") 從高精度測量到檢測,性能選型豐富的3D激光輪廓傳感器你值得擁有
從高精度測量到檢測,性能選型豐富的3D激光輪廓傳感器你值得擁有
海康機器人3D激光輪廓傳感器基于激光三角測量原理,通過硬件內(nèi)置的高精度3D算法,實時輸出高幀率、微米級精度的點云數(shù)據(jù)、深度圖和亮度圖數(shù)據(jù),廣泛適用于3C、鋰電、汽配、光伏等行業(yè)中3D測量及檢測場景。
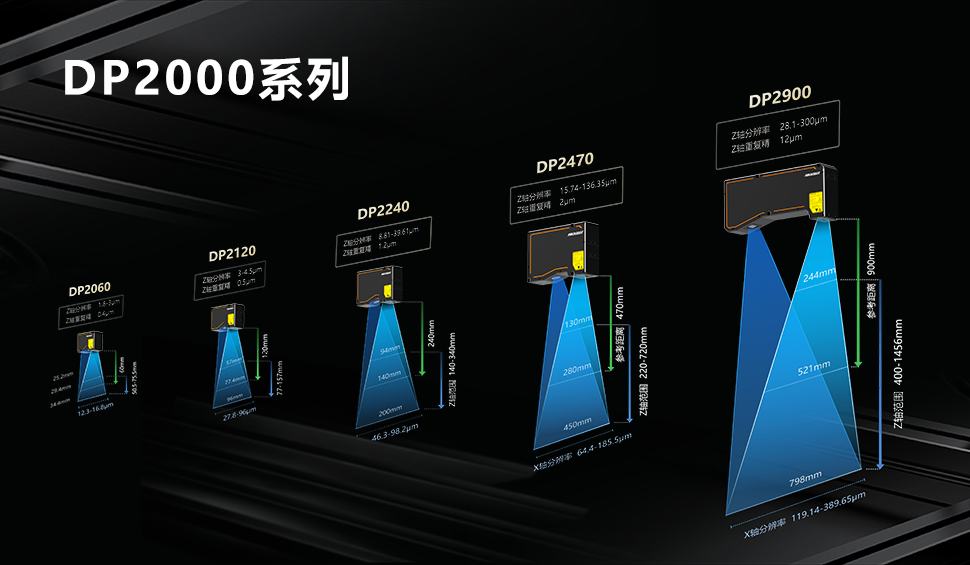
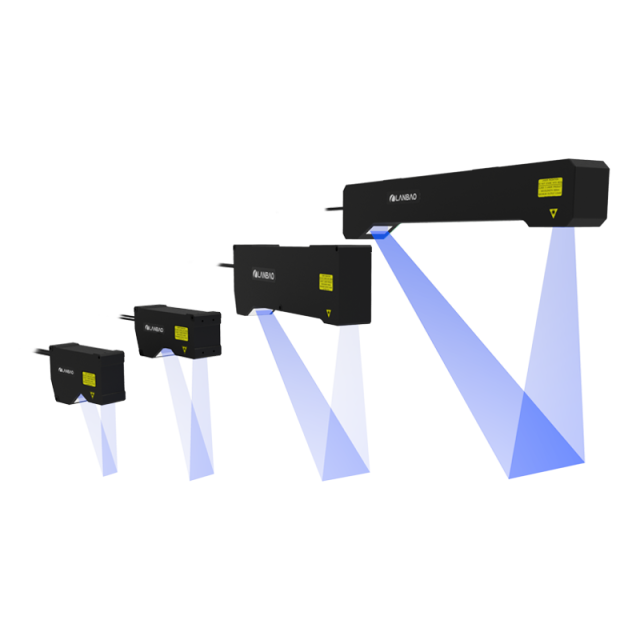
海康機器人3D激光輪廓傳感器目前已發(fā)布DP2000和DP3000兩大系列。