") V2X功能測試用例設計及測試分類方法
V2X功能測試用例設計及測試分類方法
汽車行業(yè)中,任何一款產(chǎn)品的上線都離不開測試工作,在整個測試工作中,測試人員通過使用不同的測試技術來創(chuàng)建測試用例,保證測試活動的全面性和高效性。根據(jù)ISTQB可以將測試技術分為黑盒、白盒和基于經(jīng)驗的測試技術:
01常用測試技術分類
黑盒測試技術
黑盒測試技術(behavioral or behavior-based techniques),它不依賴于代碼的實現(xiàn)細節(jié),而是基于測試依據(jù)(如:正式需求文檔、規(guī)格說明、用例、用戶故事或業(yè)務流程)來測試被測對象的正確性和完整性,它關注被測對象的輸入和輸出,而不考慮其內(nèi)部結構。
白盒測試技術
白盒測試技術(structural or structure-based techniques),主要通過對架構、詳細設計、內(nèi)部結構或測試對象代碼進行分析。與黑盒測試技術不同,白盒測試技術關注被測對象的結構和處理過程。
基于經(jīng)驗的測試技術
基于經(jīng)驗的測試技術:利用開發(fā)人員、測試員和用戶的產(chǎn)品經(jīng)驗來設計、實施和執(zhí)行測試。這類技術通常與黑盒和白盒測試技術相結合。
以上是較為常用的測試技術分類,測試人員需要結合具體項目需求和測試目標,選取合適的測試技術來進行測試用例開發(fā)。
目前汽車行業(yè)中使用的V2X(Vehicle to Everything)技術是智能交通系統(tǒng)中的核心技術之一,具有廣泛的應用前景。V2X技術可以讓車輛之間相互通信,實時獲取其他車輛的位置、狀態(tài)、行駛方向等信息,同時也可以獲取周圍道路狀況、交通信號燈、行人等信息,以此來提高駕駛安全性、舒適性和效率。
 02測試用例開發(fā)流程
02測試用例開發(fā)流程
針對基于場景的V2X功能測試來說,測試用例的開發(fā)一般是由黑盒測試技術中的等價類劃分和邊界值分析。等價類劃分和邊界值分析是測試中常用的兩種測試用例設計方法,它們一起使用可以更全面地覆蓋輸入域,在發(fā)現(xiàn)潛在缺陷的同時,也提高了測試的效率。目前,北匯信息在測試用例開發(fā)方面有了完整流程,大致總結為以下幾個步驟:
①識別輸入域:根據(jù)需求文檔、功能規(guī)范或技術協(xié)議等資料,確定需要進行測試的輸入域。
②等價類劃分:將輸入域劃分為若干個等價類,每個等價類代表著一組具有相同特征的輸入值。
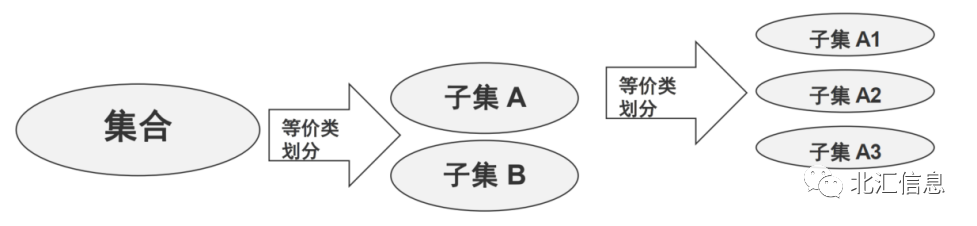
③邊界值分析:對每個等價類,確定其邊界取值并分析。

