") 圖文| 12種橋式電路詳解,電路圖+工作原理
圖文| 12種橋式電路詳解,電路圖+工作原理
今天給大家介紹的是:12種橋式電路,附加電路圖和工作原理。
橋式電路是一種常見電路,其中2個電路支路(通常彼此關聯(lián))通過在前2個支路的某個中間點處連接在前2個支路之間的第三支路”橋接“。
一、H橋電路
非常簡單的橋式電路為H橋電路,具體的如下所示,圖中間的導電路徑,R2 兩端的電壓等于 R4 兩端的電壓,R1 兩端的電壓等于 R3 處的電壓,與四個電阻的電阻值無關。
如果兩個分支之間沒有電橋,中點的電位取決于電阻值的比率。如果 R1 :R2 等于 R3 : R4 ,即使沒有電橋,電勢差也為零。
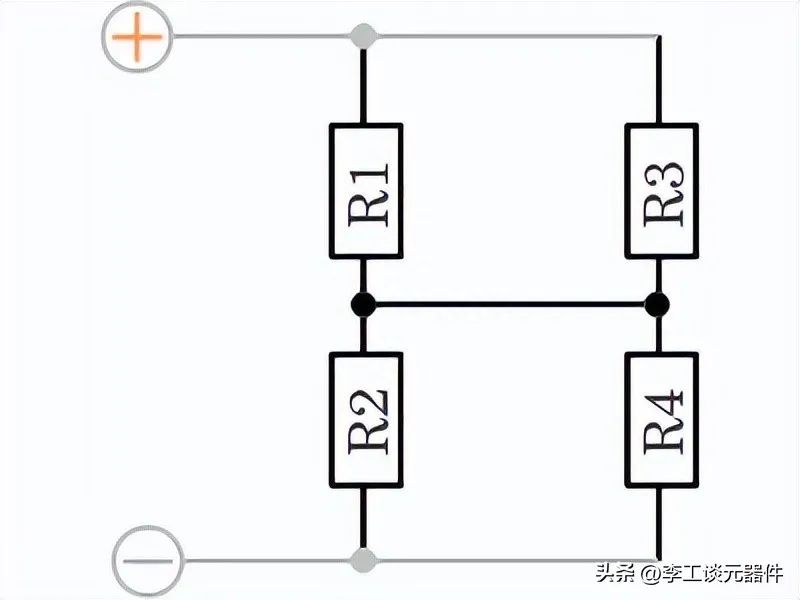
H橋電路
二、惠斯通電橋
惠斯通電橋用于平衡H電橋的2條橋臂來測來位置電阻。
兩個恒定電阻(R1和R3)電位計和未知電阻形成電路的2條支路,并通過電壓表或者電流表橋接。只要左側的電路之比等于右側的電阻,電橋兩點之間的電路以及流過路徑的電流就為0。當使用電壓表時,改變電位計直到2個中點之間的電壓降為0。
而當使用電流表時,則沒有電流流過儀器。電位器滑動觸點的位置與未知電阻的阻值之間存在線性關系。因此可以校準電位器的刻度,便于讀取未知電阻的阻值。
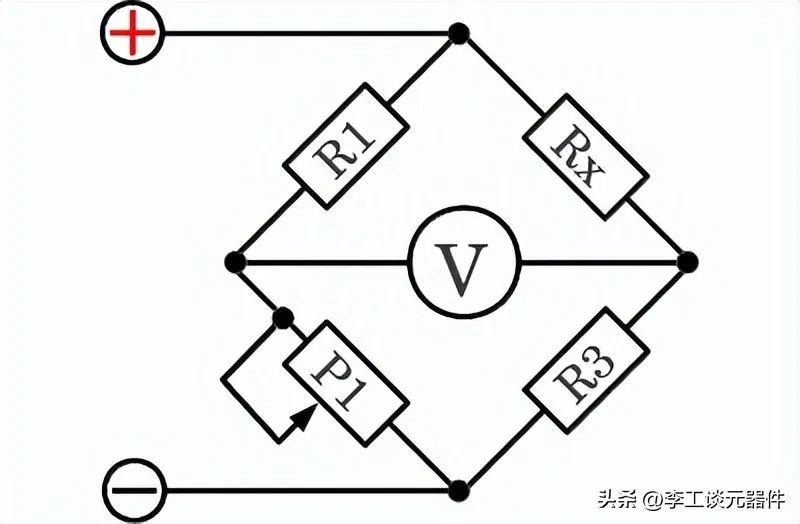
惠斯通電橋
三、2個電位器組成的H橋
2個電位器組成的H橋可以將+VIn和 -VIn之間的任何電壓施加到連接在兩個電位器之間的負載。
雖然電位器適合手動調節(jié)低功率設備的電壓,但晶體管甚至可以通過幾乎任何電子電路來控制高功率設備。
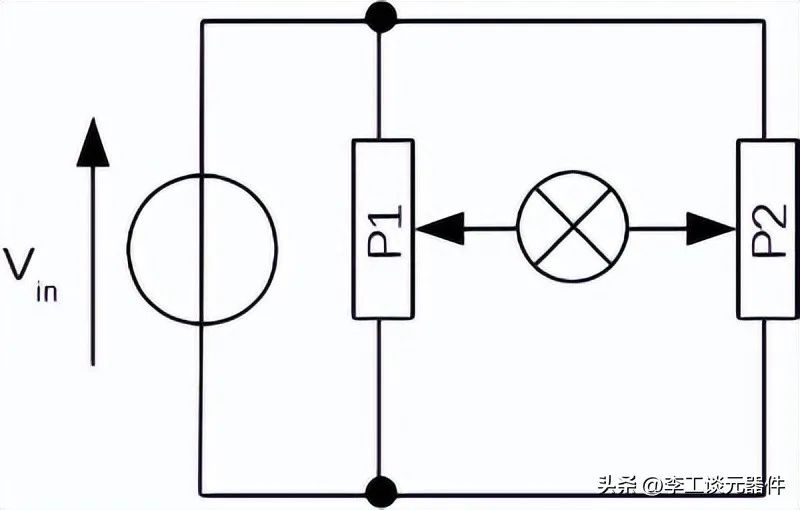
2個電位器組成的H橋
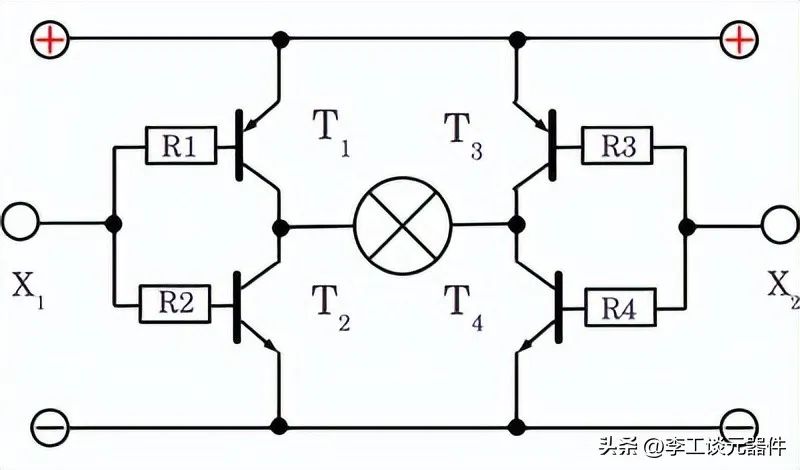
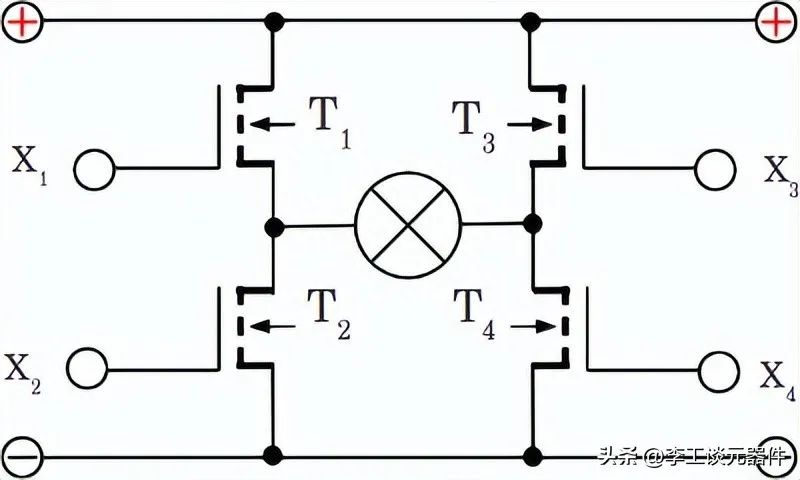
四、由兩個NPN和兩個PNP晶體管組成的H橋
