 叉式移動機器人(AGV/AMR)整體解決方案
叉式移動機器人(AGV/AMR)整體解決方案
叉式移動機器人(AGV/AMR)是在叉車上加載各種導引技術,構建地圖算法,輔以避障安全技術,實現叉車的無人化作業。

▲ 叉式移動機器人無人化作業
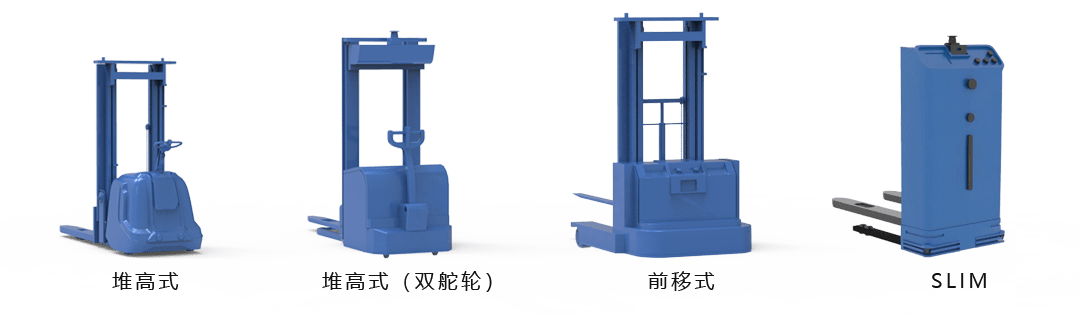
▲叉式移動機器人常見車型
叉式移動機器人在行業初期,各機構、企業所使用的控制系統大多來自海外,隨著國家提出加強創新投入,規避產業鏈核心技術“卡脖子”風險,以及智能物流系統逐漸成熟和市場化需求的改變,物流設備智能控制管理系統的國產化成為行業共同關注的重點。
目前叉式移動機器人的一些關鍵零部件,如電機、驅動器、傳感器和控制器仍然非常依賴國外進口,急需高品質的國產化方案。
科聰叉式移動機器人解決方案構成:
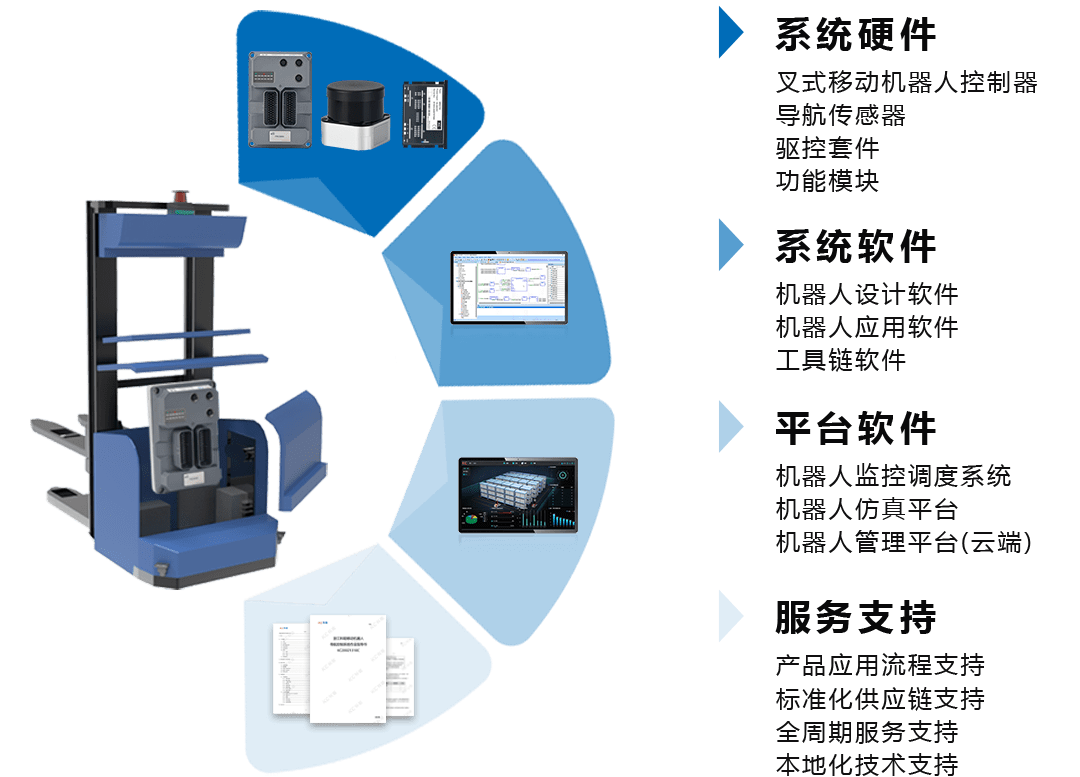
以科聰叉式移動機器人為核心的解決方案有何強勢之處?
