") 總結(jié)!三維點(diǎn)云基礎(chǔ)知識(shí)
總結(jié)!三維點(diǎn)云基礎(chǔ)知識(shí)
1 三維信息獲取
獲取三維信息的形式一般分為接觸式和非接觸式:
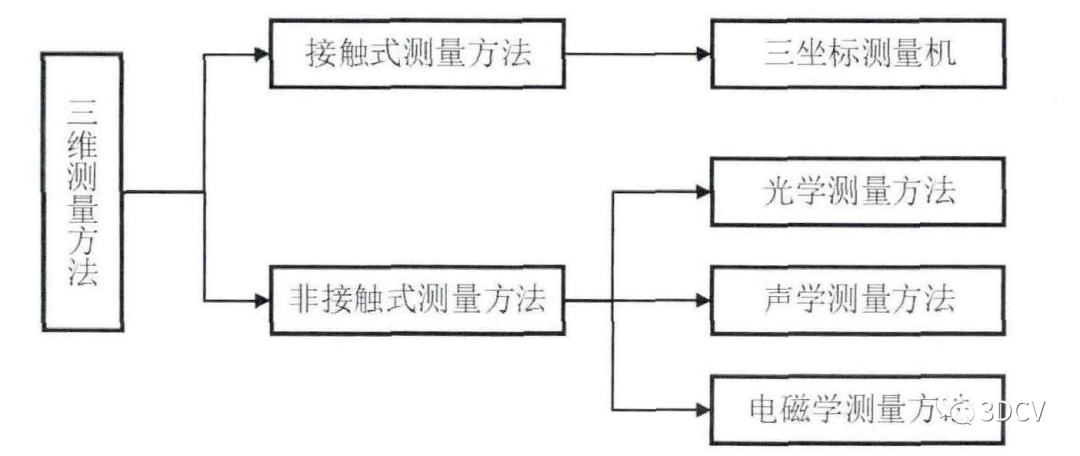
1.1 接觸式測(cè)量
使用測(cè)量機(jī)來(lái)獲取三維信息是最常用也是最方便的接觸式測(cè)量方法。但是它比較依賴(lài)機(jī)械結(jié)構(gòu)和傳感器的精度和靈敏度來(lái)獲取較高的測(cè)量精度。在實(shí)際使用的過(guò)程中這種方法存在較多的局限性。測(cè)量時(shí)需要接觸待測(cè)物體表面,非常容易劃傷物體表面破壞物體原有形貌。機(jī)械零件在長(zhǎng)時(shí)間的使用下,會(huì)產(chǎn)生一定的誤差,從而降低測(cè)量精度。在測(cè)量較大工件的時(shí)候,需要完全遍歷整個(gè)物體花費(fèi)時(shí)間和精力。
1.2 非接觸式測(cè)量
(1)立體視覺(jué)法
該方法具體通過(guò)六個(gè)步驟實(shí)現(xiàn):圖像的采集、系統(tǒng)相機(jī)標(biāo)定、特征模板匹配、圖像處理、三維仿真匹配以及三維重建。首先,通過(guò)兩個(gè)相機(jī)于不同位置對(duì)待測(cè)物體進(jìn)行圖像信息感知獲取。然后根據(jù)三角測(cè)量原理獲得待測(cè)表面的三維信息,還原三維模型并進(jìn)行重建,立體視覺(jué)法原理如圖所示。
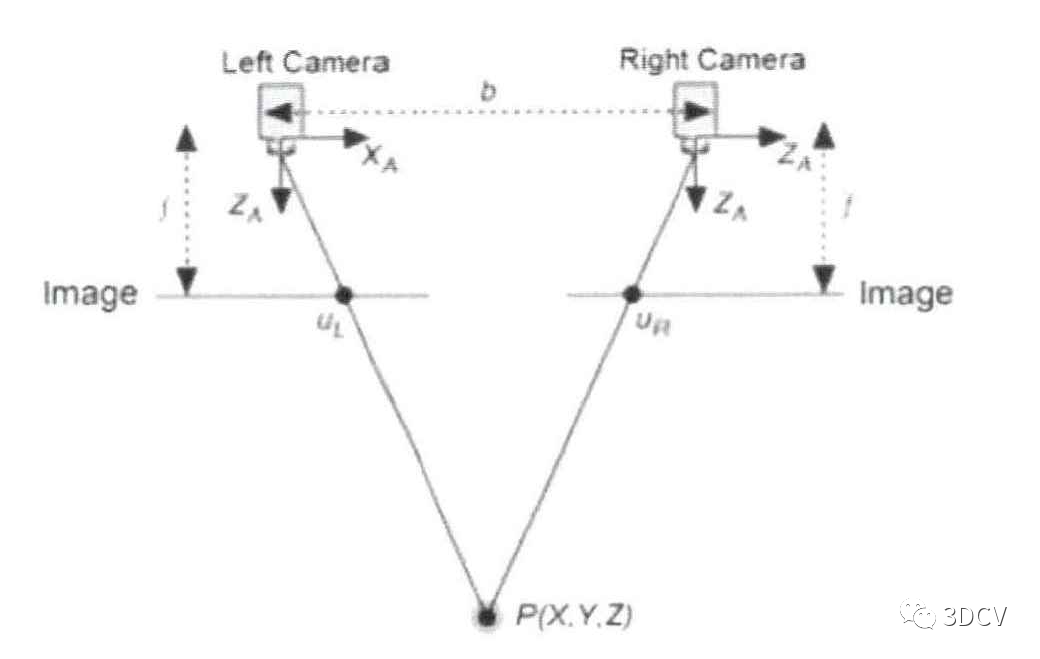
但是雙目視覺(jué)不適合單調(diào)缺乏紋理的場(chǎng)景,會(huì)出現(xiàn)匹配困難導(dǎo)致匹配誤差較大甚至匹配失敗等問(wèn)題。
關(guān)注公眾號(hào)后臺(tái)回復(fù)「CV」,即可免費(fèi)領(lǐng)取計(jì)算機(jī)視覺(jué)精品視頻與慕尼黑工業(yè)大學(xué)、巴塞羅那自治大學(xué)沉淀多年的計(jì)算機(jī)視覺(jué)課件資料,包括相機(jī)標(biāo)定、立體匹配、三維重建、SLAM、三維點(diǎn)云、缺陷檢測(cè)、深度估計(jì)、四旋翼無(wú)人機(jī)等。