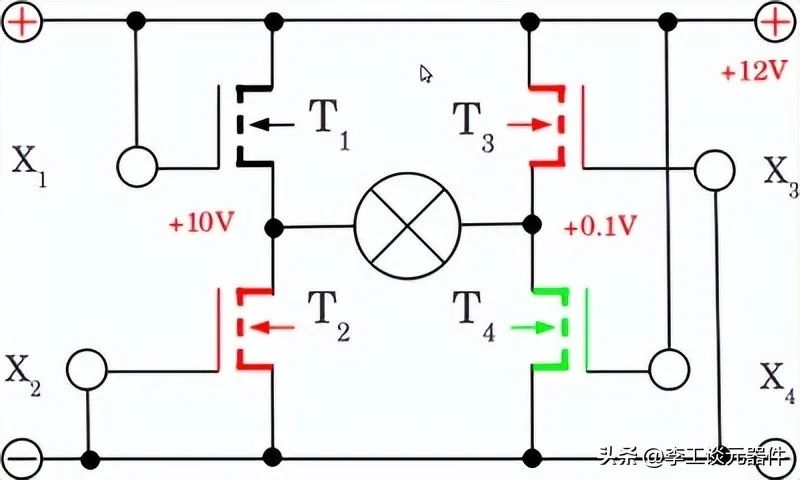
由兩個NPN和兩個PNP晶體管組成的H橋,下部NPN晶體管的電阻不斷減小,而接地(=負端子)與X2和X4之間的電位不斷增加。如果輸入鉗位處的電勢等于電路的輸入電壓,則電阻最小。連接到基極引腳的串聯(lián)電阻限制基極電流。
相反,當?shù)嘏cX1和X3之間的電位為0V時,PNP晶體管的電阻最小,而如果輸入鉗位的電位等于輸入電壓,則PNP晶體管的電阻最大。
T2和T4被稱為低側晶體管,而T1和T3被稱為高側晶體管。
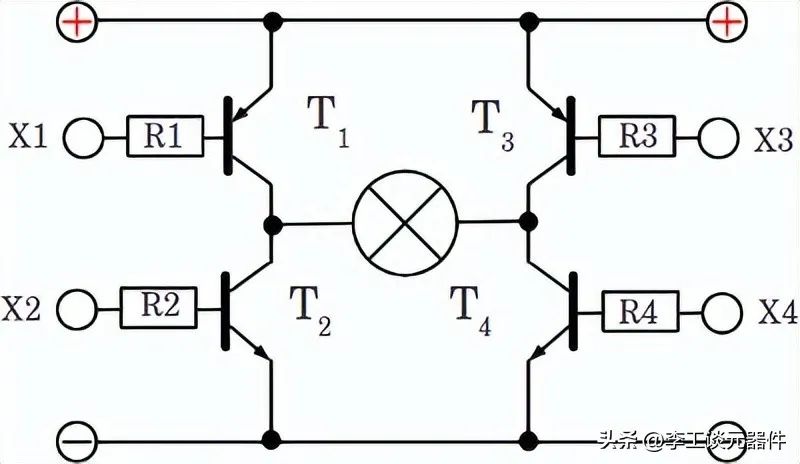
由兩個NPN和兩個PNP晶體管組成的H橋
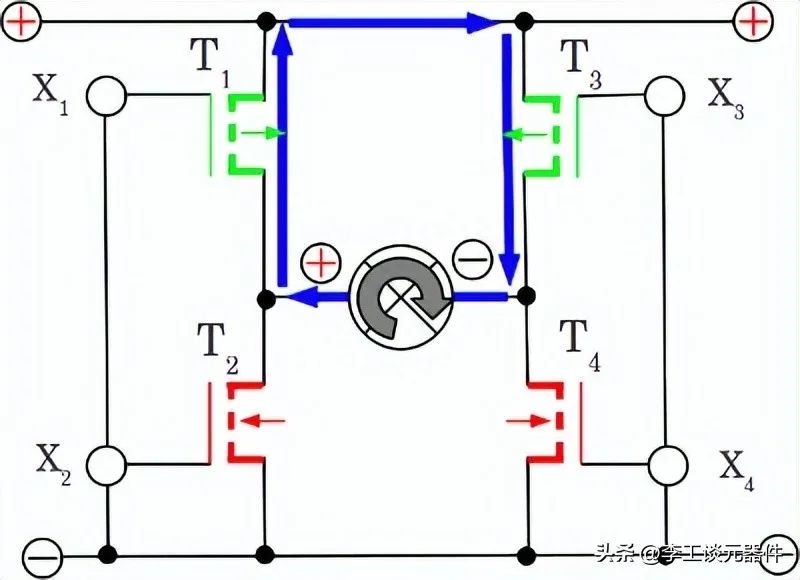
1、X1和X2分別接地, X3和X4連接到正電源電壓
當X1和X2分別接地,將 X3和X4連接到正電源電壓時,T2和T3的電阻處于最大值,而T1和T4的電阻處于最小值。
結果電路左側中點的電位幾乎等于電源電壓,而右側中點的電位幾乎為0。電流從正極經(jīng)過T1從左向右流經(jīng)負載,最后流經(jīng)T4到電壓源的負極端子,正極端子位于負載的左側。
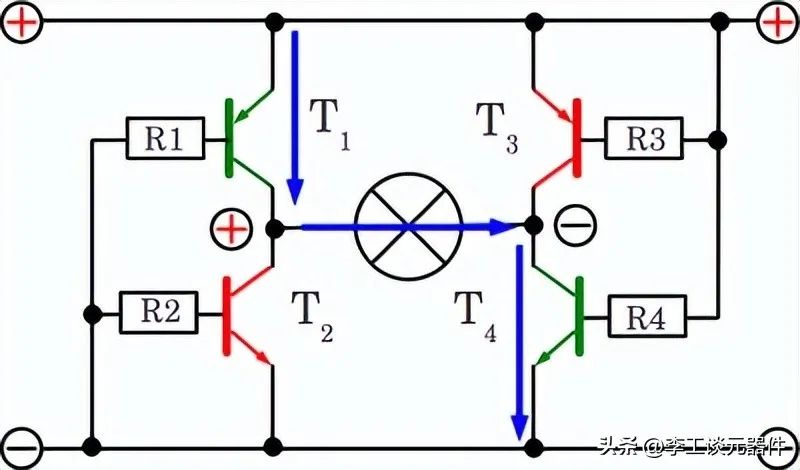
X1和X2分別接地, X3和X4連接到正電源電壓
2、X1和X2連接到正電源電壓,同時X3和X4連接到地
如果X1和X2連接到正電源電壓,同時X3和X4連接到地,情況會發(fā)生變化。現(xiàn)在正極端子位于負載的右側,電流分別流過T3和T2。
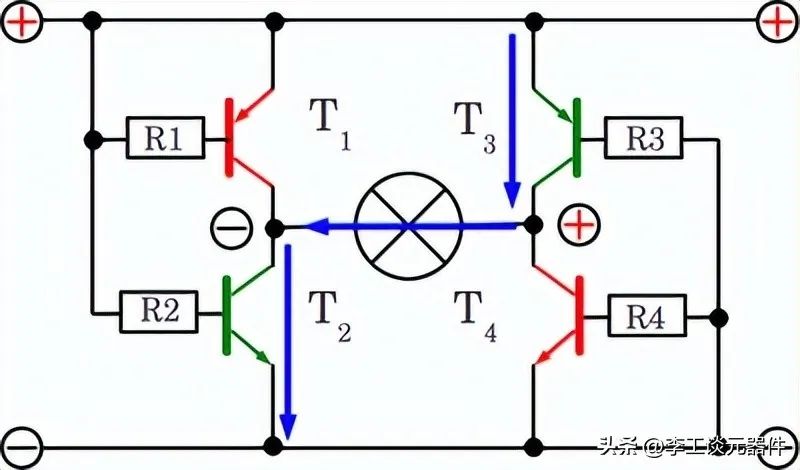
X1和X2連接到正電源電壓,同時X3和X4連接到地
3、4個輸入鉗位連接到地
將所有4個輸入鉗位連接到地時,上方的PNP晶體管導通,而下方的NPN晶體管關閉。負載2個鉗位處的電位幾乎等于正電源電壓,因為沒有電流流過負載。
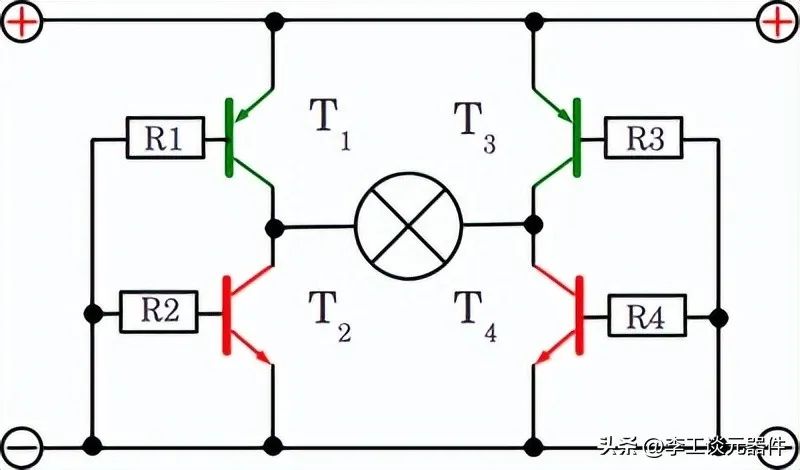