其中DP2000推出五款型號,單輪廓點數(shù)為2048點,最高采集頻率達到10KHz,X軸測量范圍25.2-720mm,Z軸重復(fù)精度0.4-24um,線性度±0.01% of MR,且DP2240和DP2470支持紅藍光兩個版本選配。
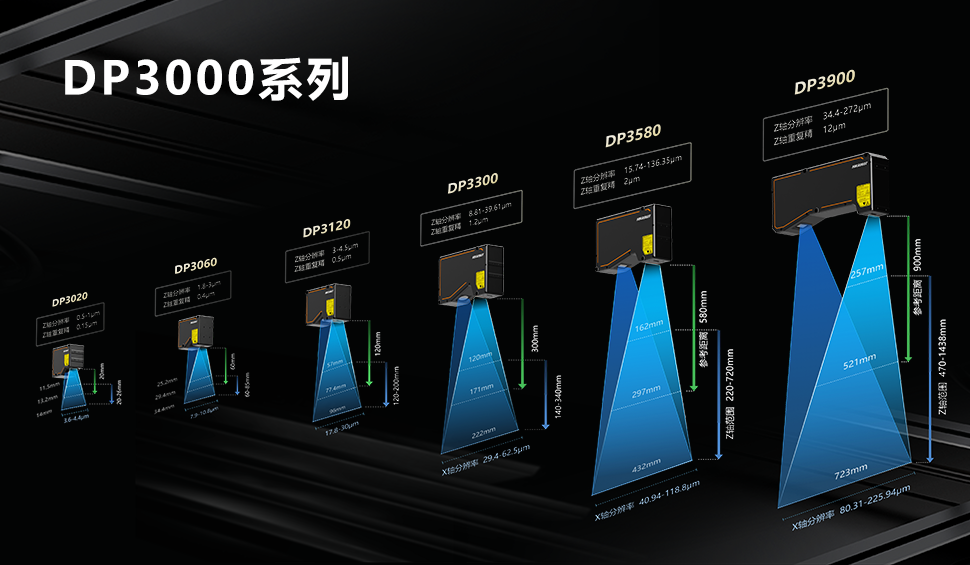
DP3000系列推出六款型號,輪廓點數(shù)升級為3200點,最高檢測頻率提升到19KHz,在超高精度測量方向,進一步擴充了DP3020型號,覆蓋11.5-14mm的X軸寬度,實現(xiàn)0.15um的Z軸重復(fù)精度,同時DP3300和DP3580兩個版本同樣支持紅藍光兩個版本選配。
強大的算法處理能力
■中心點提取
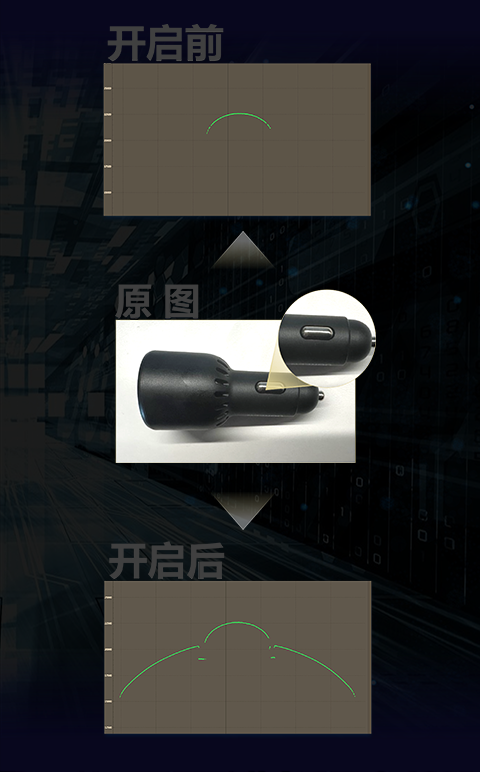
■超分辨率亞像素