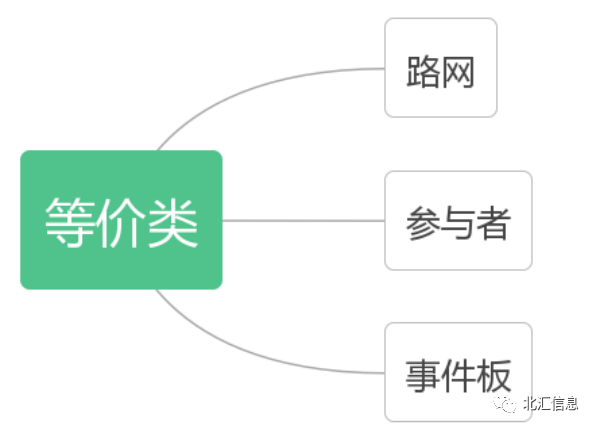
④組合等價類和邊界值:針對測試需求進行功能點整理,主要是提取需求中的等價類,其提取依據(jù)是該等價類是否會對被測件的功能產(chǎn)生影響。等價類分為“路網(wǎng)”、“參與者”、“事件板”。其中,路網(wǎng)是指對場景運行道路的說明,包括:車道類型、車道數(shù)量、標牌類型、信號燈等;參與者指的是場景參與者,包括:車輛、行人和樹木、路燈等物體;事件板是指參與者的行為,包括參與者的初始狀態(tài)和運行過程中的行為變化。初始狀態(tài)包括位置、朝向和速度等。然后將不同等價類中的邊界值組合起來構造測試用例。
⑤設計優(yōu)先級:優(yōu)先級需要考慮:優(yōu)先級需要考慮:功能關鍵性或重要程度、與安全相關的功能、功能完成度、功能當前驗證條件滿足性。根據(jù)測試優(yōu)先級確定測試用例重要程度,并按照優(yōu)先級順序進行篩選測試用例。
下面以《合作式智能運輸系統(tǒng)車用通信系統(tǒng)應用層及應用數(shù)據(jù)交互標準(第一階段)T/CSAE 53-2020》標準中的前向碰撞預警(FCW)場景進行舉例,詳細介紹測試用例開發(fā)方法:
FCW功能定義:主車(HV)在車道上行駛,與在正前方同一車道的遠車(RV)存在追尾碰撞危險時,F(xiàn)CW功能通過HMI對HV駕駛員發(fā)出預警,幫助駕駛員避免或減輕前向碰撞,提高道路行駛安全。
CSAE 53-2020中介紹了以下四種FCW的主要場景。
場景一
HV行駛,RV在HV同一車道正前方停止1)HV正常行駛,RV在位于HV同一車道的正前方停止;2)HV和RV需具備短程無線通信能力;3)HV行駛過程中在即將與RV發(fā)生碰撞時,F(xiàn)CW 應用對HV駕駛員發(fā)出預警,提醒駕駛員與位于正前方的車輛RV存在碰撞危險;4)預警時機需確保HV駕駛員收到預警后,能有足夠時間采取措施,避免與RV發(fā)生追尾碰撞。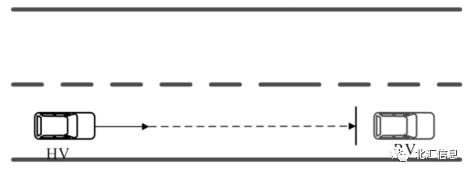
場景二
HV 行駛,RV 在HV相鄰車道前方停止1)HV正常行駛,RV 在位于HV相鄰車道的前方停止;2)HV和RV需具備短程無線通信能力;3)HV行駛過程中不會與RV發(fā)生碰撞,HV 駕駛員不會收到 HMI 發(fā)出的FCW預警信息。
場景三
HV 行駛,RV 在HV同一車道正前方慢速或減速行駛1)HV正常行駛,RV 位于HV同一車道的正前方慢速或減速行駛; 2)HV和RV需具備短程無線通信能力; 3)HV行駛過程中在即將與RV發(fā)生碰撞時,F(xiàn)CW 功能通過HMI對HV駕駛員發(fā)出預警,提醒駕駛員與位于正前方的車輛RV存在碰撞危險; 4) 預警時機需確保HV駕駛員收到預警后,能有足夠時間采取措施,避免與RV發(fā)生追尾碰撞。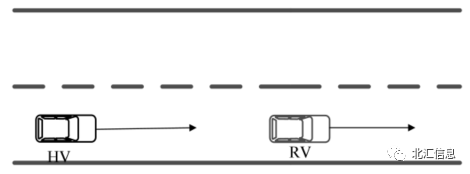
場景四
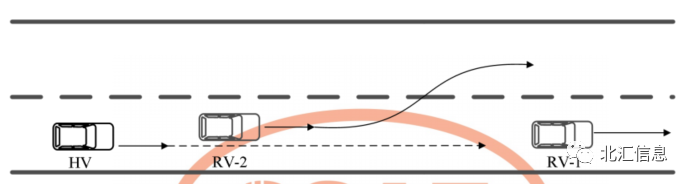
HV行駛,HV視線受阻,RV-1在HV同一車道正前方停止