4個輸入鉗位連接到地
4、4個輸入鉗位連接到電源電壓的正極端子
將所有4個輸入鉗位連接到電源電壓的正極端子時,上方的PNP晶體管關斷,而下方的NPN晶體管導通,負載兩個鉗位處的電位幾乎等于負電源電壓,因此也沒有電流流過負載。
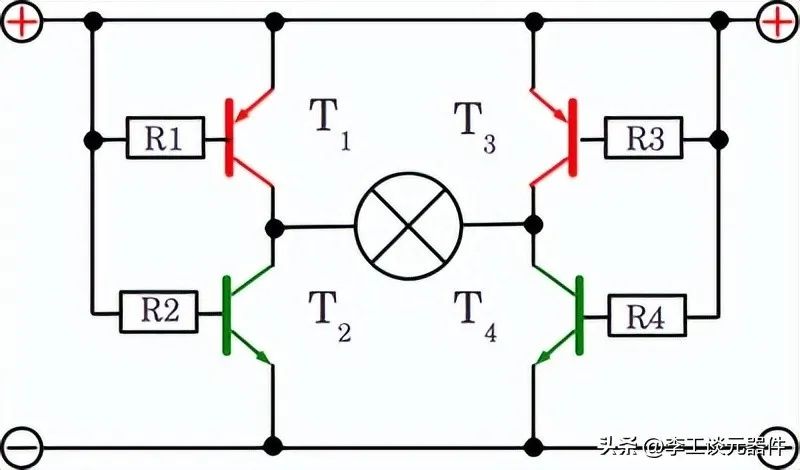
4個輸入鉗位連接到電源電壓的正極端子
5、通常只有2個輸入鉗位
2個輸入鉗位
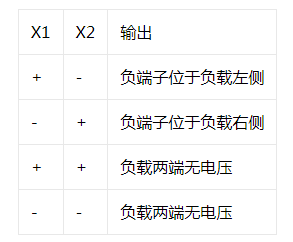
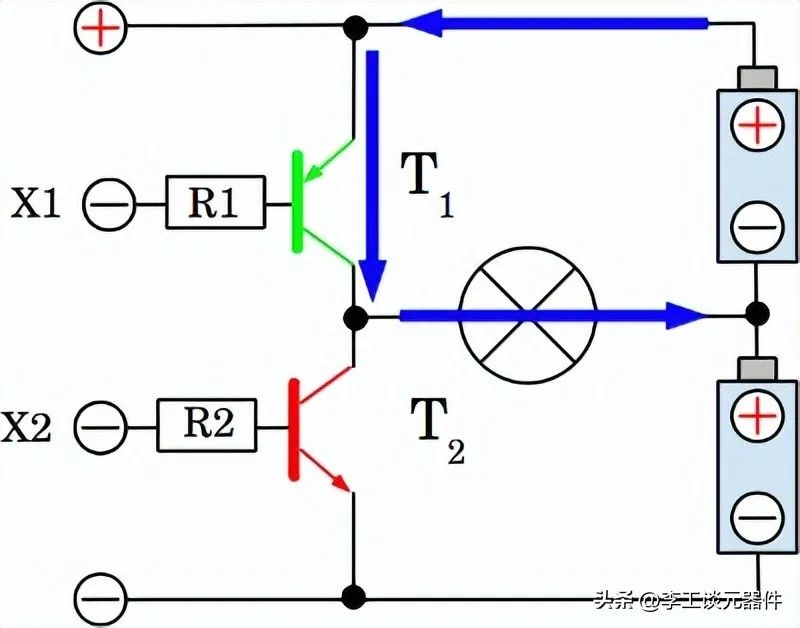
五、半橋H橋電路
由4個晶體管組成的H橋電路稱為全橋。因此由2個晶體管組成的H橋電路為半橋。對于分離電源,半橋就可以控制交流負載,下圖種使用了2節(jié)電池。
半橋H橋電路
1、2個晶體管的基極引腳通過串聯(lián)連接到正極端子
如果2個晶體管的基極引腳通過串聯(lián)連接到正極端子,因此輸入端有一個高信號,上方的PNP類型將關閉,而下方的NPN類型將打開。電流從下部電池的正極端子流出,從右向左流過負載,并通過晶體管T2在負極端子處重新進入電池。
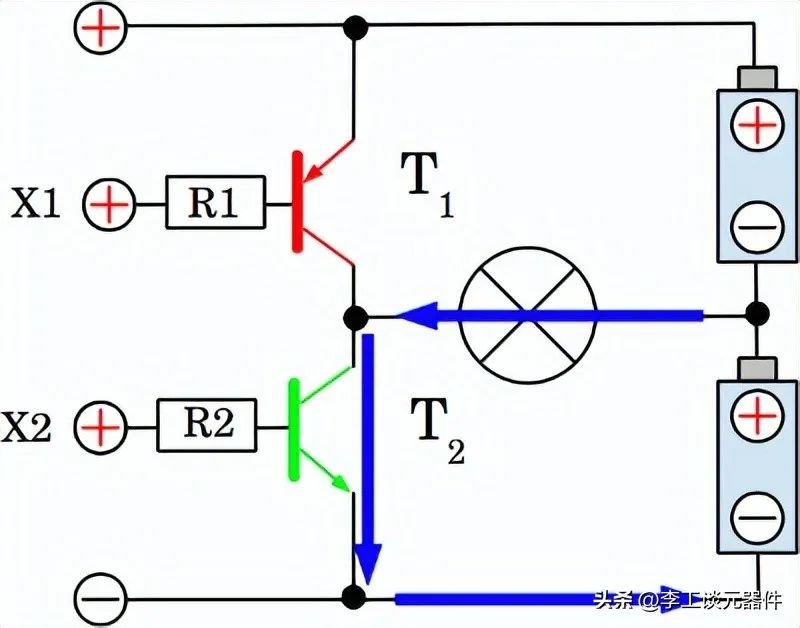
2個晶體管的基極引腳通過串聯(lián)連接到正極端子
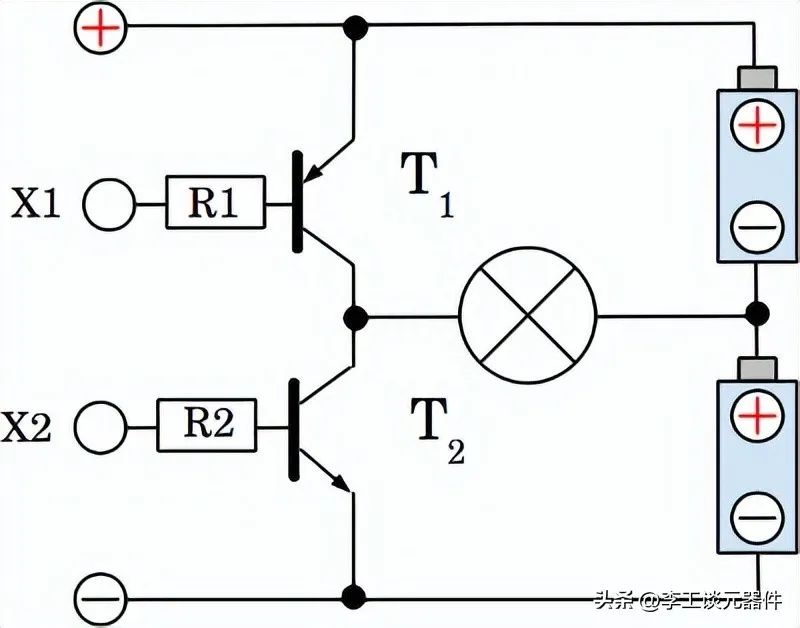
2、半橋的2個輸入連接到負端子
如果半橋的兩個輸入都連接到負端子,則上方的NPN類型將打開,下方的NPN類型將關閉。電流從上部電池的正極端子流過晶體管T1,現(xiàn)在從左向右流過負載,然后返回電池的負極端子。使用半橋的優(yōu)點時所需晶體管數(shù)量少,缺點是電源更復雜。
半橋的2個輸入連接到負端子
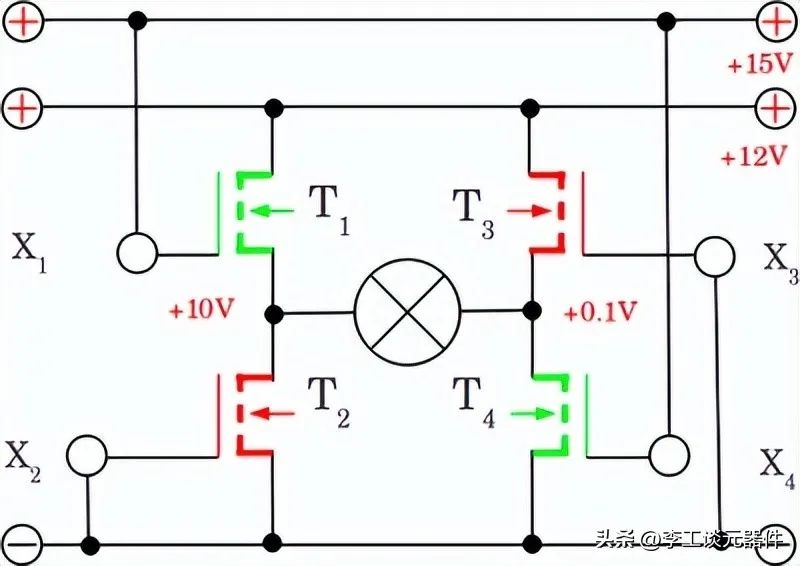
六、MOS管組成的H橋電路
當使用MOS管組成H橋時,必須考慮使晶體管進入飽和模式所需的基極電流。R1-R4的尺寸取決于電源電壓。當電路的輸入電壓為12V而不是6V時,電阻值必須要加倍。如果電阻值適用較高的電壓,則電阻消耗的功率也會加倍,否則會增加4倍,因此必須要牢記最大功耗。
