 基于無人機高光譜遙感的荒漠草原覆蓋度提取方法研究
基于無人機高光譜遙感的荒漠草原覆蓋度提取方法研究
引言
草原生態系統促進經濟社會可持續發展、計劃到2025年和2035年 草原綜合植被蓋度要分別達到57%和60%以 上,但目前部分區 域的草原生態系統承受力和抵御干擾的耐受力極度脆弱,有向逐漸 裸露化或荒漠化發展的趨勢。草原荒漠化主要表現為植被覆蓋度 (FVC)減少和裸地面積增加等,傳統的地面小尺度覆蓋度采集 受天氣、時間和地形地貌的影響較大,且成本高、勞動強度大、費 時費力;而衛星雖然可以大尺度采集覆蓋度信息,但是收集速度緩 慢且獲得圖像的細節水平下降。無人機(UAV)+ 高 光 譜 可 獲 得中尺度區域的高空 - 譜分辨率圖像,兼顧了效率和精度要求,在 相對較小區域的草地退化監測中將發揮重要作用,正成為傳統地面 監測和航空、衛星遙感的優越補充。FVC定義為統計范圍內植被冠層的垂直投影面積占土地面積的比例,是研究生態系統平衡、 土 地退化和土壤侵蝕等的關鍵參數之一,也是評價草地退化和荒漠化的敏感指標。
目前低空UAV 遙感FVC反演法可以分為回歸模型法、 混合像元分解法和深度學習法等。UAV高光譜遙感滿足了當前遙感朝著高空- 譜分辨率、多時相的發展方向,關鍵在于能否選擇或建立一種適用性強、耗時少、準確性高的覆蓋度估算方法。利用光譜分辨率高、光譜波段信息豐富的高光譜成像儀結合低空UAV組建 UAV 高光譜遙感系統,對試驗區荒漠草原的高光譜影像進行數據采集和數據預處理,并利用回歸模型法、深度學習法ResNet18模型及其改進的3D-ResNet18模型對影像中的植 被和裸土等地物進行分類,并在分類基礎上開展基于UAV高光譜遙感信息的荒漠草原FVC計算方法研究。旨在實現利用高光譜遙感系統對荒漠草原從數據獲取、數據分析、理論方法及驗證等完整流程的嘗試,為草原退化評價及治理提供依據,對于草原畜牧養殖和生態環境保護均具有重要的現實意義,符合國家和地區 “助力山水林田湖草沙生命共同體建設 ”的發展需求。
數據采集與分析
2.1 研究區概況
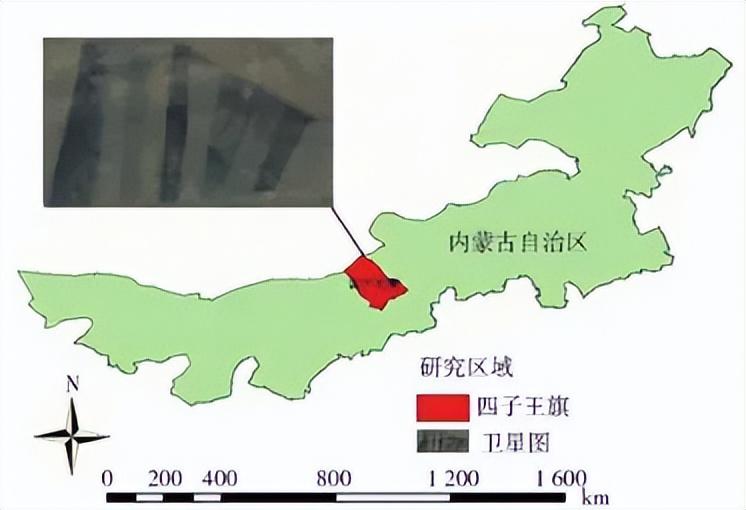
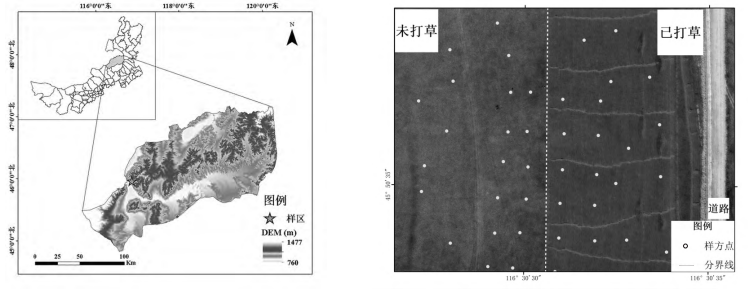
研究區位于烏蘭察布市四子王旗格根塔拉草原 (41°47′33″N,111°53′58″E),詳 見 圖1。
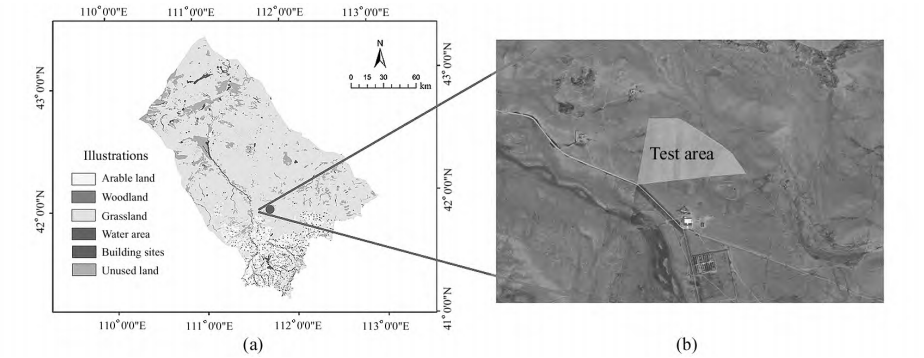
圖1 研究區位置圖
海拔高度介于1100—1200m之間,降水量稀少,水資源匱乏,具有荒漠草原典型的地域代表性,是典型草原與荒漠的緩沖地帶。研究區植被草層稀 疏低矮、交錯覆蓋、種類匱乏,屬短花針茅荒漠草原地帶。植被 平均高度為8cm,平均蓋度為17%—25%。
