


作者:Eugene Wang
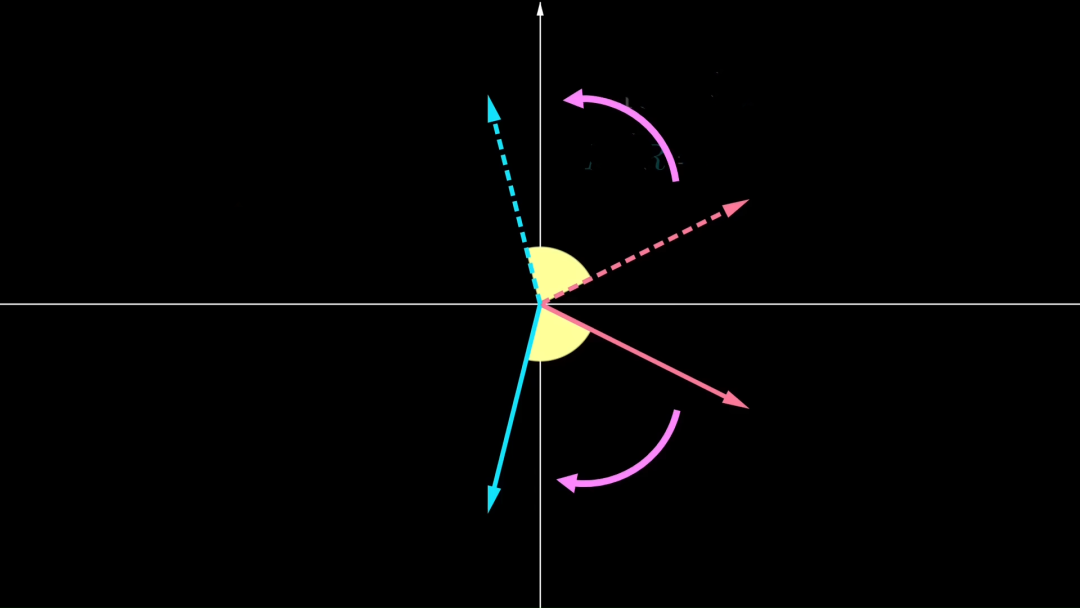
如果我們想要對二維矢量進行旋轉,我們需要知道旋轉點和旋轉角度。如果要進行三維旋轉,我們需要指定旋轉軸和旋轉角度。那么,我們可以進行四維旋轉嗎?或者說,我們可以進行更復雜的旋轉嗎?事實上,我們可以將其簡化為,有一個n維向量,然后將這個向量旋轉到另一個n維向量,我們將用更系統的方式來表達旋轉。
首先,我們先來看看旋轉的一些性質。第一個性質是旋轉是線性變換,這種線性意味著兩個方程:和。如果你在二維平面畫出這些向量,你就可以驗證它們。
由于旋轉的線性屬性,我們可以把旋轉寫成矩陣的形式:n維向量的旋轉等于旋轉矩陣R乘以n維向量。剩下的目標就是找到旋轉矩陣R,使得。
接下來,我們要來講旋轉的第二個性質:如果我們只是單純旋轉,向量的長度和向量之間的角度應該保持不變。這一性質意味著,兩個向量的點積在旋轉前后保持不變。也就是說,如果原來是v·w,那么兩個向量旋轉后就變成了Rv·Rw,兩個點積是相等的:。
對于實數向量,我們也可以將點積寫為第一個向量的轉置乘以第二個向量:。我們也可以將等式右邊進行一下變換,就可以得到。因為這對于所有的向量v和w都是成立的,所以中間的就是單位矩陣。
因此,歸結起來第二個性質就是滿足的旋轉矩陣,我們把滿足該性質的所有矩陣的集合表示為,O代表正交,n代表矩陣R的階。
然而,長度和角度保持不變不僅僅只有旋轉能做得到,反射也能做到這一點。因此,與反射對應的矩陣也將是屬于O(n)的。所以,我們需要旋轉的第三個性質,即它不會改變順序。我的意思是,假如原本從向量v到向量w是逆時針,那么經過反射后就變成了順時針,而旋轉卻不會做出這樣的改變。因此,根據線性代數的知識,我們知道旋轉矩陣R的行列式應該為正的,所以。
因此,如果一個矩陣已經屬于O(n),并且它的行列式為1,那么它就屬于SO(n):。這里的S代表特殊的,對應于行列式為1的附加要求。
以上的討論都是針對實向量,如果我們要旋轉復數向量的話,我們只要稍微進行修改就行。首先,我們把旋轉矩陣R替換成矩陣U,它們之間的區別是U是一個復矩陣。其次,從第二個性質我們得到了,現在我們要把它改成,其中意味著我們除了轉置之外還取復共軛。最后,我們還有:和。
這樣一來,我們就將旋轉推廣到了更高的維度和復數。雖然這些旋轉矩陣很難直接去求解,但幸運的是,這些矩陣的集合,無論是O(n)、SO(n)、U(n)還是SU(n),都會形成稱為李群的東西,這些都可以通過李理論去求解。
編輯:黃飛
-
矩陣
+關注
關注
1文章
435瀏覽量
35365 -
線性代數
+關注
關注
5文章
50瀏覽量
11256
原文標題:如何進行高維旋轉
文章出處:【微信號:bdtdsj,微信公眾號:中科院半導體所】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
如何導入機械臂的三維模型
可對海量高維數據進行有效的聚類分析算法
可對海量高維數據進行有效的聚類分析算法
如何進行OPCDCOM配置







 工商網監
工商網監

評論