 英創匯智線控轉向解決方案讓汽車更加智能、更加安全
英創匯智線控轉向解決方案讓汽車更加智能、更加安全
引言:
汽車行業在“新四化”目標的牽引下快速發展,汽車電動化與智能化取得了顯著的成果。汽車智能化的發展對汽車底盤提出了新的需求,傳統汽車底盤在響應速度、執行精度、安全性等方面不再能滿足智能汽車的要求,汽車底盤由傳統底盤向線控底盤過渡。其中,線控轉向(Steering-by-Wire,SBW)是線控底盤中控制橫向運動的核心部件,是實現高階自動駕駛的重要執行機構。國務院印發的《新能源汽車產業發展規劃(2021-2035)》中將純電動汽車底盤一體化、線控執行系統等列為重點技術攻關工程。國標《GB17675-2021 汽車轉向系基本要求》中刪除了不得裝用全動力轉向機構的要求(1999年的3.3),法規層面已允許轉向系統方向盤與轉向器之間的物理解耦。國家戰略的推動以及法規標準的落地對于線控轉向(SBW)產品的大批量產業化應用具有直接的促進作用。本文將從轉向技術的發展路徑、技術方案、關鍵技術等方面對英創匯智的線控轉向(SBW)解決方案進行詳細介紹。
1?
轉向技術發展路徑
轉向系統是汽車底盤的關鍵部件之一,對于汽車的操穩性、安全性、舒適性起到至關重要的作用。隨著汽車工業電動化的深入,轉向系統經歷了從機械轉向系統(MS)、機械液壓轉向助力系統(HPS)到電子液壓助力轉向系統(EHPS)、電動助力轉向系統(EPS)再到線控轉向(SBW)的發展歷程。

圖1-1 汽車轉向系統發展路徑
圖片來源:天風證券研究報告《智能電動汽車賽道深度二:線控轉向,高階智能駕駛核心部件》
相比機械和液壓轉向系統,電動助力轉向系統(EPS)的結構更加簡單、助力控制響應更快,同時能耗也更低,而且不需要保養和維護,是目前汽車轉向系統的主流產品。線控轉向(SBW)相比EPS最大區別在于方向盤和執行機構之間無機械連接,因此在成本控制、設計靈活性、功能豐富性、空間布置等方面具有明顯優勢。