2.2 試驗設計
2.2.1野外調查及樣方布置
野外地面調查包括記錄GPS信息、樣方編號,實測樣方FVC。為了樣方框堅固耐用且避免被風刮走,由白色PVC管制作,用 U 型鐵絲將其固定于地面上,隨機布置1m×1m的樣方框60個。FVC 的確定采用照相法。樣方冠層照片通過在樣方中心的垂直上方2.2m 處拍攝全范圍俯視照實現。選用 RTK 測定試驗區和樣方的具體位置,收集了所有研究樣方框的 GPS信息,選定地面控制點對圖像進行幾何校正。
2.2.2空中數據采集
采用UAV 懸停方式采集試驗區內地物高光譜遙感影像,結合2021年草原氣候特點和牧草生長期特性,在牧草的生長茂盛期———2021年7月27日— 8月8日時采集數據。為保證采集質量,選擇晴朗、無云、光照條件較好,無卷云、濃積云等,風力較小時進行測量,采集時間為10∶00—14∶00,且要求每10—20min使用標準白板進行1次校正,以便消除光照強度變化對UAV高光譜圖像產生的影響。UAV搭載高光譜儀垂直于地面的方向30m高度測量研究地塊植被的冠層、群落的高光譜數據。每個懸停點采集2幅高光譜遙感影像,單幅圖像采集時間耗時7s,包含懸停點間飛行時間,1個架次約可采集86幅遙感影像,即43個懸停點。
2.2.3 數據預處理
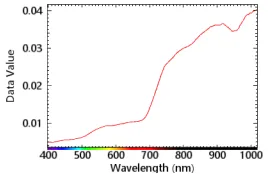
首先,通過人工檢查去除過曝、欠曝、彎曲、抖動的遙感影像,選出成像質量最好的遙感影像。其次使用光譜專業軟件進行反射率校正,并識別真正的反射率值和感興趣的特征。最后,使用方法進行數據降維,計算式如下:

(1)式中,X為張量,r為高光譜圖像中的行數,c為高光譜圖像中的列數,b為高光譜圖像中的維數。式(1)計算的高光譜圖像F-norm2在 0—67波段(波長為397—548.2nm)的F-norm2的斜率較小,即表示該波段范圍內包含的信息量較少;而在 214—256波段(波 長 為 909.7—1019.4nm)的F-norm2的斜率較大,即表示該波段范圍內存在明顯的噪聲干擾,因此經行值降維后保留的68—213波段(波長為550.5—906.8nm),單個圖像所占空間大小也隨之大幅減少 ,有效提高了數據后處理的效率。
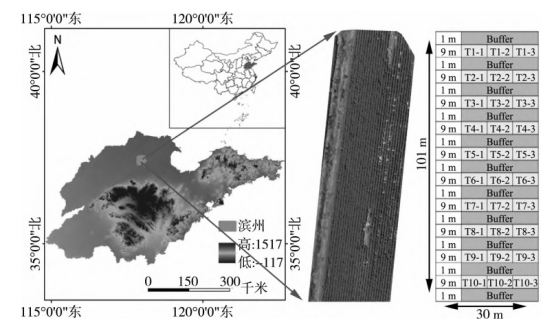
2.3 驗證值的確定
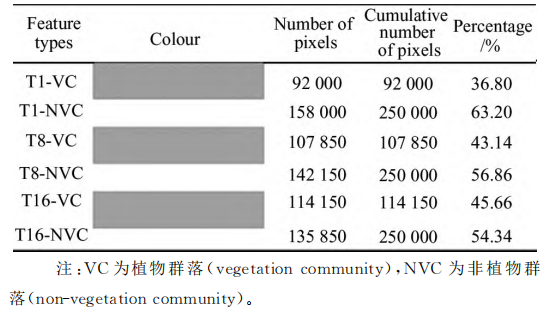