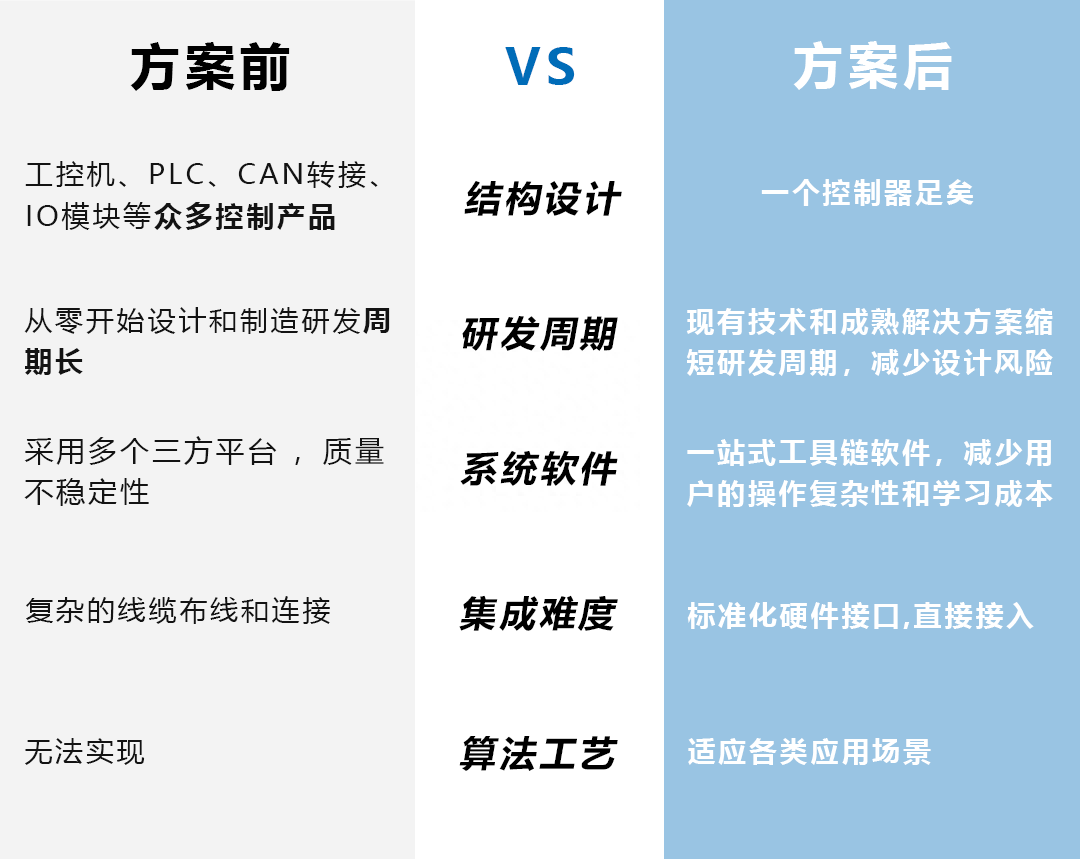
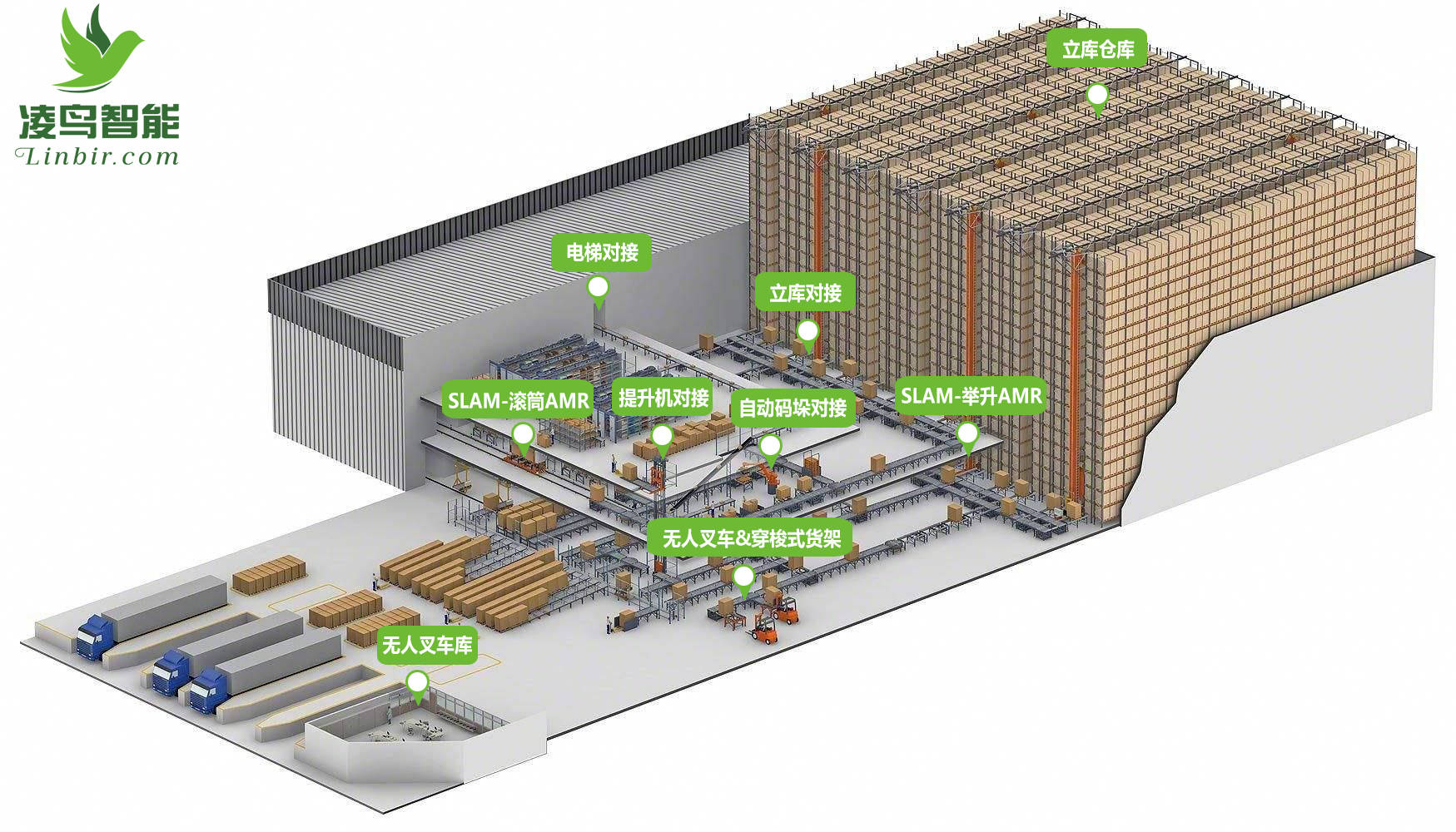
叉式移動機器人解決方案可以輕松面對不同叉車類型和眾多應用場景的制造和應用。幫助制造商和終端用戶降低構建移動機器人的復雜性,降低成本、提高生產效率、改善質量控制降低維修成本等。
關于叉式移動機器人控制器:
4核處理器,集成全自主可編程內核和圖形化低代碼應用開發環境編程器