轉向系統作為底盤核心零部件,具有很高的技術壁壘。我國汽車工業起步相對較晚,因此當前德國、美國、日本、韓國的供應商巨頭仍然占據著轉向系統的大部分市場,尤其是高端EPS和線控轉向(SBW)系統,國內仍然處于追趕的狀態。但是隨著國內汽車產業鏈的日漸成熟,一些企業也開始逐步掌握轉向系統的核心技術,未來有望快速提升所占的市場份額。
2?
英創匯智線控轉向技術方案(T-SBW)
2.1 線控轉向的系統方案
如圖2-1所示為英創匯智的線控轉向(SBW)系統方案示意圖,主要由方向盤執行器(HWA)和前輪執行器(RWA)組成。線控轉向(SBW)相比EPS系統最大的卻別就是沒有中間軸,即方向盤執行器與前輪執行器在機械上是完全解耦的,因此具備更加靈活可調的轉向比和更加舒適的路面反饋,同時也為自動駕駛場景下的方向盤靜默、方向盤折疊提供了可能性。
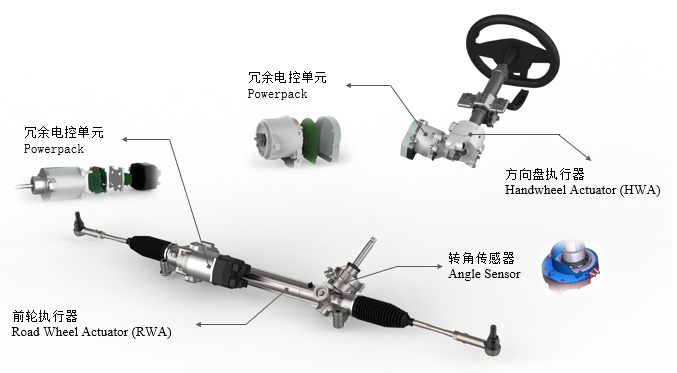
圖2-1 線控轉向(SBW)系統電氣架構示意圖
?方向盤執行器(Handwheel Actuator, HWA):主要由方向盤、轉向管柱、減速器、TAS傳感器、冗余電控單元組成,主要功能是獲取駕駛員的意圖,并將駕駛員期望的方向盤轉角信號給到前輪執行器(RWA),同時根據前輪執行器反饋的齒條力模擬車輛行駛的路面反饋力,為駕駛員提供路感反饋信息。
?前輪執行器(Road Wheel Actuator, RWA):前輪執行器有機械轉向器、轉角傳感器、冗余電控單元等組成,主要功能是接收方向盤執行器(HWA)發送的期望轉角指令,并通過控制電機實現齒條的橫向移動,最終實現轉向功能。
?冗余電控單元(Fail-Operational Powerpack):方向盤執行器(HWA)和前輪執行器(RWA)均需要電控單元作為執行器,分別實現路感反饋控制和前輪轉向的功能。而采用冗余的電控單元主要是為了支持高階自動駕駛工況,即在自動駕駛場景下,如果線控轉向(SBW)系統的方向盤執行器(HWA)或前輪執行器(RWA)出現了任何一種單點失效,該部件要具備失效可運行的功能(Fail-Operational)來保證路感不丟失或者前輪不失去轉向能力。英創匯智線控轉向(SBW)系統的方向盤執行器(HWA)和前輪執行器(RWA)電控單元均采用了全冗余電控方案驅動六相永磁同步電機的方案,單點失效后系統仍然具備路感反饋以及執行轉向控制的能力。