(2)飛行時(shí)間法
飛行時(shí)間法是用激光對(duì)物體表面不斷發(fā)射脈沖信號(hào),并對(duì)其反射回來(lái)的信號(hào)進(jìn)行捕獲,計(jì)算激光來(lái)回傳播的時(shí)間,接著根據(jù)光度即可確定物體空間位置,原理如圖所示。
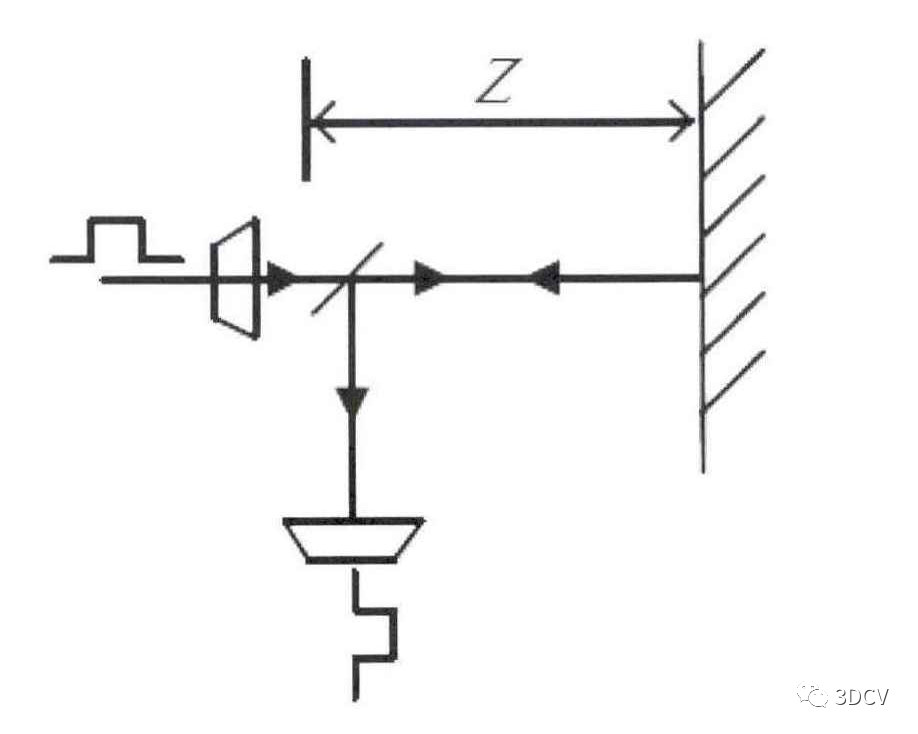
飛行時(shí)間測(cè)量法有很多優(yōu)點(diǎn):它可以用來(lái)測(cè)量較遠(yuǎn)距離的物體的三維信息,適用的范圍較廣,同時(shí)利用激光脈沖信號(hào)可以避免系統(tǒng)受到環(huán)境光的影響。但是此方法消耗功率大,會(huì)產(chǎn)生大量的熱量以至于不適合長(zhǎng)時(shí)間使用。
(3)線激光法
線激光法是使用外部激光線進(jìn)行主動(dòng)投影,在待測(cè)物體表面形成可見(jiàn)光束,然后使用二維相機(jī)進(jìn)行拍攝獲取信息,根據(jù)計(jì)算還原待測(cè)物體的三維信息。利用三角測(cè)量原理:直射式測(cè)距法或是斜射式激光三角測(cè)距法,都可以完成對(duì)被測(cè)物體的全方位、高精度、非接觸測(cè)量。直射式激光測(cè)量法在測(cè)量視野范圍等方面視野更大具有一定的優(yōu)勢(shì)。相應(yīng)的斜射式的分辨率更高,圖像質(zhì)量也會(huì)高于直射式激光測(cè)量法。在需要激光線處于固定位置的時(shí)候則優(yōu)先選用直射式測(cè)量法。在對(duì)激光線與物體表面位置不固定時(shí)則需要選用斜射式測(cè)量法。
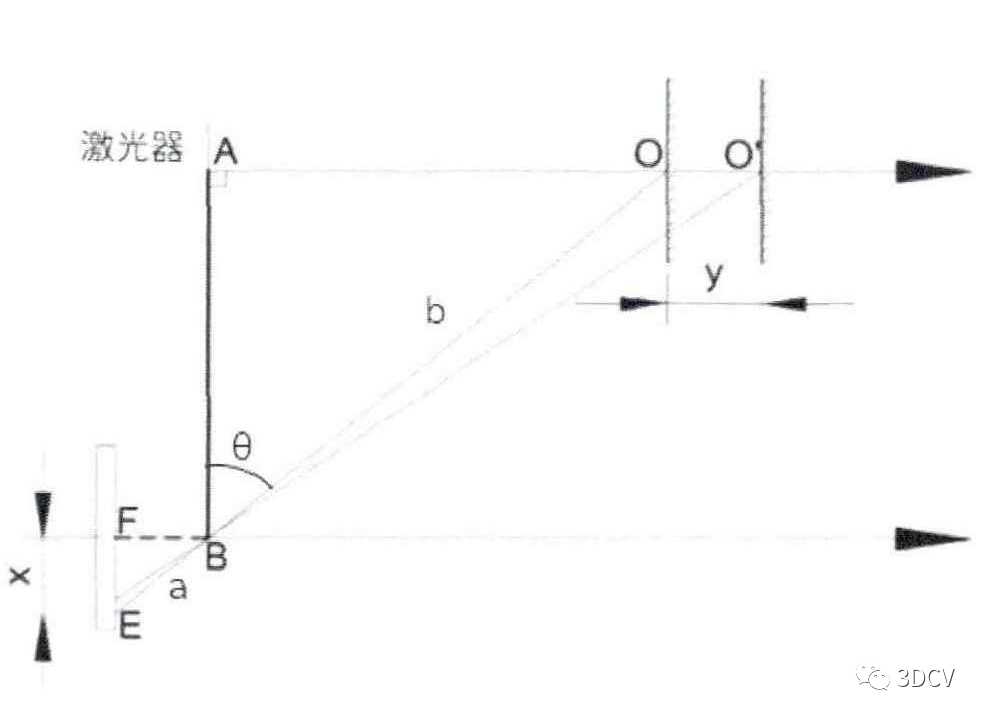
直射式光學(xué)三角法原理圖
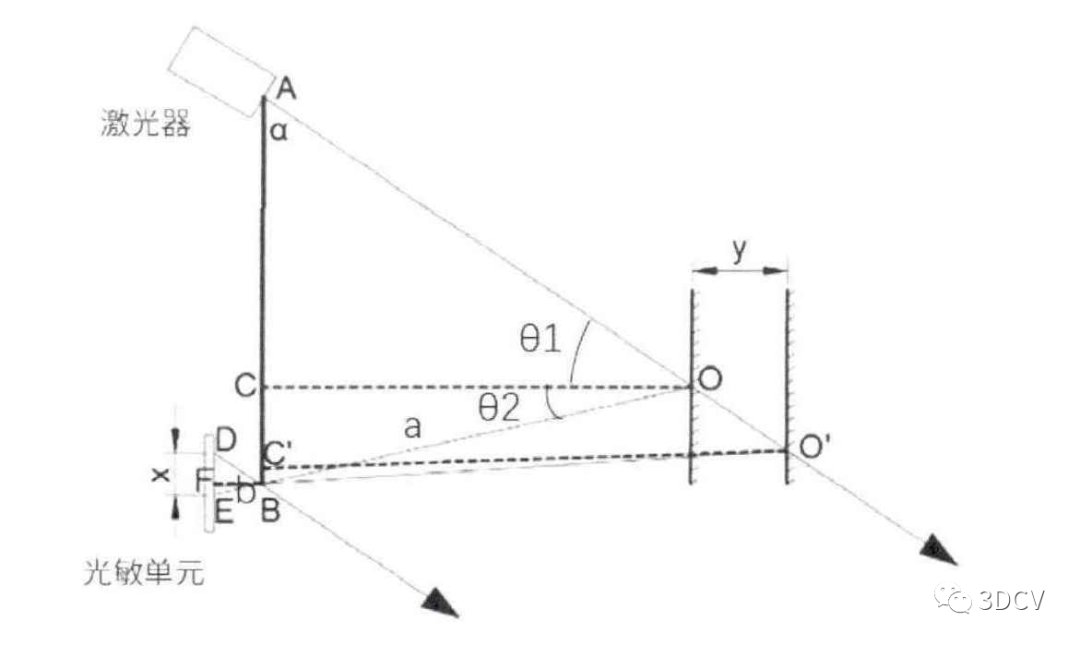
斜射式光學(xué)三角法原理圖