1)HV跟隨RV-2正常行駛,RV-1在同一車道上RV-2的正前方停止,HV的視線被RV-2所遮擋;
2)HV和 RV-1 需具備短程無線通信能力,RV-2 是否具備短程無線通信能力不影響功能場景的有效性;
3)RV-2為了避開RV-1進行變道行駛;
4)HV行駛過程中在即將與RV-1發(fā)生碰撞時,F(xiàn)CW功能通過HMI對HV駕駛員發(fā)出預警,提醒駕駛員與 位于正前方的RV-1存在碰撞危險;
5)預警時機需確保HV駕駛員收到預警后,能有足夠時間采取措施,避免與 RV-1發(fā)生追尾碰撞。
 根據(jù)以上場景,將對FCW功能產(chǎn)生影響的因素通過等價類劃分和邊界值分析方法將其分為路網(wǎng)、參與者、事件板,分類如下圖所示。
根據(jù)以上場景,將對FCW功能產(chǎn)生影響的因素通過等價類劃分和邊界值分析方法將其分為路網(wǎng)、參與者、事件板,分類如下圖所示。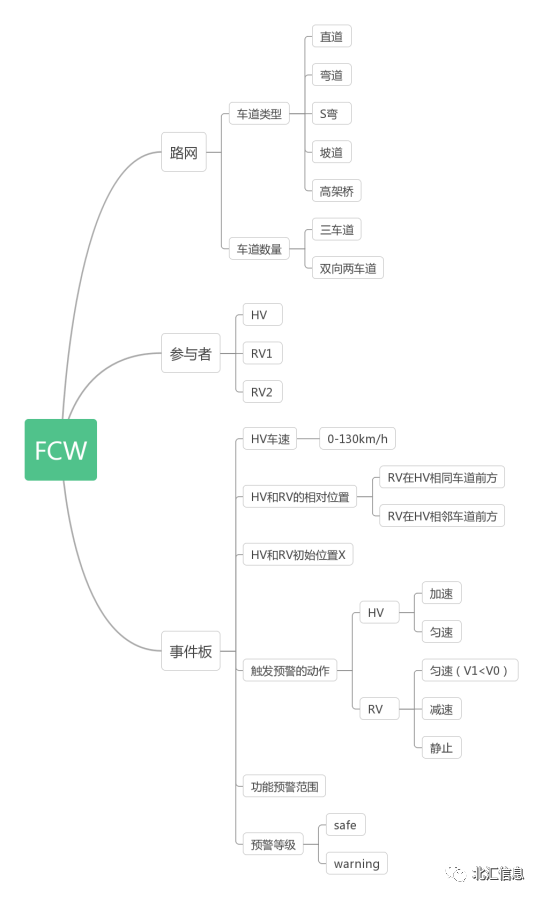 結合FCW功能文檔以及測試的優(yōu)先級對其組合的case進行篩選整理,最后生成完整的測試用例。
結合FCW功能文檔以及測試的優(yōu)先級對其組合的case進行篩選整理,最后生成完整的測試用例。
03總結
根據(jù)以上測試用例開發(fā)流程可以提高被測系統(tǒng)的覆蓋面,進而提高測試的有效性和全面性,能夠更全面地發(fā)現(xiàn)潛在的缺陷和問題,保障被測件功能健全。
北匯信息作為蜂窩車聯(lián)(C-V2X)工作組成員,持續(xù)深耕 V2X 測試領域,測試方案覆蓋終端接入層一致性、協(xié)議棧一致性、場景功能測試和信息安全測試等,為客戶提供專用測試設備、成熟的測試解決方案和測試服務,讓汽車變得更安全、更舒適、更智能。
-
測試
+關注
關注
8文章
5269瀏覽量
126599 -
HMI
+關注
關注
9文章
587瀏覽量
48539 -
V2X
+關注
關注
25文章
209瀏覽量
43513 -
汽車
+關注
關注
13文章
3493瀏覽量
37252
發(fā)布評論請先 登錄
相關推薦
基于V2X和自動駕駛HIL聯(lián)調(diào)的仿真測試系統(tǒng)開發(fā)

如何應對V2X頻譜挑戰(zhàn)
什么是回歸測試_回歸測試的測試策略
emc有哪些測試方法和分類方法
設計仿真 | 基于VTD的V2X仿真應用

端到端測試用例怎么寫
鑒源實驗室·ISO 26262中測試用例的得出方法-等價類的生成和分析
功能測試主要做什么 功能測試包含哪些測試
LitePoint與三星電子合作支持FiRa 2.0物理層安全測距測試用例
DEKRA被CSA指定為Zigbee統(tǒng)一測試工具開發(fā)和優(yōu)化新功能和測試用例
基于實車在環(huán)(ViL)的V2X測試方法

羅德與施瓦茨聯(lián)合Autotalks成功驗證第三代V2X芯片組性能
PTCRB的測試用類認證等級分類介紹

V2X與ETC到底有什么不同?
德思特分享丨V2X在做什么?連接未來智能出行的車聯(lián)網(wǎng)(下)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論