高魯棒性的中心點提取算法使得傳感器可以精準提取輪廓線中線點,從而輕松應(yīng)對各種復(fù)雜場景

通過超分辨亞像素處理技術(shù),將提取精度提升至0.05像素,提升了傳感器的Z軸檢測精度
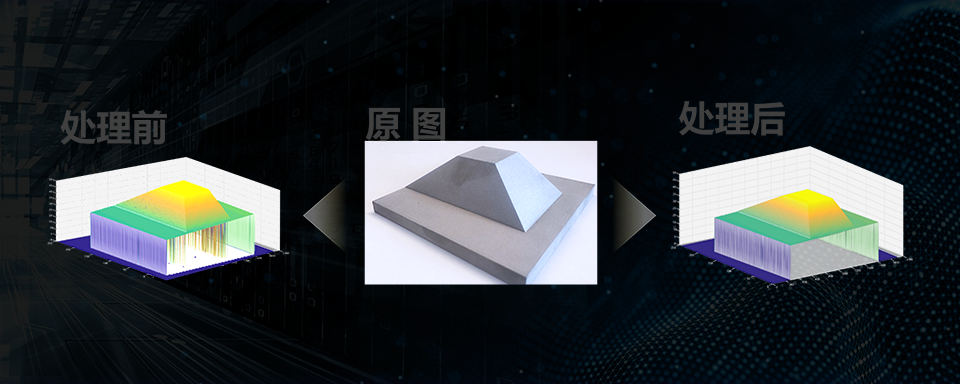
■HDR寬動態(tài)
■抗反光干擾
寬動態(tài)處理算法將不同曝光參數(shù)融合處理,讓傳感器可同時應(yīng)對高反光、高吸光材質(zhì)的輪廓提取
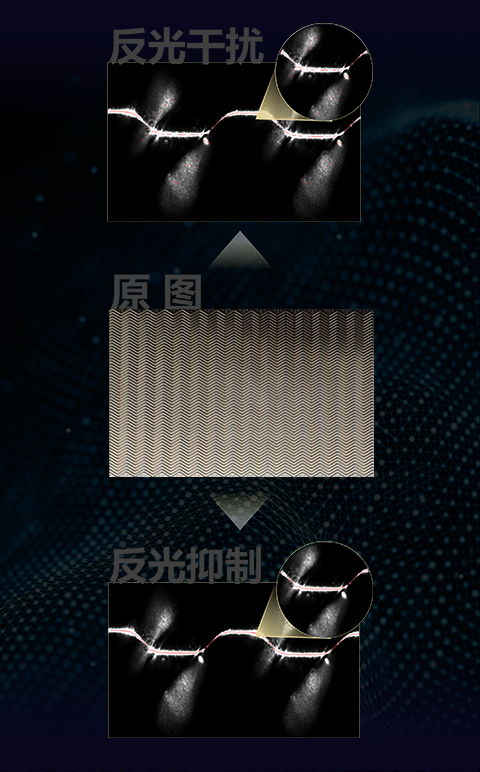
抗反光干擾算法有效降低金屬表面反光造成中心點提取錯誤的影響
■多模式后處理
在相機中內(nèi)置了豐富的后處理算法,包括空間濾波、時域濾波、空點填充、雙向插值、邊緣延拓等,方便客戶選用,并且不占用主機的CPU資源。
一鍵調(diào)試,快速部署
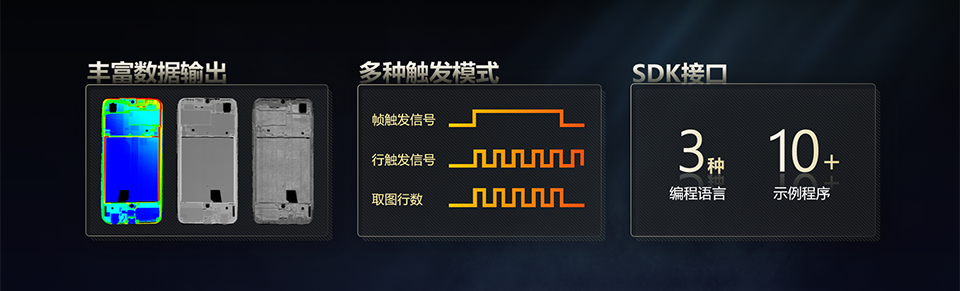
相機對外提供豐富的數(shù)據(jù)接口,包括輪廓數(shù)據(jù)、點云數(shù)據(jù)、深度圖、亮度圖。同時兼容多種觸發(fā)模式,支持差分編碼器觸發(fā)輸入,支持行觸發(fā)、幀觸發(fā),行+幀觸發(fā)的應(yīng)用模式。通過SDK集成激光輪廓傳感器到第三方軟件框架,提供C、C#、Python三種語言版本的SDK,包括主流視覺分析軟件在內(nèi)的10多種集成使用示例,便于用戶的二次開發(fā)。
■深度圖一鍵調(diào)試
■IO信號監(jiān)測
在配套的客戶端軟件中,簡化深度圖的調(diào)參過程,支持一鍵調(diào)試,并且提供IO信號監(jiān)測工具,便于項目現(xiàn)場快速調(diào)試和部署。 VM 3D算法平臺 VM 3D算法平臺是專門為3D高精度定位、測量、缺陷檢測設(shè)計開發(fā)的平臺級軟件,基于圖形化交互、流程式編輯和可視化配置的框架特性,為用戶提供功能豐富、操作便捷的軟件方案開發(fā)平臺。