驗證值的確定一方面是依據實地設立1m×1m 的樣方框通過照相 法確定FVC,但是該方法存在一定的主觀判斷性而且只代表了局部的FVC。研究表明,基于照相法和全圖人工目視解譯相結合的方法對FVC的提取精度較高。為了雙重保險,后續又結合人工目視解譯方法對整張UAV高光譜圖像中植物群落和非植物群落(枯草和裸土)進行覆蓋度提取,其結果作為地表 FVC 的 驗 證 值,對各植被指數提取的草地 FVC 的精度進行驗證。本文從1080 組數據中選取20組有代表性的數據作為示例進行研究。20 組數據分別命名為T1、T2、T3、…、T19、 T20。由于圖像較多,將其中的T1、T8、T16組高光譜數據設為展示圖像,T1、T8、T16組數據覆蓋度的驗證值詳見表1。
表1植物群落和非植物群落驗證值
研究方法
3.1 回歸模型法
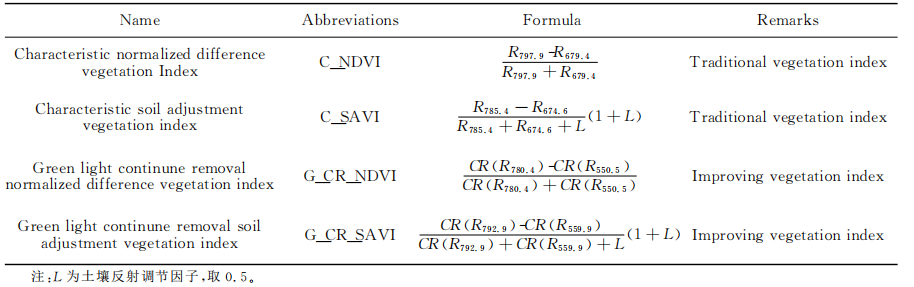
回歸模型法是通過對遙感數據的某一波段、波段組合或利用遙感數據計算出的植被指數與FVC進行回歸分析,建立經驗估算模型。通過回歸模型法構建荒漠草原FVC估算模型,選擇了2種傳統的適合于低密度覆蓋綠色植被區域的植被指數,分別為歸一化植 被指 數(NDVI)和土壤調整植被指數 (SAVI),在分析植被和土壤光譜曲線差異的基礎 上,通過簡單波段自相關選擇法及編程篩選最敏感的特征波段及組合,確定了植被指數相關系數較高的波段組合為525—600nm、620—780nm 和 780—900nm,相關系數均達0.8以上。對基于傳統植被指數的像元二分模型進行了FVC估算,并選取 20組數據進行精度驗證。選擇SAVI和 NDVI進行 連續統去除及光譜增強,并確定特征波段和波段最佳組合,對高光譜圖像進行連續統去除后,峰值點對應的反射率為1,而其他點的反射率均小于1,植物群落在可見光范圍中的500nm 和680nm 左右的吸收谷特征被放大,綠光550nm 附近反射峰更加明顯, 紅邊斜率增加明顯,這些變化有利于對光譜吸收特征波段及參數的提取,因此提出了綠光連續值土壤調整植被指數(G_CR_SAVI)和綠光連續值歸一化 植被指數(G_CR_NDVI),原始及改進的植被指數詳見表2。
表2原始及改進的植被指數
3.2 ResNet模型
該模型將殘差學習的思想引入到網絡結構中,通過跨層鏈接將殘差塊的輸入與輸出進行疊加求和,此項操作提升了反向傳播的效率,有效解決了深層網絡中出現的梯度爆炸及消失問題,提高了神經網絡訓練的速度,實現了利用深層網絡 結構提取更細的特征。利用 Pytorch模塊搭建 ResNet18CNN,該模型 共有20層,包括17個 卷 積 層、2個池化層和1個全連接層,模型結構圖詳見圖2。
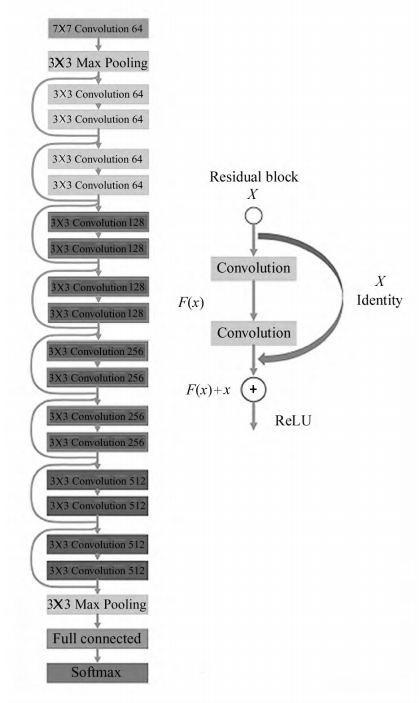
圖2 ResNet深度學習模型結構圖