?轉角傳感器(AngleSensor):前輪執行器(RWA)需要精準地跟蹤期望轉角,因此需要轉角傳感器測量實際的小齒輪輸入轉角。
2.2 線控轉向的電氣架構
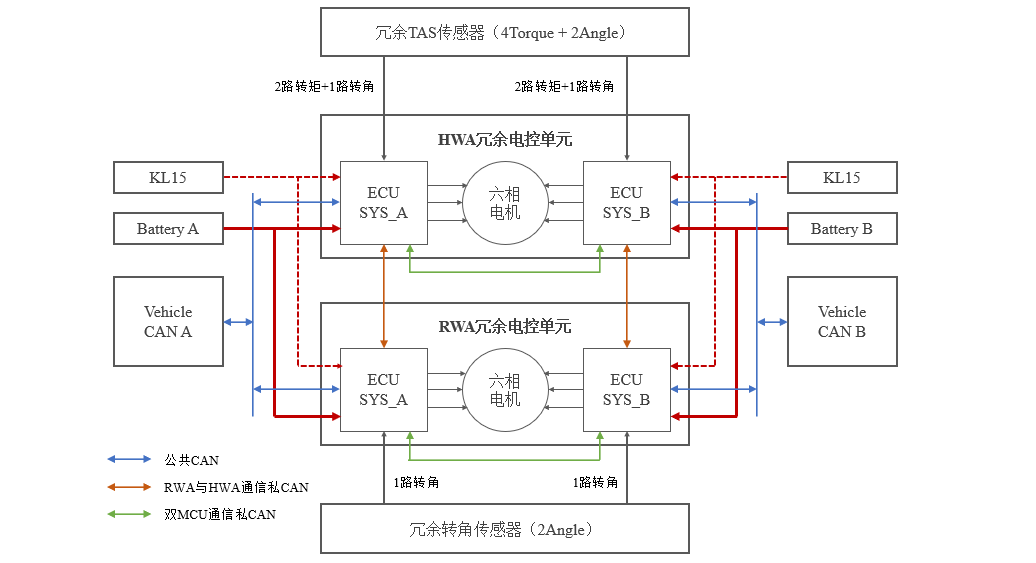
圖2-2 線控轉向(SBW)系統電氣架構示意圖
如圖2-2所示為英創匯智線控轉向(SBW)系統的電氣架構示意圖,其中車輛具備冗余的電源、公共CAN通信網絡,方向盤執行器(HWA)和前輪執行器(RWA)均采用全冗余的電控單元,分別接入不同的電源和CAN通信網絡,實現獨立的兩個系統外部的電氣隔離。全冗余電控單元兩個ECU之間也通過CAN通信來實現信號交互,從而可以進行信號交互、協同控制。方向盤執行器(HWA)和前輪執行器(RWA)之間通過私CAN進行通信,傳遞期望轉角信號、齒條力信號等。方向盤執行器(HWA)的每個ECU需要采集雙路轉矩信號與單路的絕對轉角信號(支持功能安全ASIL D等級),因此對應“4+2”的TAS傳感器;前輪執行器(RWA)每個ECU需要采集單路的絕對轉角信號(支持功能安全ASIL D等級),因此對應2路轉角信號的角度傳感器。
2.3線控轉向的算法架構
如圖2-3所示為英創匯智線控轉向(SBW)系統算法架構示意圖。根據方向盤執行器(HWA)的功能可知主要實現的算法包含參考手力計算、力矩疊加控制、手力跟蹤控制、轉角疊加控制、變傳動比控制、轉角指令計算等。可以看出,線控轉向(SBW)系統中,方向盤執行器(HWA)實現駕駛員的手感控制依靠力矩閉環的算法,這是與傳統EPS的開環力矩算法完全不同的。前輪執行器(RWA)的主要算法包含轉角跟蹤控制以及齒條力估計算法。轉角跟蹤控制通過轉角傳感器測量小齒輪轉角作為反饋信號,實現轉角的閉環控制,進而實現精準的轉向控制。齒條力估計算法對轉向器的齒條力進行觀測,并作為路感反饋信號發送給方向盤執行器(HWA),實現路感反饋模擬計算。
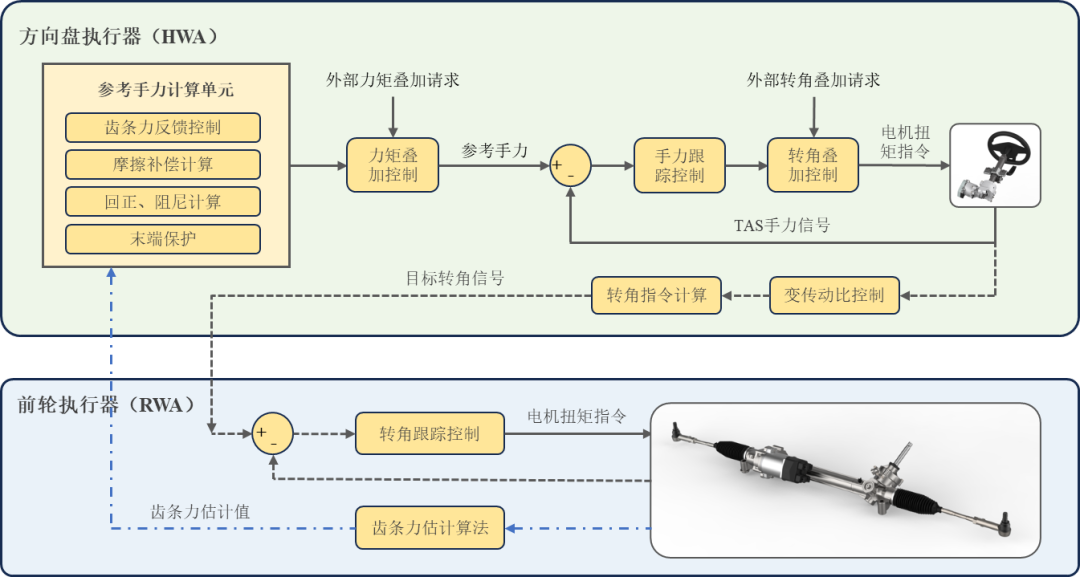
圖2-3 線控轉向(SBW)系統算法架構示意圖
3?