軟件繼承了原有的2D視覺算法模塊,集成機器視覺多種算法組件,實現(xiàn)2D和3D視覺檢測方案的整合。
豐富行業(yè)應(yīng)用 海康機器人3D解決方案完整覆蓋鋰電中段工藝,其中包括極片入殼前極耳焊接缺陷檢測、入殼后頂蓋焊縫尺寸測量、頂蓋周邊焊接缺陷檢測、頂蓋平整度檢測、注液封口后密封釘缺陷檢測、六面檢等。
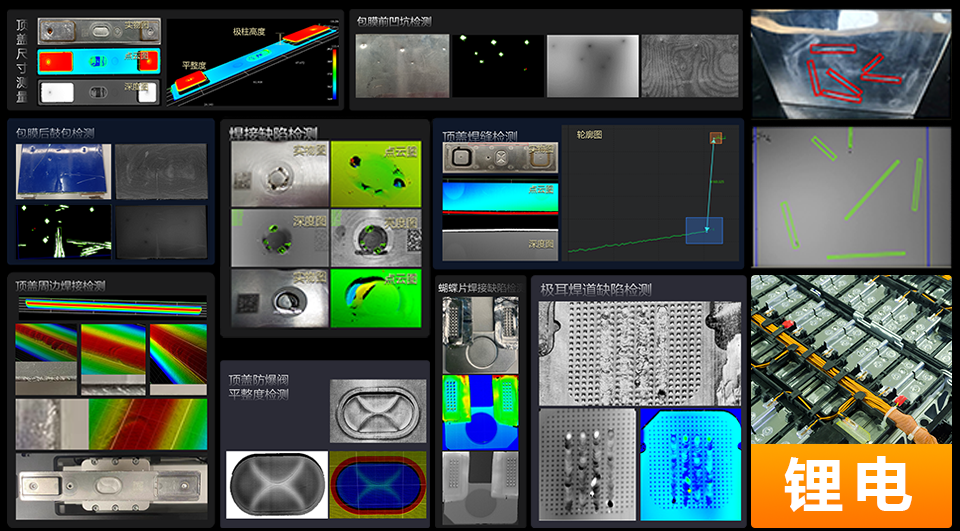
汽車零配件尺寸檢測應(yīng)用不斷追求精度和穩(wěn)定性,對于插針檢測的針腳排序問題以及密封圈檢測的形變問題,海康機器人在VM 3D中開發(fā)專用算子,降低了方案搭建的難度,提升了檢測的效率和效果。