2 三維數(shù)據(jù)的表達(dá)形式
一般來(lái)說(shuō),三維數(shù)據(jù)的表達(dá)形式有體素網(wǎng)格、多視圖、點(diǎn)云和多邊形網(wǎng)格。體素網(wǎng)格可以理解為三維立體空間中的體積像素,概念上類(lèi)似于二維圖像中的像素概念。體素網(wǎng)格是具有固定大小和坐標(biāo)位置的三維網(wǎng)格,是點(diǎn)云數(shù)據(jù)的規(guī)則化手段。體素網(wǎng)格需要從與其他體素之間的位置關(guān)系中推測(cè)出空間位置關(guān)系。由于體素網(wǎng)格具有規(guī)則的結(jié)構(gòu),所以可對(duì)其進(jìn)行卷積操作,也可以構(gòu)建基于體素化點(diǎn)云的卷積神經(jīng)網(wǎng)絡(luò)。但點(diǎn)云數(shù)據(jù)具有無(wú)序性和密度不一致性,體素網(wǎng)格的大小難以設(shè)置,又體素的數(shù)量巨大,從而影響處理三維數(shù)據(jù)的效率。
體素網(wǎng)格的表達(dá)形式一般適用于虛擬現(xiàn)實(shí)、醫(yī)療成像白動(dòng)駕駛等領(lǐng)域。點(diǎn)云是三維空間中非結(jié)構(gòu)化數(shù)據(jù)的集合。點(diǎn)云能夠表達(dá)目標(biāo)在三維空間中的空間分布及表面特性,每個(gè)點(diǎn)是獨(dú)立的,點(diǎn)與點(diǎn)之間沒(méi)有顯著的聯(lián)系。點(diǎn)云由一系列包含重要幾何數(shù)據(jù)表示的點(diǎn)集組成。存儲(chǔ)點(diǎn)云數(shù)據(jù)的文件一般只包括三維坐標(biāo),有些數(shù)據(jù)集會(huì)增加顏色和強(qiáng)度等信息。為了后續(xù)處理數(shù)據(jù)更加的高效,存儲(chǔ)點(diǎn)云數(shù)據(jù)的文件一般以ASCII編碼的形式呈現(xiàn)。點(diǎn)云數(shù)據(jù)也可以被處理成一組具有公共坐標(biāo)系和全局參數(shù)的歐幾里德集,該集合對(duì)縮放和平移具有不變性。