 基于RT-Thread的開源自駕儀FMT正式版v1.0.0即將發布!
基于RT-Thread的開源自駕儀FMT正式版v1.0.0即將發布!
FMT(全稱Firmament Autopilot)是首個基于模型設計的開源自駕儀系統。自2016年立項以來的近七年的時間里,FMT持續完善,經過了數千次Commit。
現在,FMT正式版v1.0.0馬上就要發布了!
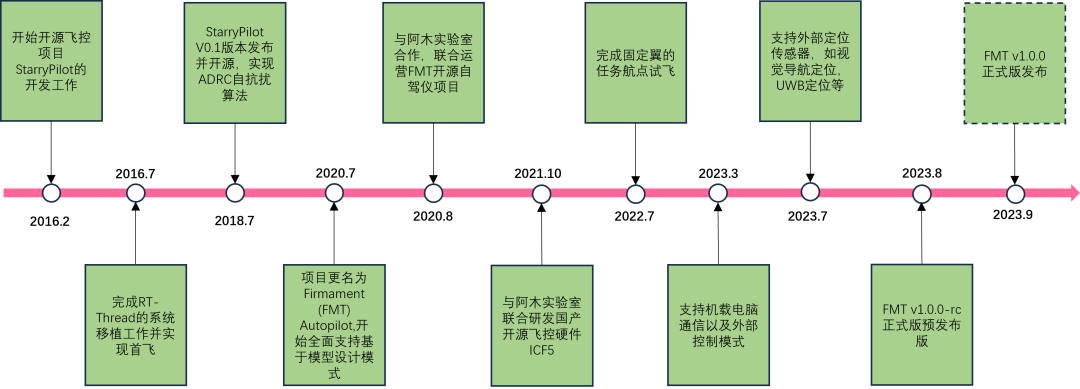 FMT開源項目重要時間節點
FMT開源項目重要時間節點
什么是 FMT?
Firmament (FMT) 是一款基于模型設計 (Model Based Design, MBD) 的開源自駕儀,可被用來快速構建無人機,車,船,機器人等的無人控制系統。基于模型設計已經被廣泛應用于汽車制造、航空航天等行業,當前采用基于模型設計模式開發的飛控系統鳳毛麟角,而 FMT 就是為此而誕生。FMT結合當前最先進的基于模型設計和3D仿真技術,構建了從嵌入式軟件,建模與仿真三位一體的軟件開發平臺,致力于打造下一代的開源自駕儀系統。
FMT支持開源硬件平臺
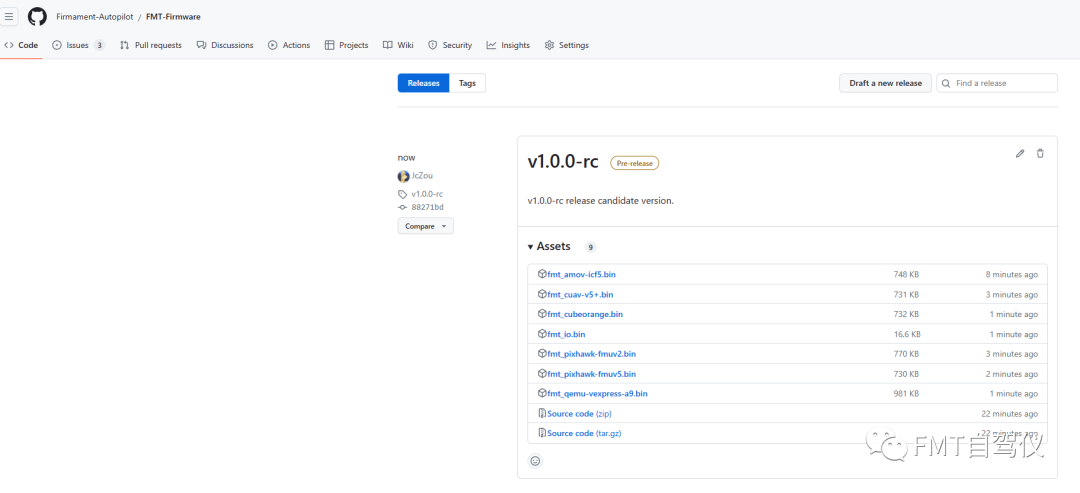
在正式版發布之前,我們將先上線包含了正式版全部功能的候選版本v1.0.0-rc,方便大家了解和學習的同時,我們也希望更多的開發者參與測試。我們也將基于候選版本進行大量測試,同時我們也將根據測試結果和開發者們的反饋對候選版本進行最后的優化。
FMT作為一個年輕的開源項目,有了開發者們的鼎力支持才能更快成長。候選版本的測試過程預計將持續1個月,請開發者們多多使用和測試FMT,并歡迎提交反饋、issue、PR以及其他任何建議,我們會及時進行處理。
對于貢獻突出的開發者我們將提供一個月的免費技術支持和技術咨詢服務。
正式版亮點功能
- 數千小時飛行驗證,高安全、高穩定的自駕儀系統。
- 更高效,更低的CPU使用率以及內存使用率,預留更大算力和內存空間。
- 高實時,微秒級硬實時響應,保證算法和模塊實時性要求。
- 強大的日志系統,具備“黑匣子”功能,支持數據回溯和數據還原。
- 基于發布/訂閱模式的跨線程通信組件。
- 分布式參數系統,提供強大的參數管理功能。
- 支持MavLink協議和開源地面站QGroundControl。
- 支持基于模型設計(MBD)全流程先進開發模式,Matlab/Simulink圖形化算法建模,讓研發更高效。
- 支持Matlab/Simulink代碼自動生成,簡化算法開發流程。
- 支持跨平臺開發,Win/Linux/Mac全平臺支持。