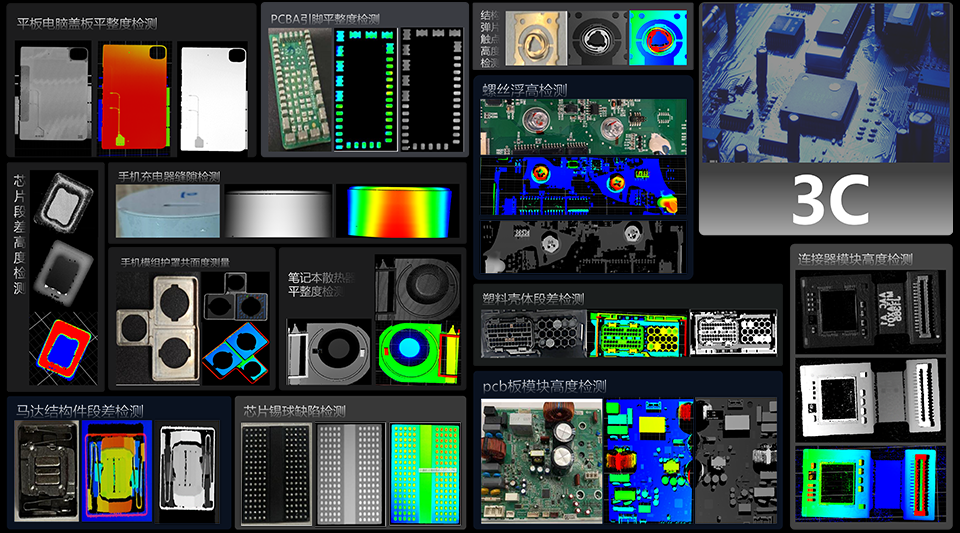
3C行業(yè)中,海康機器人3D解決方案主要應(yīng)用集中在消費類電子產(chǎn)品的平整度、共面度、縫隙寬度和段差尺寸測量。
-
高精度
+關(guān)注
關(guān)注
1文章
525瀏覽量
25450 -
3D激光
+關(guān)注
關(guān)注
0文章
30瀏覽量
7465 -
海康機器人
+關(guān)注
關(guān)注
1文章
28瀏覽量
5235
原文標題:從高精度測量到檢測,性能選型豐富的3D激光輪廓傳感器你值得擁有
文章出處:【微信號:im_robotic,微信公眾號:機器人在線訂閱號】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
3D線激光輪廓測量儀的關(guān)鍵參數(shù)——最大掃碼頻率
3D線激光輪廓測量儀安裝時的注意事項
行業(yè)知識 | CMOS激光位移傳感器如何實現(xiàn)高精度測量?

高精度位移傳感器檢測裝置,提高測量精度和檢測效率

3D案例 3D線激光輪廓測量儀手機中框檢測,為手機質(zhì)量上把鎖

光學(xué)3D表面輪廓儀:滿足多元超精密微觀尺寸測量需求

3D激光線掃輪廓傳感器在汽車行業(yè)的汽車車縫檢測的應(yīng)用
深視智能3D輪廓測量儀助力鼠標裝配質(zhì)量檢測,讓您暢玩《黑神話:悟空》

宜科LVM2540智能3D激光輪廓傳感器在螺絲檢測中的應(yīng)用
TMAG5170 具有 SPI 接口的高精度 3D 線性霍爾效應(yīng)傳感器數(shù)據(jù)表

TMAG5170D-Q1具有SPI接口的雙芯片高精度3D線性霍爾效應(yīng)傳感器數(shù)據(jù)表
微觀特征輪廓尺寸測量:光學(xué)3D輪廓儀、共焦顯微鏡與臺階儀的應(yīng)用
Micro-Epsilon擴展了其高精度3D快照傳感器SurfaceCONTROL系列
泰來三維| 高精度工業(yè)3D掃描助力模具檢測和逆向設(shè)計“數(shù)字化”發(fā)展






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論