 直驅電機選型與應用指南(三)
直驅電機選型與應用指南(三)
12、準確性和可重復性
間隙和剛性也有助于機構的定位精度和可重復性。精度是衡量偏離理想狀況的指標。例如,如果命令機器移動90度,它是否正好移動90.000 度?或者如果你從外部測量,它是否只移動了89.999度?通常更重要的是可重復性,也稱為精度。
如果指令為90.000時,機器可以重復移動89.999,那么就調整指令,直到重復移動到所需的位置。
控制系統測量編碼器的位置。剛性和間隙給這些測量增加了不確定性因素。此外,齒輪箱或皮帶系統的制造過程也會影響精度和可重復性。只有采用自然設計的直接驅動電機,才能直接測量負載并移動負載,而不會出現旋轉驅動變速器中存在的間隙和柔性問題。
13、全閉環運行
如果應用需要,為什么不通過在負載上添加旋轉編碼器來補償齒輪箱或皮帶傳動裝置的間隙和剛性?是的,這是可能的,業內使用的一個術語是全閉環。
全閉環運行允許旋轉電機的位置環,通過直接安裝在負載上的附加旋轉編碼器來閉合。這提高了可重復性和精確性,但對提高剛性、穩定時間和磨損沒有太大作用。由于會顯著增加成本和復雜性,所以很少會像這樣添加外部旋轉編碼器。
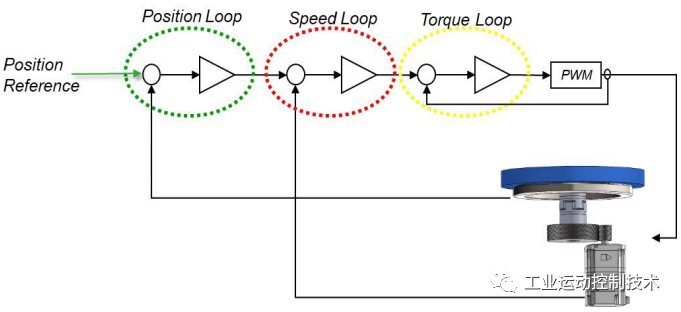
▲全閉環允許旋轉電機的位置環,通過直接安裝在負載上的附加旋轉編碼器來閉合。這提高了可重復性和準確性,但對提高剛性、穩定時間和磨損沒有太大作用。
14、穩定時間對機器的影響
實際上,機器可能會由于穩定時間性能不佳而浪費錢,在伺服電機選型過程中很少會考慮這一點。在圖 14所示的裝置中,具有相似功率容量的直接驅動電機和齒輪電機,以相同的運動曲線運行相同的負載。
行星齒輪減速比為 50:1,額定間隙小于5弧分。移動曲線要求兩個電機在接近其峰值扭矩額定值時加速和減速,并且 RMS 扭矩剛好低于連續額定值。兩臺電機都經過調諧,直到電機編碼器測量的穩定時間接近 50 毫秒。在兩個裝置中,外部環形編碼器都安裝在負載上,以從外部測量負載位置以進行分析。這揭示了由齒輪電機驅動負載中的振蕩,否則電機的編碼器看不到這些。