使用N溝道和P溝道MOS管代替NPN或PNP類型也有一些好處。
僅需要兩個上拉或下拉電阻,并且 R1 和 R2 的值并不重要,只需使用相對較高的值即可避免在接近最大功耗的情況下工作。
電路的最小輸入電壓受到可靠“導通”MOS管所需的源極柵極電壓的影響(必須略高于閾值電壓 V GS(th))。
最大輸入電壓應明顯低于最大源極柵極電壓,以避免在極限下運行。切換感性負載時請記住電壓峰值。
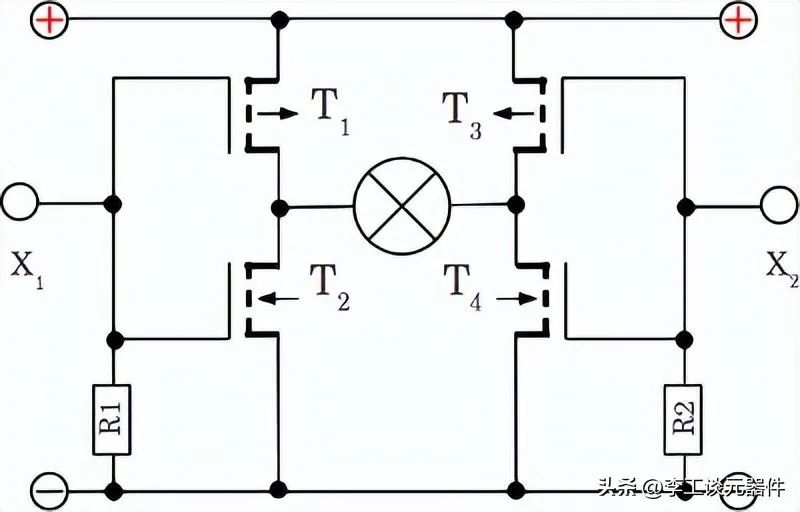
MOS管組成的H橋電路
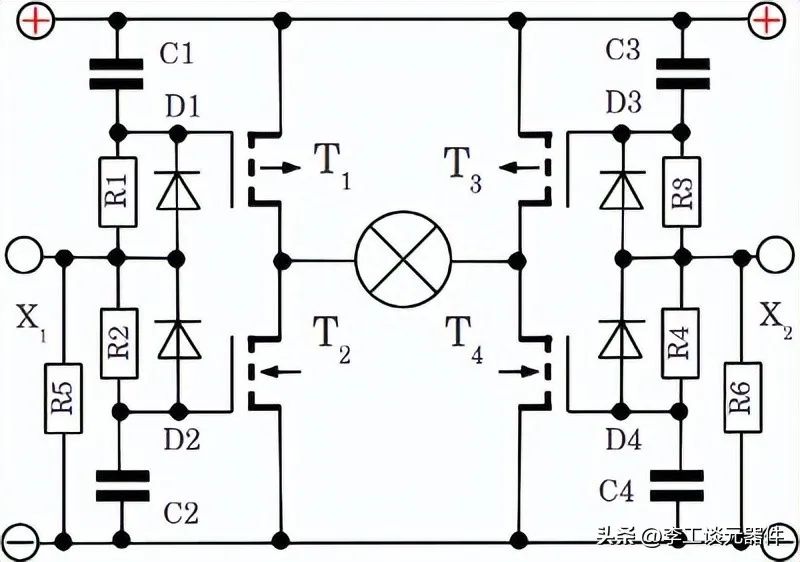
如果電源電壓超過MOS管的最大源極柵極電壓,則應插入4個分壓器,每個分壓器由齊納二極管和恒定電阻組成。齊納電壓必須大于導通晶體管所需的閾值電壓。
現(xiàn)在,最大源極漏極電壓通常明顯高于最大源極柵極電壓,限制了電路的輸入電壓。
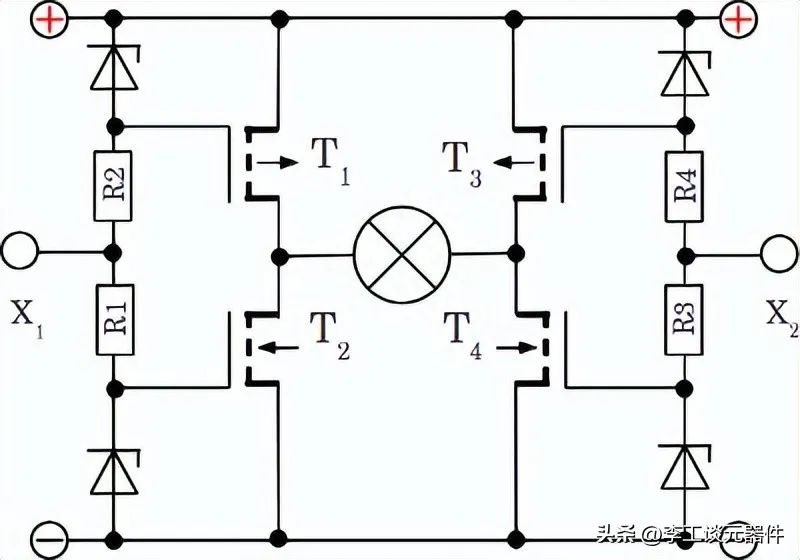
如果電源電壓超過MOS管的最大源極柵極電壓,則應插入4個分壓器
鉗位器必須始終連接到正電源電壓或者負電源電壓。如果X1連接到正電源電壓,而X2僅連接一半電源電壓(+6V),則T1和T2之間的電位接近0V,T3和T4之間的電位約為6V,因為T3的電阻等于T4的電阻。總之負載上從左到右有6V的電位。
但這里要記住,T3和T4的電阻相對較低,因此高電流電流過電阻的右側,
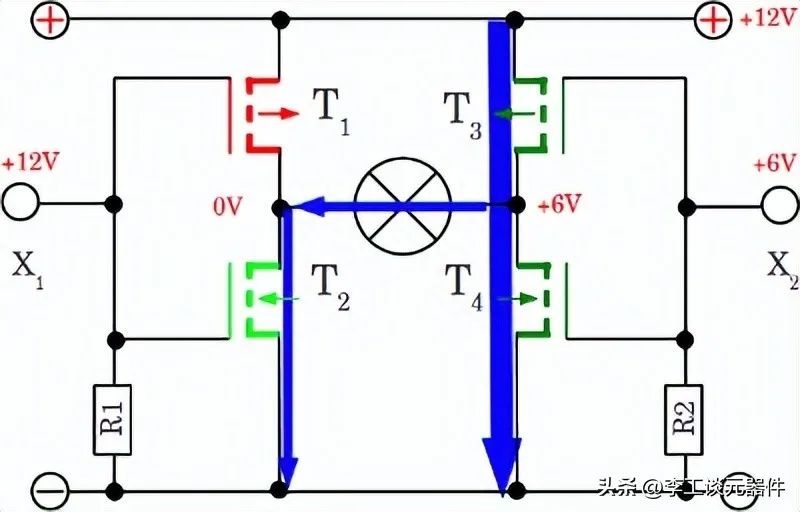
X1連接到正電源電壓,而X2僅連接一半電源電壓(+6V)
在H橋開關運行器件,意味著只要其中一個鉗位處的電位從正電源電壓變?yōu)?(反之亦然),總會有高電流在短時間內流過電路的支路,重疊的導通時間稱為交叉?zhèn)鲗Щ蛘咧蓖ā?/strong>
1、由曲線性RC電阻實現(xiàn)的開啟延遲