每殘差塊中進行2次卷積層運算,并與卷積前的參數進行疊加,隨后利用激活函數ReLU 激活進入下一個殘差塊。卷積層的卷積核數最少為64個,最多為512個。
3.3改進3D-ResNet18模型
3D卷積核為 一 個 立 方 體,由3D卷積核組成的CNN 稱為3D 卷積神經網絡,通過3D卷積核 可以同時提取高光譜圖像lines、samples和bands方 向上的特征。公式如下:

(2) 式中,f為激活函數,l、w、h 分別代表卷積核立方體 的長、寬、高,m、n 分別代表上一層和本層的卷積核數,ulwhkn為圖像上(l,w,h)位 置上的值與上一層第m個卷積核的計算值,uδερkmn為 圖 像(δ,ε,ρ)位置上的值與卷積核的第n層、第k個卷積核的計算值。利用F-norm2降低噪聲干擾和高光譜數據的維數。在典型的深度學習模型 ResNet18的基礎上,將其2D卷積核3D卷積核,即3D-ResNet18。改進后的3D-ResNet18模 型 與 ResNet18模型具有相同的深度,共有20層,包括17個卷積層、2個池化層和1個全連接層,17個卷積層被分成1個卷積層和4個殘差塊。將卷積層中的2D卷積核改進為3D卷積核,在圖3中用Conv3×3×3-N表 示,N為卷積核數量,分別為64、64、128、256、512。每殘差塊中進行兩次卷積層運算,并與卷積前的參數進行疊加,隨后利用激 活 函 數 ReLU 激活進入下一個 殘差塊。為了提高處理速度,程序用高光譜影像裁剪為500lines×500samples×146bands,總 共250000個 像素。為了識別特征,隨機選擇60%的標記樣本 作 為訓練數據,其余的40%作為測試數據。
結果分析
4.1 評價指標
在進行覆蓋度估算模型的精度分析時,選 用以下3個指標進行驗證 分 析:估算值和實測值間的決定系數(R2)、估算值和實測值間的均方根誤差(RMSE )和估算 精 度(EA )。當 R2值越 接近1、RMSE的值越小且估算精度越 時,說明估測方程所得到的估算值與實測值的擬合效果就越好,模型的精度就越高。R2、RMSE、EA 的計算式如下:
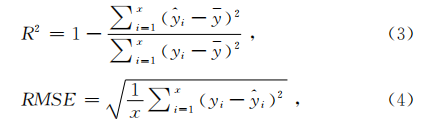
式中,

為第i個樣本的估算,yi 為第i個樣本的實 測值,:

為實測值的平均值,x 為樣本數量。

式中,Rm為均方根誤差,Me 為實測值的均值,EA 為估算精度。
4.2回歸模型法
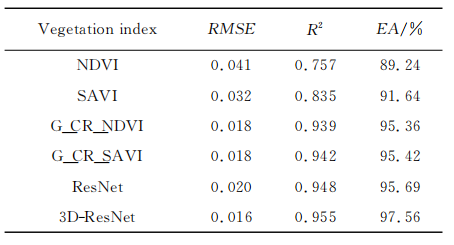