英創匯智T-SBW關鍵技術
3.1 齒條力觀測
如圖3-1所示為線控轉向前輪執行器(RWA)的齒條力估計算法架構,其中分別采用了基于車輛模型的齒條力估算方法(Vehicle Estimator)和基于轉向系統模型的估算方法(Steering Estimator)。
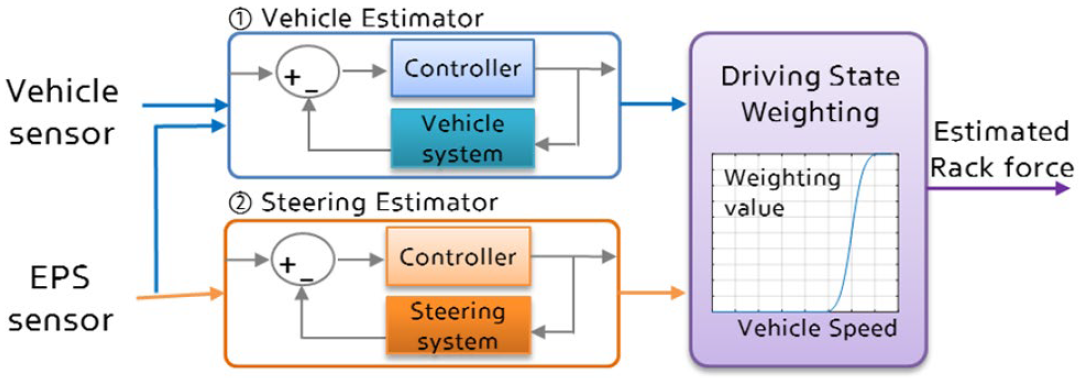
圖3-1 齒條力估計算法示意圖
圖片來源:Kim, C., Son, D., Sabato, Z., and Lee,B.,"ImprovementofSteeringPerformanceUsingSteeringRackForceControl,"SAETechnicalPaper2019-01-1234,2019,https://doi.org/10.427/2019-01-1234.
Vehicle Estimator使用了車輛的二自由度模型,根據車輛的橫向加速度、橫擺角速度、方向盤轉速對齒條力進行估算;Steering Estimator使用了簡化的轉向系統動力學模型,通過小齒輪角速度、助力電機轉速、助力電機輸出轉矩等對齒條力進行估算。在車輛速度較低時,基于車輛的二自由度模型估算誤差較大,Steering Estimator的性能優于Vehicle Estimator;車速較高時,基于車輛的二自由度模型估算齒條力能達到較高的精度,此時Vehicle Estimator的性能優于Steering Estimator。因此,實際應用根據車速信號對兩種算法的估算結果進行調和(Driving State Weighting),從而得出在全工況都較優的估算結果。
3.2 力矩閉環算法
如圖3-2所示為方向盤執行器的力矩閉環算法。首先根據齒條力估算的結果進行路感反饋控制,首先對齒條力進行適當的濾波,濾除高頻的振動信號,然后基于路感反饋的MAP確定初始目標手力。這部分相比傳統EPS開環控制的Boost Curve實現了直接設定目標手力,對于手感風格的調試更加方便。為了進一步優化駕駛手感,增加主動回正、阻尼控制的手力分量計算。主動回正功能模擬傳統EPS的回正效果,提升駕駛體驗。阻尼控制增加系統的穩定性,防止方向盤在回正過程中出現“搖頭”現象。力矩閉環算法已經將系統的摩擦力完全補償掉,因此無需對系統的摩擦力進行額外的補償,但是適當地“重構”系統的摩擦力,可以讓手感更加真實、體驗更好,另外也可以防止過度轉向。手力跟蹤控制模塊要求能夠對參考手力進行精確的跟蹤控制,并且具有較快的響應速度和較強的魯棒性。此外,參考手力閉環跟蹤控制算法要具有較好的穩定性。
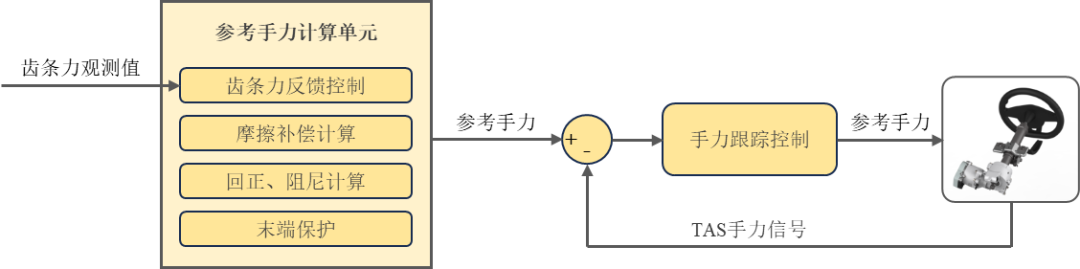
圖3-2 HWA力矩閉環算法示意圖
3.3 線控轉向高級功能
?駕駛手感定制:
線控轉向(SBW)相比傳統的EPS去掉了中間軸機械連接,而且采用力矩閉環算法對參考手力進行跟蹤,因此可以靈活地設計駕駛手感的風格。相比傳統的EPS通常僅有舒適、標準、運動幾種風格,線控轉向(SBW)具備更多的可性能,甚至可以根據駕駛員的喜好進行定制化調整。
?可折疊方向盤:
傳統的EPS方向盤可調的范圍非常有限,因此及時在自動駕駛(如APA/TJP/HWP等)的工況下,方向盤也會一直隨轉。線控轉向(SBW)取消機械連接之后,駕駛員可以選擇在自動駕駛的場景下把方向盤折疊起來,釋放更多的駕駛艙空間用于休息、娛樂或者工作。
?可變轉向速比:
可變轉向速比功能可以兼顧低車速工況下的靈活性以及高車速工況下的穩定性,或者可以調節方向盤在On-Center、Off-Center區間的轉向靈敏度。傳統的EPS由于存在剛性的機械連接,因此要實現可變轉向速比需要改變機械結構,如齒輪齒條傳動結構、轉向管柱結構,結構和控制復雜且成本較高。而對于線控轉向(SBW),可變轉向速比通過軟件算法就可以實現,具有極大的靈活性,可以在安全范圍內進行靈活的定義,針對不同的場景可以實現最優的駕駛體驗,如賽車模式、舒適模式、運動模式等。
?自動緊急轉向:
自動緊急轉向(Automatic Emergency Steering, AES)是一個在開闊道路下能夠有效避免車輛碰撞的功能,傳統的EPS在實現AES功能時,方向盤要在很短時間內快速轉過一個角度,而此時通常駕駛員的手還在接觸方向盤,因此很容易出現AES功能與駕駛員控制的沖突,甚至引起駕駛員的恐慌。但是對于線控轉向(SBW)系統來說,自動緊急轉向功能激活時,可以在不控制方向盤的情況下在很短的時間內完成緊急避撞的任務,更加安全。
?路面干擾抑制:
線控轉向系統(SBW)移除機械連接的同時也切斷了噪音從輪胎傳遞到駕駛員的路徑,因此可以更好地實現對路面無效干擾信號的抑制,降低機械噪音,讓駕駛艙更加安靜,有效提升駕駛體驗。
?信息娛樂功能:
隨著汽車座艙的智能化程度越來越高,駕駛艙已經成為很多消費者的第二休息空間,具備越來越多的信息娛樂功能。而線控轉向系統(SBW)在移除機械連接之后,方向盤可以單獨作為一個執行器工作,因此可以用來與智能座艙聯動,作為游戲方向盤來使用,并支持力反饋、振動提醒等功能。
4?
小結
線控轉向(SBW)技術相比傳統的EPS具有更高的技術壁壘,開發難度更大、開發成本更高,但是線控轉向(SBW)技術能夠支持L4級以上的自動駕駛功能,并且能夠為汽車帶來很多新的功能,顯著提升駕駛體驗,因此是汽車轉向系統發展的必然趨勢。
隨著線控技術的不斷發展,線控轉向系統(SBW)技術也越來越成熟。主流的轉向供應商博世、采埃孚、耐世特、萬都等都已經完成了SBW產品的開發,并預計在2025年之前完成量產。國內零部件企業相比國際主流的供應商起步較晚,但是在國家戰略的推動下,也在快速地追趕。英創匯智T-SBW解決方案讓汽車更加智能、更加安全、更加具有駕駛樂趣,能夠幫助客戶打造更受消費者喜愛的產品。
審核編輯:彭菁
-
線控
+關注
關注
0文章
15瀏覽量
6840 -
智能汽車
+關注
關注
30文章
2843瀏覽量
107249 -
自動駕駛
+關注
關注
784文章
13784瀏覽量
166399 -
英創匯智
+關注
關注
0文章
28瀏覽量
496
原文標題:高階自動駕駛核心部件:英創匯智線控轉向解決方案
文章出處:【微信號:trinova-tech,微信公眾號:英創匯智】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
為汽車ADAS營造更加安全的行駛環境
物聯網助力樓宇更加環保智能
什么是全方位汽車安全解決方案?
基于HereO提供“即插即用”的物聯網解決方案讓產品變得更加智能化
英創匯智完成最新一輪融資 用于ESC/EPBi、EBooster智能制造基地建設
智能語音吸頂燈解決方案:讓家居更加智能化和智能交互

汽車智能線控技術領航者英創匯智亮相2023 ICVS中國自動駕駛博覽會

線控底盤企業英創匯智連獲兩大獎 英創匯智這個雙十一收獲滿滿






 工商網監
工商網監
評論