每當X1處的電壓從正電源電壓變?yōu)?V時,C1就會通過R1緩慢充電,因此T1的導通過程倍延遲,相反,C2通過正向偏置D2快速放電,因此T2幾乎沒有延遲地關閉。R5和R6是下拉電阻。
由曲線性RC電阻實現(xiàn)的開啟延遲
兩個線性RC電路(每個電路由47KΩ電阻和1nF電容組成)延遲MOS管的開啟過程,高側MOS管(黃色曲線)立即關斷,因此C1的放電電流流過正向偏置二極管(D1)。由于C2的充電電流流經(jīng)R2,低側MOS管的導通過程被延遲。在信號的下降沿,低側MOS管(紅色曲線)的關閉過程比高側MOS管的開啟過程更快。因此現(xiàn)在D2正向偏置。
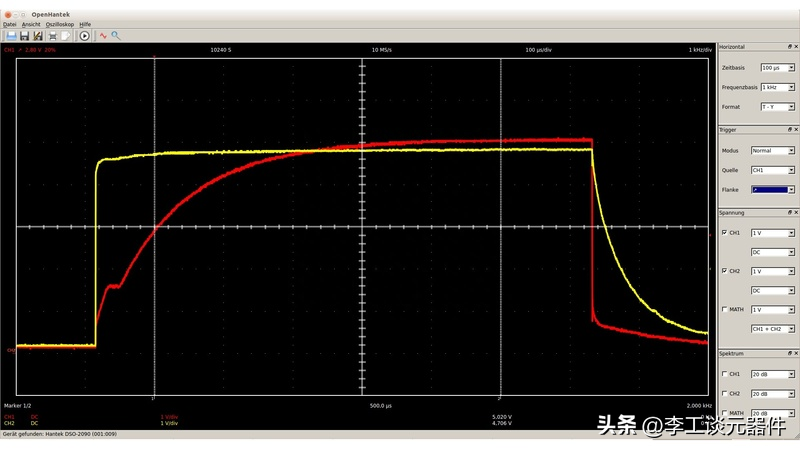
兩個線性RC電路(每個電路由47KΩ電阻和1nF電容組成)延遲MOS管的開啟過程
七、脈寬調制H橋
如果負載需要部分功率,可以通過脈寬調制來控制H橋。為了避免脈寬信號開關運行期間發(fā)生交叉?zhèn)鲗В仨毟碾娐罚缦聢D:
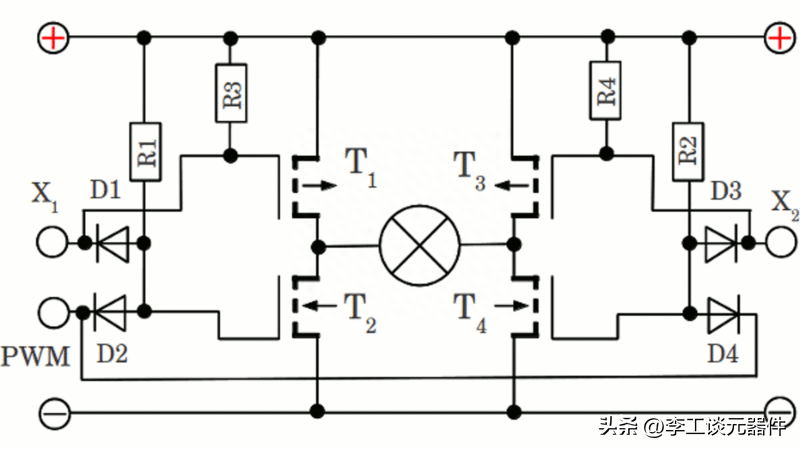
脈寬調制H橋
P溝道MOS管仍然由X1和X2處的信號直接開關,而N溝道MOS管分別由X1和脈沖寬度信號X2和脈沖寬度處的信號控制信號。
如果正電源電壓連接到X1,則T1被關閉,直到脈沖寬度信號也處于高電平時,T2才會接通。如果其中一個鉗位接地,T2將關閉,因為D1和D2或者2者正向偏置,拉動T2的柵極接地。另一方面,如果X1處于低電平,則即使脈沖寬度信號也是如此。利用X1和X2,可以控制負載兩端電壓的極性,而功率控制則通過第3個輸入鉗位處的脈沖寬度信號來完成。
二極管形成一個與門。每當改變極性時,如果脈寬信號處于高電平,就會發(fā)生擊穿,在改變極性之前,確保PWM信號設置為低電平。
八、電壓電平轉換H橋
當H橋在12V輸入電壓下運行時,輸入鉗位的高電平必須為12V,例如:計算機僅提供5V或者3.3V的輸出電壓,解決問題的辦法是插入3個放大電路:
電壓電平轉換H橋