在直接驅動電機上,兩個編碼器報告的位置始終基本相同。在齒輪電機上,您會看到負載在最終減速期間位于編碼器之前,并在移動結束時振蕩。
這種低頻振蕩源于齒輪箱的間隙和柔性,而不是負載本身的振蕩。直到大約 130 毫秒,它才會穩定在 0.05 度以內。電機編碼器不會顯示這種振蕩,因此在編程序列中需要額外的延遲來等待它穩定下來。
讓我們將這個案例研究置于真實應用場景中,看看帶來的實際效益情況(以美元表示)。假設這臺機器代表一個生產小部件的 8 站分度工作臺。理論上,每一個45 度分度,都在 200 毫秒內完成移動,位置公差為 0.05 度。然后在每個站,有一個持續2 秒的外部工作過程。在最后一站,生產一個小部件,帶來 50 美分的收入。
直接驅動系統的周期為 2225 毫秒,每小時產生 809 美元的收入。由于穩定時間較長,齒輪電機需要兩個 2305 毫秒,每小時產生 772 美元的收入。每小時 37 美元的差異,似乎并不大。但再仔細算一算,8小時輪班的差價為 293 美元,每周工作 5 天的差價接近 1500 美元,每年的差價超過 73,000 美元。即使每個小部件的收入只有 10 美分,這臺機器仍然可以在相同的運營時間內每年多產生近15,000美元的收入。本案例研究說明:在為應用選型和選擇伺服電機時,考慮可實現的穩定時間的影響是多么重要。
15、直驅電機的磨損和維護
磨損和維護也是機器性能需要考慮的一部分因素。在直接驅動電機中,主電機軸承是唯一的摩擦和磨損點。這些電機軸承的規格通常適用于極重的負載。齒輪箱和皮帶傳動裝置的其它運動部件都會磨損,可能需要潤滑或其它定期維護。
與直接驅動電機相比,可聽見的噪音也更大。隨著它們的磨損,這些基于傳動機構的性能開始下降。間隙和剛性每天都會變得更糟。期望的位置穩定時間、準確性和可重復性也會隨著時間的推移而不斷下降。
16、低速旋轉伺服應用的設計注意事項
一般在設計低速、旋轉伺服應用時,強烈建議考慮直接驅動電機。前期成本很容易被性能的提高、設計的簡單性和維護的便利性所抵消。以下是設計時的一些注意事項。
首先,請記住直接驅動電機上的軸承很堅固,可以支撐整個負載的重量。不需要額外的軸承,就像使用齒輪箱或皮帶傳動時一樣。這節省了整個系統的部件成本、設計、工程和維護。