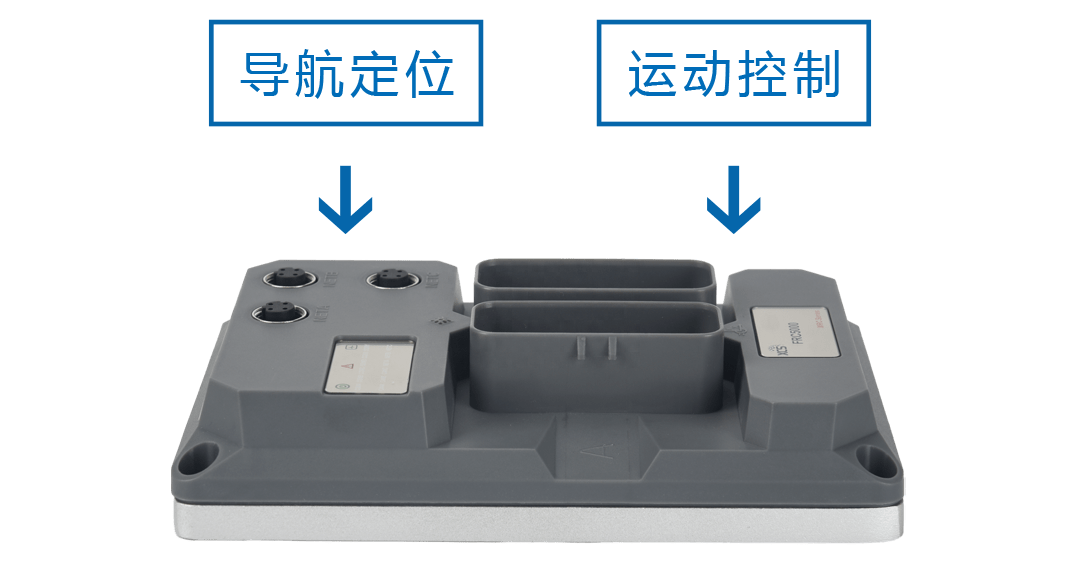
內嵌導航定位算法
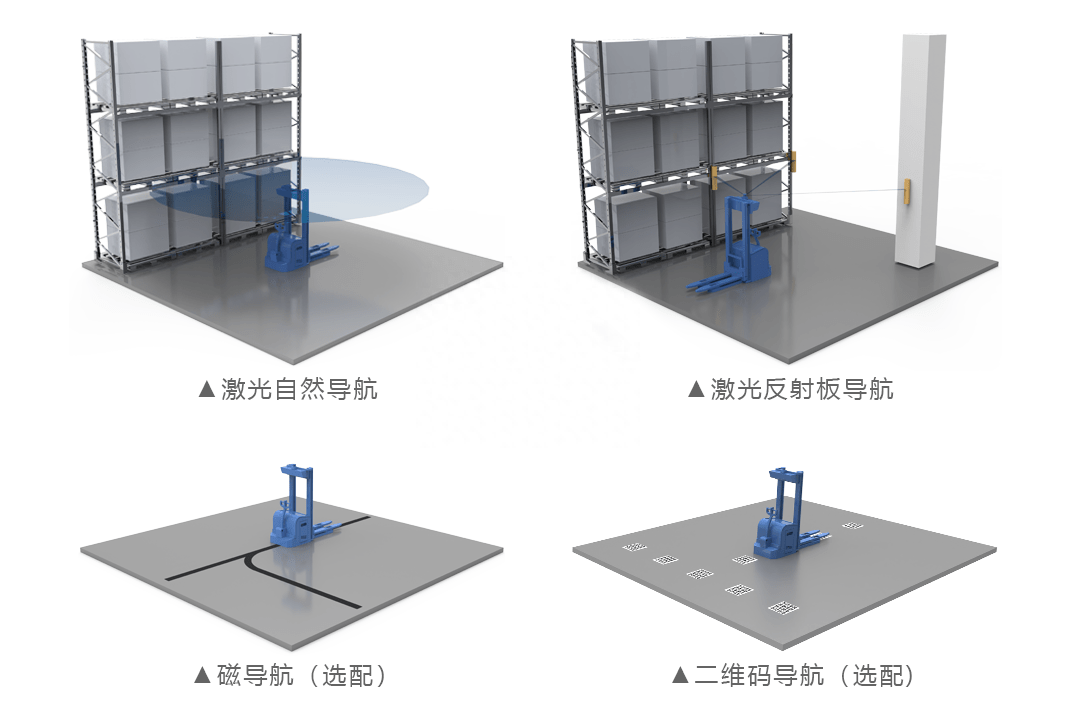
支持激光導航、磁導航(選配)、二維碼導航(選配)
內嵌運動控制算法
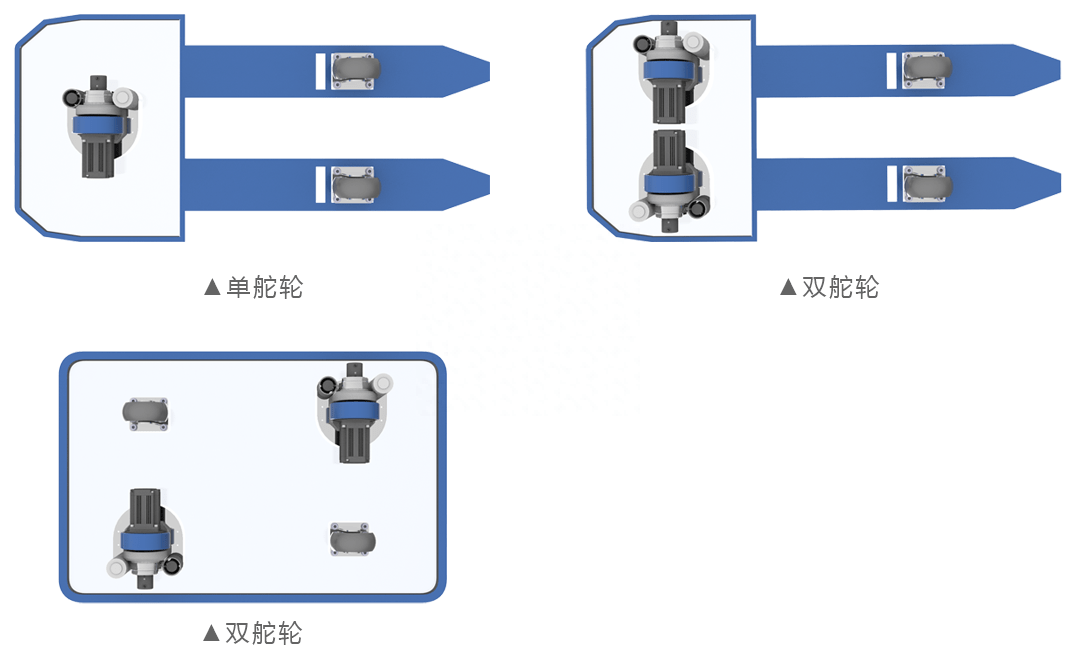
支持單舵輪、雙舵輪
內嵌工藝算法
支持各類型場景應用功能,棧板識別、視覺定位、標志物二次定位、導航激光輔助避障、3D視覺避障等
▲導航激光輔助避障
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
解決方案
+關注
關注
0文章
526瀏覽量
40296 -
AMR
+關注
關注
3文章
442瀏覽量
30475 -
移動機器人
+關注
關注
2文章
778瀏覽量
33746 -
AGV
+關注
關注
27文章
1372瀏覽量
41469
發布評論請先 登錄
相關推薦
慣性測量單元傳感器在自主移動機器人的應用
使機器人能夠在動態變化的環境中導航。本文將為您介紹IMU的功能特性,與在自主移動機器人(AMR)的應用,以及ADI所提供的相關解決方案。

利用解決方案供應商的優勢加速自主移動機器人開發
自主移動機器人(AMR)是一種復雜的系統,與自動駕駛汽車有許多共同之處--它們需要感知、電機驅動、電源轉換、照明和電池管理。也許最大的挑戰是將這些子系統整合到一個最終產品中--由于需要集成來自
發表于 02-19 15:11
?360次閱讀

無軌激光AGV移動機器人如何構建地圖?