- 支持多個開源飛控硬件平臺,包括國產平臺ICF5,以及Pixhawk標準硬件。
- 工業級算法模型,包括導航系統(INS),飛行管理系統(FMS),控制系統(Controller),被控對象模型(Plant)。
- 自適應抗擾動算法,可抗外界擾動和磁干擾。
- 支持完善的安全機制,控制模式降級保護,失聯自動返航,遙控斷聯保護,失控安全降落等。
- 支持姿態、定高,定點等常用控制模式,支持任務航點、板外控制等高級控制模式。
- 支持一鍵起飛,降落,懸停,盤旋,返航,指點飛行等功能。
- 支持ROS1/ROS2通信接口,可基于ROS開發應用。
- 支持Offboard板外控制功能,可用于軌跡規劃和自主避障。
- 支持外部定位傳感器,包括但不限于UWB,VINS,動捕系統等。
- 支持多種仿真模式,如模型在環仿真(MIL),數據仿真,軟件在環仿真(SIL),硬件在環仿真(HIL),純硬件仿真(SIH)等。
- 支持AirSim,Gazebo,FlightGear等3D場景可視化。
- 支持多旋翼,固定翼平臺,可擴展其他平臺,如VTOL,直升機,無人車,無人船,飛艇,潛艇,機器人等。
- 可提供到手飛整機多旋翼和固定翼飛行平臺。
- 軟件和算法全開源,可用于教學,科研,商業等用途。
- 完善的文檔和相關教程。
獲取候選版本代碼的方法
FMT相關代碼托管在Github上,可以點擊閱讀原文進行跳轉。
也可以在項目的Release頁面下載編譯好的固件。
固件下載完成后,在飛控控制臺輸入boot_log應該能看到FMT的版本顯示為v1.0.0-rc。
_______
/__(_)___________________//_
/_///__/'/_`/'/-_)_/__/
/_//_/_//_/_/_/_,_/_/_/_/__/_//_/__/
Firmware..................FMTFWv1.0.0-rc
Kernel....................RT-Threadv4.0.3
RAM.................................448KB
Target...........................Amov-ICF5
Vehicle........................Multicopter
Airframe.................................1
INSModel..................BaseINSv1.0.0
FMSModel..................BaseFMSv1.0.0