因此可以通過(guò)網(wǎng)絡(luò)模型直接提取點(diǎn)云數(shù)據(jù)的全局和局部特征,以實(shí)現(xiàn)各種計(jì)算機(jī)視覺(jué)任務(wù)。然而由于點(diǎn)云數(shù)據(jù)本身缺乏關(guān)聯(lián)性,會(huì)導(dǎo)致物體的表面信息會(huì)被弱化。點(diǎn)云的表達(dá)形式一般適用于三維重建和目標(biāo)檢測(cè)等領(lǐng)域。多邊形網(wǎng)格也是三維空間中非結(jié)構(gòu)化數(shù)據(jù)的集合,是由近似多邊形的幾何面組成。幾何面的交點(diǎn)叫共享頂點(diǎn),幾何面可以是三角形、四邊形或其他凸多邊形。共享頂點(diǎn)的坐標(biāo)位置和頂點(diǎn)之間的連接關(guān)系會(huì)被記錄在表中。多邊形網(wǎng)格的表現(xiàn)形式有利于實(shí)現(xiàn)立體實(shí)物的渲染。但生成多邊形網(wǎng)格是具有挑戰(zhàn)的,主要原因是多邊形網(wǎng)格是非結(jié)構(gòu)化的表現(xiàn)形式,只能用傳統(tǒng)的曲面重建方法生成,無(wú)法利用深度學(xué)習(xí)網(wǎng)絡(luò)生成。
3 點(diǎn)云數(shù)據(jù)特點(diǎn)
(1)非結(jié)構(gòu)化:不同于 RGB 圖片這種結(jié)構(gòu)化數(shù)據(jù),點(diǎn)云是三維空間中一系列點(diǎn)的集合,是一種不規(guī)則的數(shù)據(jù),沒(méi)有一種準(zhǔn)確的方法可以確定點(diǎn)與點(diǎn)之間的關(guān)系或者點(diǎn)與點(diǎn)的先后順序,這就使得無(wú)法使用常規(guī)的二維卷積神經(jīng)網(wǎng)絡(luò)提取特征。
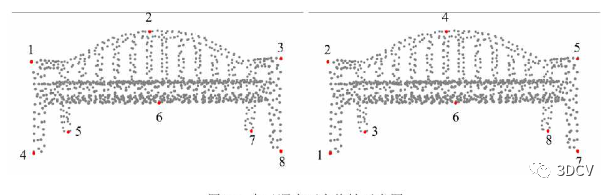
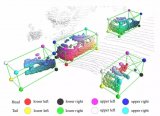