AGV 談到智能工廠就不得不說智能物流,AGV小車作為智能物流的重要設備,是鏈接智能生產、智能工廠、智能物流的重要紐帶。隨著AGV技術的發展,無需任何輔助定位標志的無軌激光AGV
移動機器人核心科技解碼:導航、感知與掌控力的深度剖析
富唯智能移動機器人的核心技術主要包括導航、感知與控制。這些技術共同決定了移動機器人在不同環境中的自主行動能力和工作效率。
移動機器人的技術突破和未來展望
移動機器人已經成為現代社會不可或缺的一部分,在各個領域發揮著越來越重要的作用。在這個過程中,富唯智能機器人以其卓越的技術突破,引領著移動機器人領域的發展潮流。


傳感器融合如何賦能自主移動機器人
自主移動機器人(AMR)可幫助制造商提高生產效率、增強安全性并節省大量成本,因而在各行各業得到廣泛應用。2022年全球AMR市場規模為86.5億美元,預計2022年至2028年間的復合年增長率(CAGR)將達到18.3%。

德州儀器與亞馬遜合作開發自主移動機器人
Amazon Robotics 在開發其首款自主移動機器人 (AMR) Proteus時,充分利用與 TI 近十年的合作關系獲得了技術專業知識。我們公司的嵌入式處理器、電源和連接解決方案
智能移動機器人
富唯智能移動機器人分為復合機器人和轉運機器人,搭載ICD核心控制器,實現一體化控制,最快可實現15分鐘現場機器人的快速部署,無縫對接產線,配合自研2D/3D視覺系統,精準抓取搬運工件。

移動機器人四大賦能技術及NXP解決方案,本文總結全了!
隨著傳感器和電子器件技術的突飛猛進,移動機器人領域正在快速發展。工程師們通過融合新技術,推動了移動機器人生態系統在多個層面的持續演進。
海康機器人第100000臺移動機器人下線
海康機器人第100000臺移動機器人已經成功下線 。這是一個重要的里程碑,標志著海康機器人在全品類移動機器人(AMR)領域取得了顯著的進展。
ROHM開始開發一種新的機器人移動技術“NoMaDbot”
在制造和物流行業,AGV(自動搬運機器人)和 AMR(自主移動機器人)的應用越來越廣泛。由于勞動力短缺問題而引發擔憂的同時,能夠在工廠和倉庫與人協同作業的

機械臂和移動機器人兩種控制系統方案對比
機械臂對精度和運動穩定性的要求較高,因此計算量大、周期短,比移動機器人一般要高1到2個量級。移動機器人一般對同步精度要求不高,其配置相對較低。
發表于 03-11 09:53
?1261次閱讀






 工商網監
工商網監
評論