通過使用MOS管,流經(jīng)輸入鉗位的電流最小化為流經(jīng)下拉電阻R6-R8的電流。請記住,電壓電平會被放大級反轉。例如:脈沖寬度信號輸入鉗位的高電平在D2和D4處變?yōu)榈碗娖健R虼嗽诘碗娖叫枰}沖寬度信號的電平來為H橋中點之間的負載供電。
反之亦然,在改變H橋的極性時,需要脈沖寬度信號處于高電平以防止交叉導通。
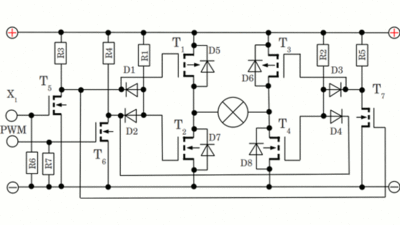
九、反激二極管H橋
反激二極管可以用于最大限度地減少感性負載引起的失真。這些二極管必須與負載相連,但極性相反。當使用H橋控制負載時,極性可以改變,因此二極管將變得正向偏置,為了避免這種清理,需要4個二極管才能在單個開關上產生單個反擊二極管所需的效果:
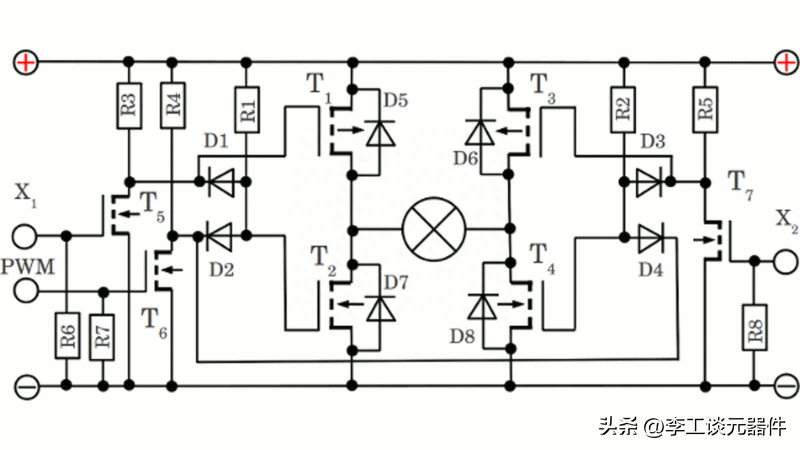
反激二極管H橋-4個二極管
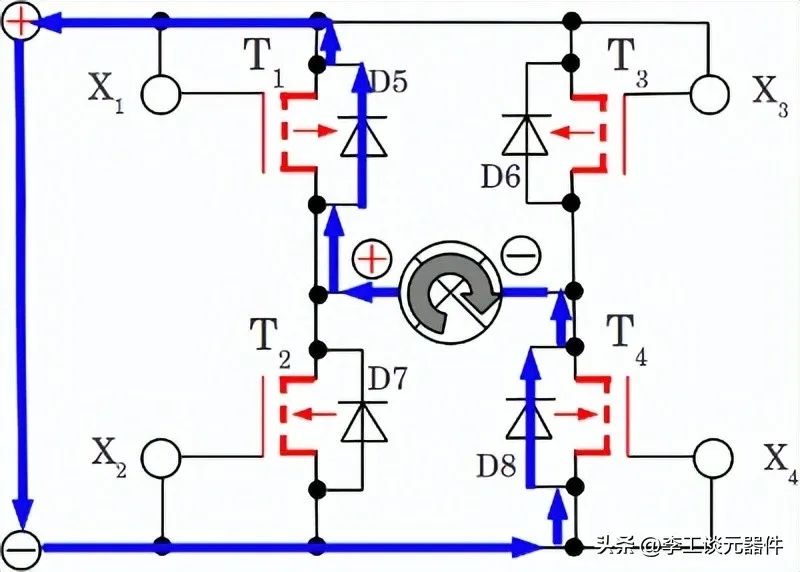
如果感應電壓的正電位位于負載左側,則流經(jīng) D5 和 D8 的電流將消除電壓尖峰。反之亦然,如果正電勢在右側,負電勢在左側,則電流流經(jīng) D6 和 D7。二極管的最大電流不應低于 MOS管的最大漏極電流。
正向偏置肖特基二極管的電壓降(0.15-0.45V)低于硅類型二極管(0.6-1.7V),因此器件消耗的功率明顯較低。
上面H橋電路的元件:
-
T2、T4 = N 溝道 MOSFET IRLZ24N
-
T5 - T7 = N 溝道 MOSFET 2N7000
-
R1 - R8 = 12kΩ
-
D1 - D4 = 低功耗硅二極管
-
D5 - D8 = 肖特基二極管 例如 SB2040
電路可以在5-12V的電源電壓下工作。輸入鉗位處的電壓電平應高于 3V。當晶體管在沒有散熱器的情況下運行時,通過負載的電流應低于 5A。
十、控制簡單
當移除X2處的下拉電阻并將這些輸入鉗位連接到T5的漏極引腳(T5是用于放大X1信號的MOS管)時,兩個輸入引腳可以控制H橋。
X1控制H橋的極性:正極在負載左側,X1接高電平,正極在右側,X1接低電平等級。第二個引腳是脈寬信號,用于控制提供負載的功率。