(2)順序可變換性:點(diǎn)云本質(zhì)上是一個(gè)n×3的矩陣,其中n為點(diǎn)云個(gè)數(shù),3 代表每個(gè)點(diǎn)包含x,y,z坐標(biāo)。不論這n個(gè)點(diǎn)的順序怎么變化,它們表示在三維空間中的形狀結(jié)構(gòu)和幾何特征是不變的,如下圖所示,雖然點(diǎn)云中點(diǎn)的順序改變了,但是投影到三維空間中的目標(biāo)大小、形狀等幾何性質(zhì)并未發(fā)生改變。這就使得點(diǎn)云中的點(diǎn)有n!種排列順序,即同一個(gè)目標(biāo)理論上有n!種可以表示它的點(diǎn)云。
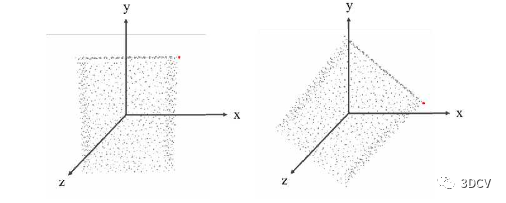
(3)旋轉(zhuǎn)不變性:當(dāng)同一個(gè)目標(biāo)在三維坐標(biāo)系中經(jīng)過(guò)旋轉(zhuǎn)以后,點(diǎn)云中所有點(diǎn)的坐標(biāo)基本上都會(huì)發(fā)生改變,但是旋轉(zhuǎn)前的點(diǎn)云與旋轉(zhuǎn)后的點(diǎn)云所代表的三維目標(biāo)還是相同的。如下圖所示,將三維坐標(biāo)中的點(diǎn)云旋轉(zhuǎn)以后,雖然各點(diǎn)的坐標(biāo)值發(fā)生了變化,但是變化后的點(diǎn)云投影到三維空間中表示的目標(biāo)的大小、形狀等幾何性質(zhì)并未發(fā)生改變。
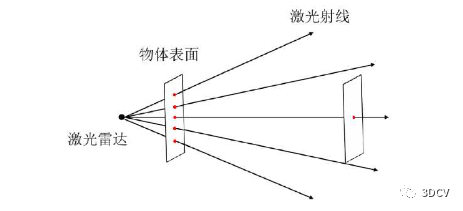
(4)采樣密度不均勻:由于激光雷達(dá)是以自身為中心放射狀的發(fā)射激光射線,這就導(dǎo)致距離激光雷達(dá)近的目標(biāo)點(diǎn)的密度較大,而離激光雷達(dá)距離較遠(yuǎn)的目標(biāo)點(diǎn)的密度較小,甚至有些目標(biāo)只能獲取幾個(gè)點(diǎn)的信息,如下圖所示,同一個(gè)物體,在距離較近的時(shí)候采樣點(diǎn)數(shù)量多,在距離較遠(yuǎn)的時(shí)候采樣點(diǎn)數(shù)量少。
—END—
-
傳感器
+關(guān)注
關(guān)注
2550文章
51035瀏覽量