改進植被指數中提取的 FVC 與驗證值最為接近,其RMSE和EA 分別為0.018和 95.42%;其次為 G_CR_NDVI,RMSE 和EA 分別為 0.018和95.36%,SAVI提取的FVC與驗證值較為接近 ,其RMSE和EA分別為0.032和91.64%,詳見表3。
表3 植被覆蓋度與各方法對應的模型精度
從估算值與驗證值之間的散點圖來看,G_CR_SAVI和 G_CR_NDVI估算值緊密分 布在1∶1線的兩側,其中 G_CR_SAVI估算值與驗證值之間的R2高達0.942,G_CR_NDVI估算值與驗證值之間的R2高達0.939。基于改進植被指數與傳統植被指數的荒漠草原UAV高光譜圖像FVC估算精度大小依次為 G_CR_SAVI>G_CR_NDVI> SAVI>NDVI。分析表明:通過光譜增強及最佳波段選擇的改進 G_CR_SAVI和 G_CR_NDVI植被指數優于傳統的 SAVI、NDVI植被指數,FVC 估 算 精 度較傳統的植被指數 高出約4%,G_CR_SAVI在4個植被指數中的提取效果最好,最適合于荒漠草原UAV 高光譜影像 FVC的提取。最佳波段組合的植被指數計算結果詳見圖4。
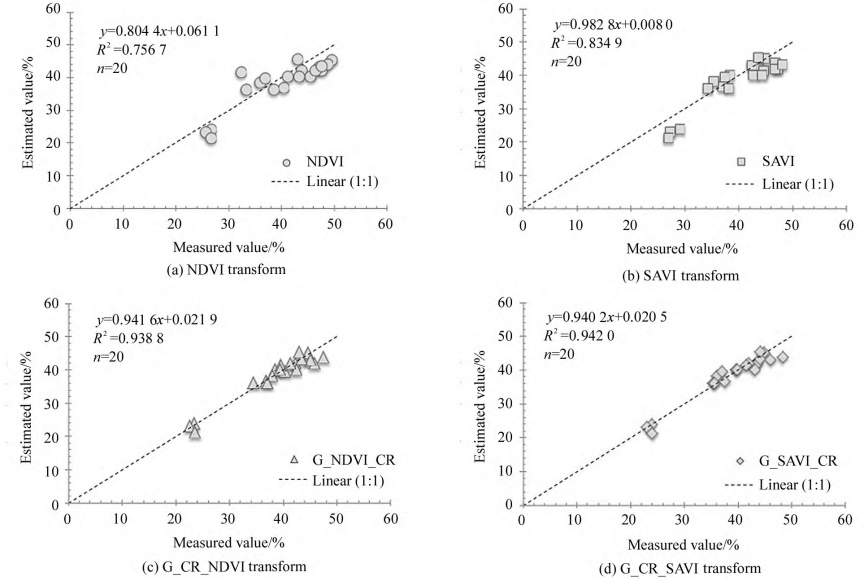
圖4 植被指數變換分布圖
4.3 深度學習法
為實現基于UAV 高光譜遙感的荒漠草原覆蓋 度人工智能化估算,制作了荒漠草原 UAV 高光譜覆 蓋度數據集,通過 ResNet18經典深度學習網絡模型對覆蓋度數據集進行分類,發現其對覆蓋度數據集取得了較理想的總體分類精度,并對覆蓋度數據集中的植被和裸土取得較高的單體分類精度。為進一步實現對荒漠草原UAV 高光譜數據中的覆蓋度高精度估算,基 于 ResNet模 型 建立3D卷積模型3D- ResNet,并進行模型結構與超參數優化,通過對卷積核數、卷積核尺寸、Batchsize等參數優化與對比,發現對覆蓋度數據集分類性能最佳的模型為3D-Res- Net,總體估算精度達97.56%,覆蓋度估算的RMSE 為0.016,詳見表3。
3D卷積網絡模型對覆蓋度數據集具有更好的提 取性能。相比于2D卷積僅能同時提取覆蓋度數據集中的2D光譜 信 息,3D 卷積可以同時提取光譜- 空間聯合信息,充分利用了高光譜覆蓋度數據集的數據特性,對細小特征的提取展現出良好潛力,得益于3D卷積核可以同時提取高光譜數據中3個維度的光譜信息,相比2D卷積核同時提取 X、Y2個維度的光譜信息,3D卷積核對地物的空間特征提取能力更強。通過對模型結構與超參數優化逐步提高了模型 性能,同時發現具有更卷積結構的3D-ResNet模 型展現出更好的性能。部分數據可視化結果如圖5 所示。
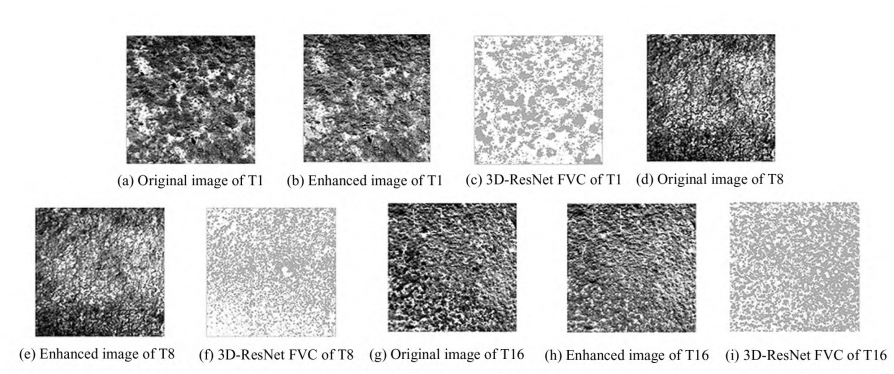
圖5覆蓋度估算模型可視化結果