H橋的輸入鉗位越少,控制設備所需的計算機或者微控制器的輸出鉗位就越少。缺點是靈活性較低。
移除X2處的下拉電阻并將這些輸入鉗位連接到T5的漏極引腳
十一、動態(tài)制動H橋
為了激活制動力能,至少需要三個輸入鉗位(X 1、X 2和PWM)。
當通過H橋開關電動汽車的電機時,必須考慮反激二極管的另一個影響:由于慣性,如果不再向電機提供動力,車輛不會立即停止。電機繼續(xù)旋轉并開始作為發(fā)電機運行。
由此產生的感應電壓的極性與預先施加到電機上的電壓的極性相同。流經(jīng)反激二極管和電機繞組的電流現(xiàn)在正在減慢車輛的速度,請記住機械能會轉化為電能。這些過程稱為動態(tài)制動。
所產生的電力的一部分作為熱量消散在反激二極管和電機電線中,而其余部分則返回到電源線。需要更復雜的電路來安全地返回所產生的電力到車輛的電池,這稱為再生制動。
沒有反激二極管,動態(tài)制動可以由 H 橋控制:如果所有晶體管都“關閉”,則沒有電流流過電機的繞組,因此車輪會旋轉,而不會因動態(tài)而減慢速度制動。
當然,必須考慮感應電壓的峰值。要激活動態(tài)制動過程,必須“打開”兩個低側或兩個高側 MOSFET。
現(xiàn)在,電機的夾具之間存在一條導電路徑,車輛在發(fā)電時會主動減速。電力在晶體管和電機電線中以熱量的形式耗散,這就是為什么這種制動被稱為變阻制動。
變阻制動。
十二、N溝道 MOS管H橋
p 溝道 MOSFET 的主要載流子是空穴,其遷移率低于電子(n 溝道類型內部的主要載流子)。因此,假設器件尺寸相同,p 溝道 MOSFET 的導通電阻通常高于 n 溝道 MOSFET 的導通電阻。
為了最大限度地減少 H 橋消耗的功率,可以使用四個 n 溝道 MOSFET,而不是在低壓側使用兩個 n 溝道類型和在高壓側使用兩個 p 溝道類型。
N溝道 MOS管H橋
假設電路連接到輸出為 +12V 的電源。X 3接地,因此T 3被“關閉”。X 4連接到+12V,因此T 4被“接通”。右側中點電位接近0V。