到目前為止,關于剛性的討論僅僅限于傳動部件。然而,機器本身的剛性也發揮了作用。直接驅動電機的穩定性,取決于負載和轉子之間的剛性連接,以及從定子到機器底座的剛性連接。
轉接板和框架結構件必須盡可能堅固。在直接驅動電機施加的極端扭矩下,看起來剛性的東西,可能也會彎曲和偏轉。在任何應用中,不僅僅是直接驅動電機,安裝框架和負載板都可能成為機器振動的來源。
最后,考慮采用超大齒輪電機解決方案來降低直接驅動電機的初始成本,目的是通過編程實現更快的移動來補償較長的穩定時間,這種方案可能很誘人。
但請記住,更快的加速需要更大的扭矩,因此需要更大的放大器、聯軸器和變速器,還可能需要改變機器的框架。確保不要超過負載本身或運動中零件和組件的限制。雖然在相同負載下更大的電機會導致更低的慣量比,但諧振和反諧振頻率會降低,并且更有可能導致振蕩和調諧復雜化。
使用直接驅動電機解決低速旋轉伺服應用,可避免隱藏的初始成本,同時可以在機器的整個生命周期內提供卓越和穩定的性能,從長遠來看可以節省成本。
-
編碼器
+關注
關注
45文章
3648瀏覽量
134744 -
測量
+關注
關注
10文章
4885瀏覽量
111478 -
直驅電機
+關注
關注
1文章
40瀏覽量
3762
發布評論請先 登錄
相關推薦
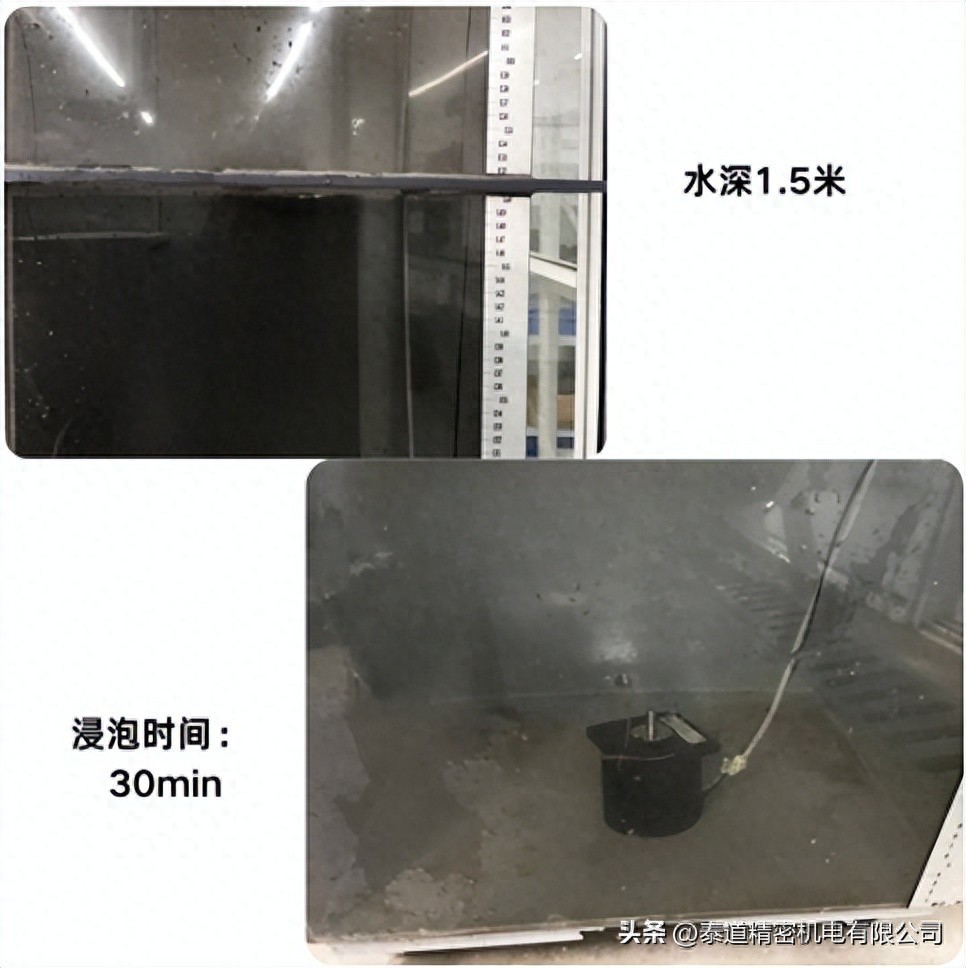
雅科貝思直線電機,IP68 高防護等級直驅旋轉電機專為在水下或潮濕環境中運作而設計

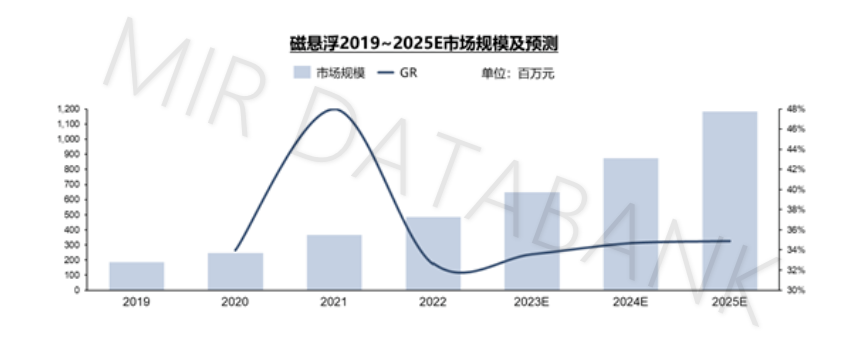
2030年全球微型直驅電機產值預計達到3869百萬美元

自動化設備的伺服電機選型指南
bldc變頻電機和fpa直驅變頻電機區別
bldc變頻電機是皮帶嗎 bldc電機是皮帶還是直驅
bldc變頻電機和直驅變頻電機區別與聯系是什么
創新引領,「智」驅未來--Regal Rexnord發布SmartDrive雷勃智驅永磁直驅產品全平臺

先進工控方案一站配齊!柔性高效磁懸浮傳輸、直驅方案……






 工商網監
工商網監
評論