ControlModel.......BaseControllerv1.0.0
TaskInitialize:
mavobc................................OK
mavgcs................................OK
logger................................OK
status................................OK
vehicle...............................OK
提交測試反饋
大家在測試和使用中若發現任何問題,可以通過Github提交Issue或者PR。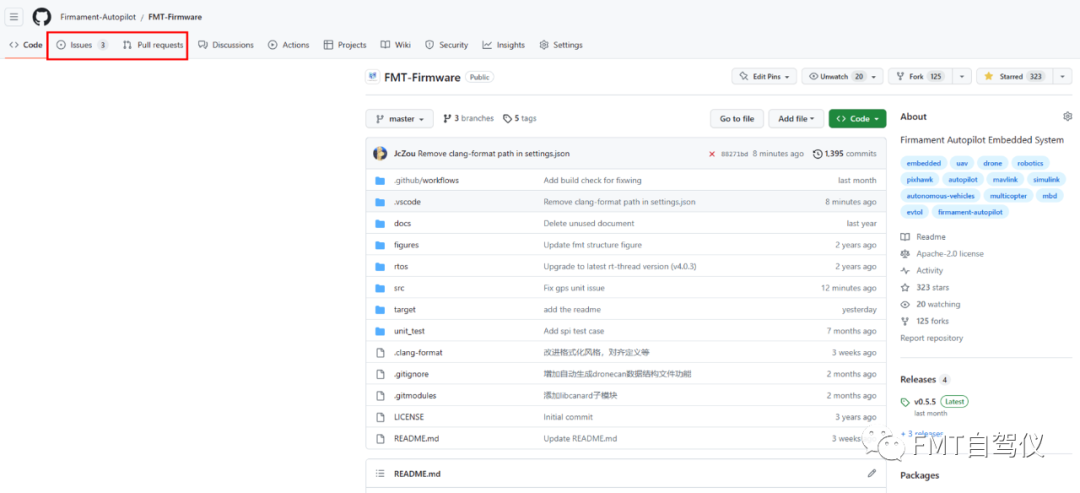
https://firmament-autopilot.github.io/FMT-DOCS/#/
若因網絡原因無法打開文檔,可以使用離線閱讀方式,具體請參考《FMT文檔離線閱讀》。
———————End———————
點擊閱讀原文進入官網
-
RT-Thread
+關注
關注
31文章
1285瀏覽量
40094
原文標題:基于RT-Thread的開源自駕儀FMT正式版v1.0.0即將發布!
文章出處:【微信號:RTThread,微信公眾號:RTThread物聯網操作系統】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
從開源中來到開源中去-RT-Thread北京社區篇

RT-Thread上CAN實踐
開源共生 商業共贏 | RT-Thread 2024開發者大會報名啟動!
睿賽德科技正式推出RT-Thread開源 4+服務,助力企業用戶發展
2024 RT-Thread全球巡回 線下培訓火熱來襲!
RT-Thread 新里程碑達成——GitHub Star 破萬!
6月6日杭州站RT-Thread線下workshop,探索RT-Thread混合部署新模式!
2024 RT-Thread 全球技術大會演講議程發布!
新書發布——《實時操作系統應用技術:RT-Thread與ARM編程實踐》
4月25日北京站RT-Thread線下workshop,探索RT-Thread混合部署新模式
先楫半導體攜手OpenHarmony正式發布HPMicro ohos v1.0.0
4月10日深圳場RT-Thread線下workshop,探索RT-Thread混合部署新模式!

4月10日深圳場RT-Thread線下workshop,探索RT-Thread混合部署新模式!






 工商網監
工商網監
評論