左半橋的情況很棘手:X 2接地,因此 T 2被“關閉”。X 1連接到+12V,那么T 1的源極和柵極之間的電位是多少?
如果 T 1“接通”時,左半橋中點的電位約為 12V。因此T 1的源極和柵極之間的差值接近0V,使T 1 “關閉”。如果T 1和T 2都“關閉”,則中點處的電勢將約為+6V,導致T 1處的源極柵極電壓為6V ,這足以將這些器件“打開”。所以真相是在兩個極值之間。
如果n溝道MOSFET的閾值電壓約為2V,則系統(tǒng)將在T 1部分“導通” 時在中點趨向于約10V的電勢。
T
為了能夠完全“導通”T 1,高端 MOS管 的柵極引腳處的電位高于 14V(12V + 2V 閾值),因此需要第二個電源。驅動 MOS管的電路比高端 p 溝道 MOSFET 組成的 H 橋更復雜。
完全“導通”T 1,連接第二個電源
以上就是關于橋式電路的內容,希望大家能夠點贊、分享、收藏,如有問題或者建議,歡迎在評論區(qū)留言。
免責聲明:本文來源頭條李工談元器件,版權歸原作者所有,如涉及作品版權問題,請及時與我們聯(lián)系,謝謝!
-
模擬技術
+關注
關注
17文章
469瀏覽量
39733 -
張飛電子
+關注
關注
54文章
175瀏覽量
12588
原文標題:圖文| 12種橋式電路詳解,電路圖+工作原理
文章出處:【微信號:fcsde-sh,微信公眾號:fcsde-sh】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
無橋PFC工作原理和電路結構
請問下圖中的電流源電路工作原理是什么?
三相可控橋式整流電路的工作原理、結構組成及應用
三相橋式整流電路的工作原理、結構組成及性能特點
電壓型單相全橋逆變電路工作原理
分析單相橋式spwm逆變電路的工作原理
原理圖和電路圖區(qū)別在哪 電氣控制電路圖介紹
H橋電機驅動電路電路圖 H橋電機驅動電路的工作原理和控制方式





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論