753077 -
圖像處理
+關(guān)注
關(guān)注
27文章
1289瀏覽量
56722 -
點(diǎn)云
+關(guān)注
關(guān)注
0文章
58瀏覽量
3789
原文標(biāo)題:總結(jié)!三維點(diǎn)云基礎(chǔ)知識(shí)
文章出處:【微信號(hào):3D視覺(jué)工坊,微信公眾號(hào):3D視覺(jué)工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
基于深度學(xué)習(xí)的三維點(diǎn)云配準(zhǔn)方法
起點(diǎn),經(jīng)過(guò)點(diǎn),終點(diǎn),三點(diǎn)xyz,畫(huà)三維圓弧。
如何運(yùn)用LabVIEW中的三維散點(diǎn)控件
三維快速建模技術(shù)與三維掃描建模的應(yīng)用
港中文和商湯研究員提出高效的三維點(diǎn)云目標(biāo)檢測(cè)?新框架
計(jì)算機(jī)視覺(jué):三維點(diǎn)云數(shù)據(jù)處理學(xué)習(xí)內(nèi)容總結(jié)
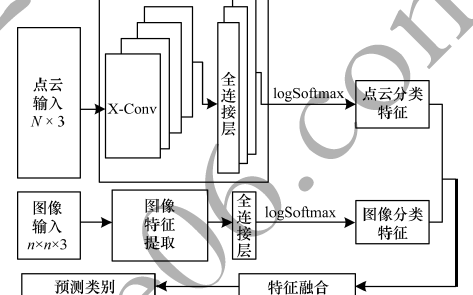
通過(guò)多模態(tài)特征融合來(lái)設(shè)計(jì)三維點(diǎn)云分類(lèi)模型
基于深度學(xué)習(xí)的三維點(diǎn)云語(yǔ)義分割研究分析
點(diǎn)云的概念以及與三維圖像的關(guān)系

三維點(diǎn)云數(shù)據(jù)的兩種結(jié)構(gòu)Kdtree和Octree
什么樣的點(diǎn)可以稱(chēng)為三維點(diǎn)云中的關(guān)鍵點(diǎn)呢?
一文詳解點(diǎn)云及三維圖像處理技術(shù)
泰來(lái)三維|三維掃描服務(wù)_三維激光掃描儀測(cè)量山體滑坡點(diǎn)云建模
泰來(lái)三維|數(shù)字化工廠_煤礦三維掃描數(shù)字化解決方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論