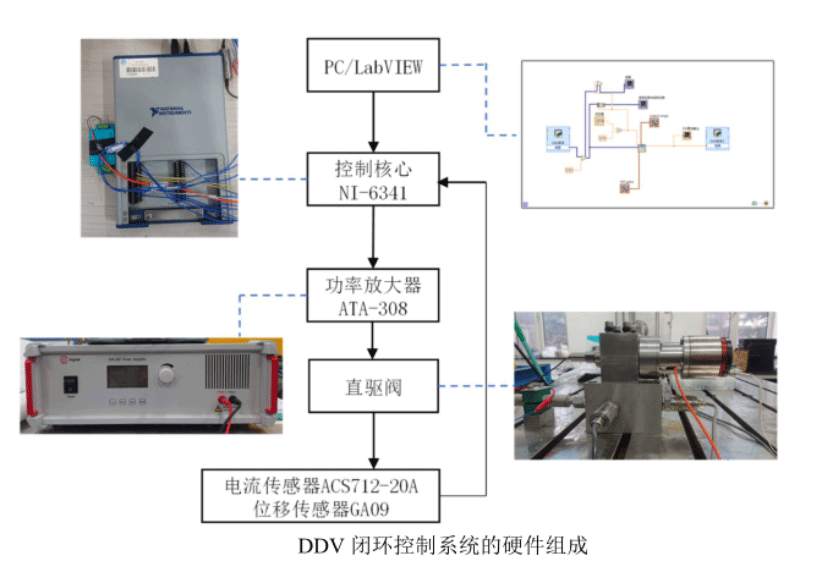
(3)基于LabVIEW的PID直驅閥控制試驗研究
音圈電機直驅閥的閉環PID 的實現方法是:在桌面端編寫LabVIEW控制程序,配合多功能IO設備NI-6341完成PID控制算法的實現、控制量的輸出和電流傳感器、位移傳感器反饋信號的采集;然后NI-6341將PID控制量給到線性功率放大器,完成控制信號到功率驅動信號的轉變,用以驅動音圈電機。
實驗結果:
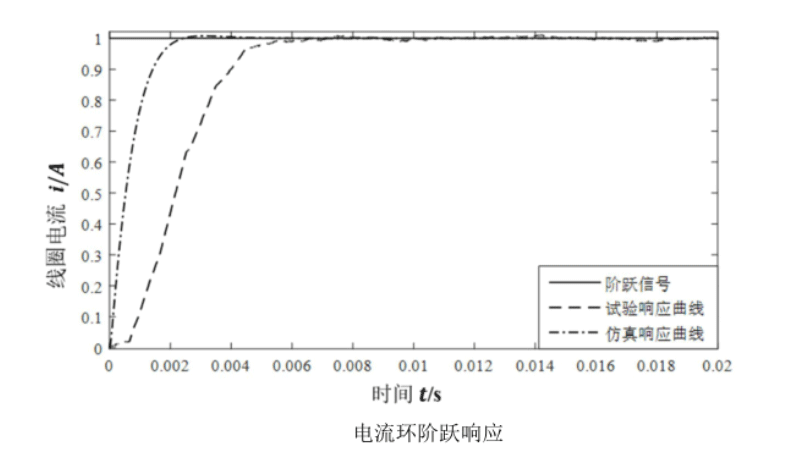
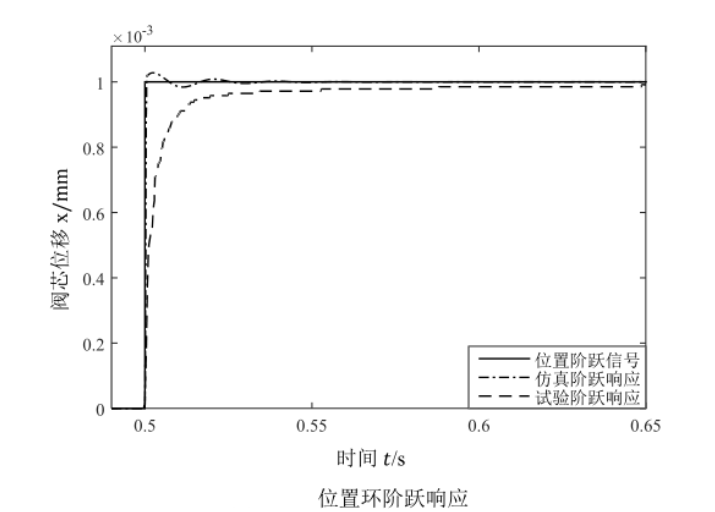
(1)試驗與仿真穩態數值對比如圖所示,由圖可以看出,仿真模型能較好地描述閥芯位移變化的趨勢,最大偏差約為閥芯總行程的5%;造成模型預測數據和試驗數據的偏差來源是:實際中復位彈簧在壓縮量為1~3mm之間時,其勁度系數分別為23N/mm、26.3N/mm、24.5N/mm,而仿真中彈簧的勁度系數設定為常數23N/mm。
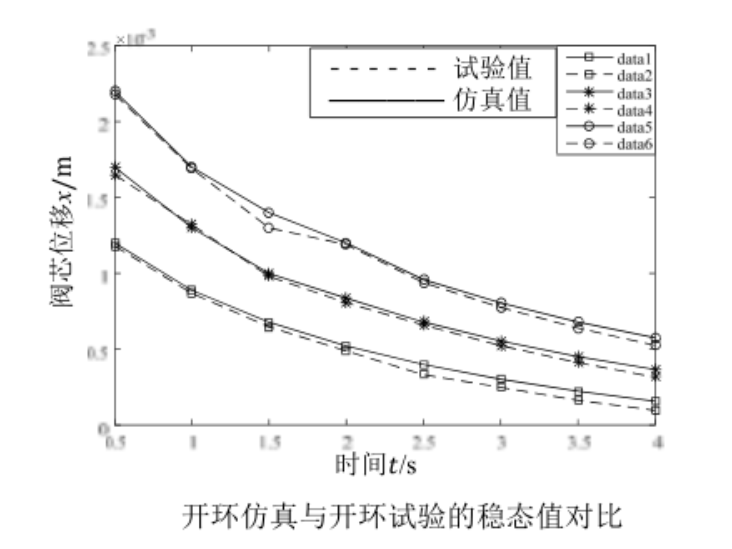
(2)由對比曲線可以看出,試驗中的階躍曲線在調整時間上有較大滯后,仿真中位移在上升階段很快,并且仿真響應結果比試驗結果的位移超調量更大。分析原因,偏差應該來源于水壓閥的泄漏造成的阻尼效應,以及仿真模型中未予考慮的封閉容腔中動態流量變化引起的阻尼效應,這兩個阻尼作用使直驅閥的整體動態響應不能像仿真中那樣好。
-
功率放大器
+關注
關注
102文章
3903瀏覽量
133720 -
電機驅動
+關注
關注
60文章
1290瀏覽量
87487
發布評論請先 登錄
安泰高功率放大器作用是什么意思



功率放大器的頻率響應特性

Aigtek功率放大器應用領域指南(功率放大器應用場景介紹)
安泰功率放大器在什么器件上使用

Aigtek功率放大器怎么選擇型號

Aigtek功率放大器的應用場景有什么

安泰功率放大器怎么使用
功率放大器在電磁系統中的應用

ATA-L8水聲功率放大器在超聲驅魚中的作用是什么







 工商網監
工商網監

評論