3D-ResNet模型實現了對覆蓋度數據集地物的高精度、高效率、智能化識別,為基于UAV高光譜 遙感的荒漠化草原覆蓋度的快速、高效、精準統計奠定基礎。
5、總結
針對荒漠草原覆蓋度提取效率和精度較低的現狀,基于人工智能技術和3D 卷積深度學習方法,深挖了高光譜數據中的空間特征,建立了高效準確的高光譜遙感圖像的覆蓋度估算模型,驗證了3D-Res- Net模型在計算FVC為指標的草地退化評價的可行性和精確性。就估算精度而言,深度學習法優于回歸模型法,尤其是經過3D卷積核改進的深度學習模型最佳,總體估算精度達97.56%,可以實現智能化、 高精度、準確地荒漠草原 FVC提取。
推薦:
便攜式地物光譜儀iSpecField-NIR/WNIR
專門用于野外遙感測量、土壤環境、礦物地質勘探等領域的最新明星產品,由于其操作靈活、便攜方便、光譜測試速度快、光譜數據準確是一款真正意義上便攜式地物光譜儀。

無人機機載高光譜成像系統iSpecHyper-VM100
一款基于小型多旋翼無人機機載高光譜成像系統,該系統由高光譜成像相機、穩定云臺、機載控制與數據采集模塊、機載供電模塊等部分組成。無人機機載高光譜成像系統通過獨特的內置式或外部掃描和穩定控制,有效地解決了在微型無人機搭載推掃式高光譜照相機時,由于振動引起的圖像質量較差的問題,并具備較高的光譜分辨率和良好的成像性能。

便攜式高光譜成像系統iSpecHyper-VS1000
專門用于公安刑偵、物證鑒定、醫學醫療、精準農業、礦物地質勘探等領域的最新產品,主要優勢具有體積小、幀率高、高光譜分辨率高、高像質等性價比特點采用了透射光柵內推掃原理高光譜成像,系統集成高性能數據采集與分析處理系統,高速USB3.0接口傳輸,全靶面高成像質量光學設計,物鏡接口為標準C-Mount,可根據用戶需求更換物鏡。

審核編輯 黃宇
-
遙感
+關注
關注
0文章
245瀏覽量
16816 -
無人機
+關注
關注
229文章
10420瀏覽量
180138 -
高光譜
+關注
關注
0文章
330瀏覽量
9934 -
深度學習
+關注
關注
73文章
5500瀏覽量
121113 -
卷積網絡
+關注
關注
0文章
42瀏覽量
2163
發布評論請先 登錄
相關推薦
無人機低空高光譜遙感影像柑橘黃龍病植株監測模型探究
無人機遙感技術
無人機遙感系統的研究進展與應用前景
基于無人機高光譜遙感的火龍果種植株數提取技術
基于無人機高光譜遙感的森林可燃物分類方法研究-萊森光學
無人機遙感監測作物病蟲害脅迫方法
比較基于無人機高光譜影像和傳統方法的土壤類型分類精度

基于無人機高光譜遙感的典型草原打草對植被表型差異分析






 工商網監
工商網監
評論