 全球導航衛星系統GNSS包括哪些
全球導航衛星系統GNSS包括哪些
本文有近萬字,主要是衛星定位技術相關學習筆記,內容沒有精煉,排版也懶得搞了,請各位讀者按需取用,謝謝。 文檔目錄: 1.GNSS簡介:全球衛星概述 2.SBAS簡介:星基增強系統概述 3.定位原理:衛星定位原理簡介 4.衛星定位幾個常用知識點
a)導航系統不同頻段的工作頻率
b)定位NMEA數據解析
c)導航系統工作頻率
d)AGPS(秒定)簡介
e)衛星星歷
f)幾何精度因子
g)定位的準確度和精度指標
5.雙頻GNSS簡介:L1、L2、L5多頻GNSS 6.差分GNSS(RTD、RTK)
a)衛星定位的誤差來源
b)差分GPS定位原理
7.地理坐標系:WGS-84和GCJ-02 01 全球導航衛星系統(GNSS)
GNSS是全球導航衛星系統(Global Navigation Satellite System),它是一種利用衛星進行導航和定位的技術體系。GNSS系統通過在地球軌道上部署一組衛星,為全球范圍內的用戶提供定位、導航、定時和通信等服務。這些衛星發射信號,由接收器接收并計算出位置信息。
目前主要的全球導航衛星系統包括:
GPS(Global Positioning System):GPS是在美國海軍導航衛星系統的基礎上發展起來的無線電導航定位系統。具有全能性、全球性、全天候、連續性和實時性的導航、定位和定時功能,能為用戶提供精密的三維坐標、速度和時間。現今GPS共有在軌工作衛星31 顆,其中GPS-2A衛星10顆,GPS-2R衛星12顆,經現代化改進的帶M碼信號的GPS-2R-M和GPS-2F衛星共9顆。
GPS只是GNSS的一種,大家容易把GPS代指衛星定位,其實全球導航衛星系統還包括:
GLONASS(Global Navigation Satellite System):GLONASS是由原蘇聯國防部獨立研制和控制的第二代軍用衛星導航系統,該系統是繼GPS后的第二個全球衛星導航系統。GLONASS系統由衛星、地面測控站和用戶設備三部分組成,系統由21顆工作星和3 顆備份星組成。
Galileo:Galileo是由歐盟研制和建立的全球衛星導航定位系統,該計劃于1992年2月由歐洲委員會公布,并和歐空局共同負責。系統由30顆衛星組成,其中27顆工作星,3顆備份星。
最強我國北斗。(以下來自百度百科)
BeiDou(北斗導航系統,Beidou Navigation Satellite System,簡稱:BDS,又稱為:COMPASS,中文音譯名稱:BeiDou)是中國自行研制的全球衛星導航系統,也是繼GPS、GLONASS之后的第三個成熟的衛星導航系統。北斗衛星導航系統(BDS)和美國GPS、俄羅斯GLONASS、歐盟GALILEO,是聯合國衛星導航委員會已認定的供應商 。
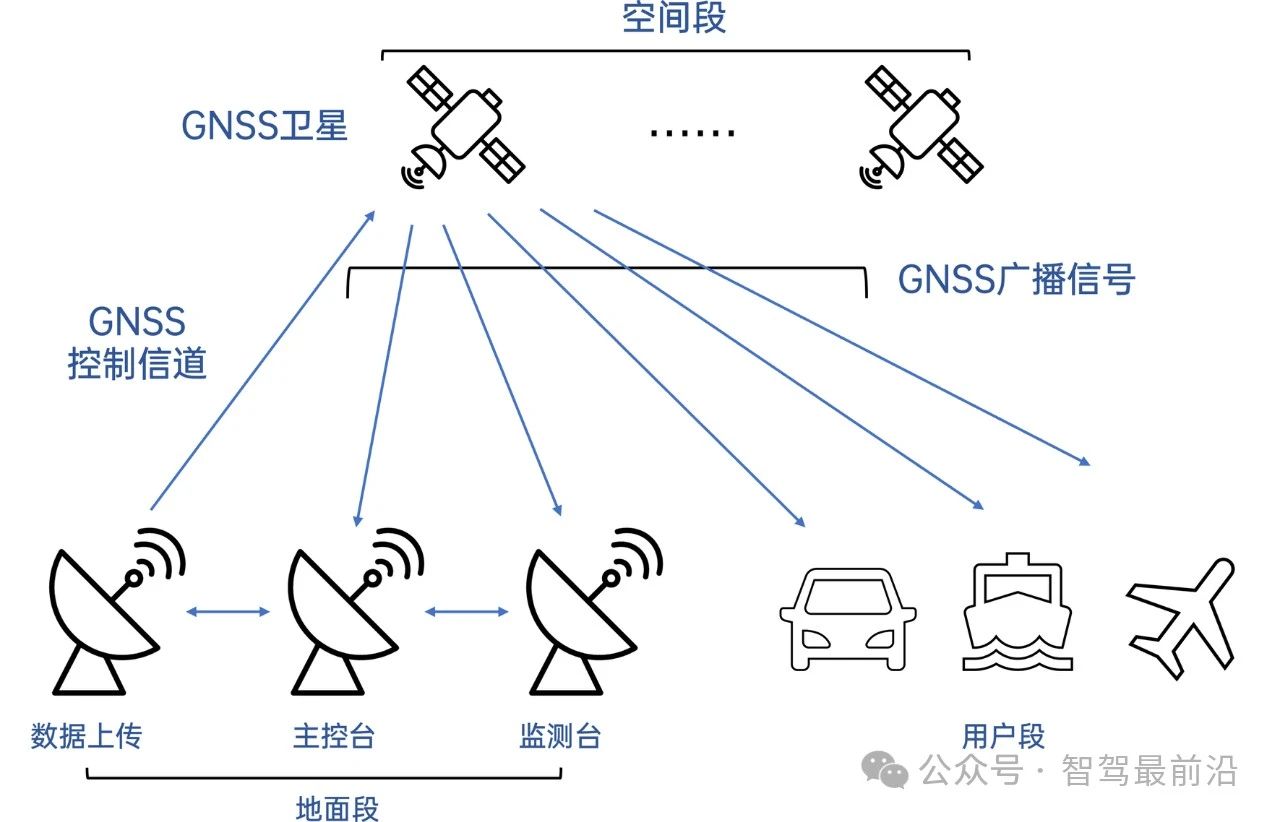
北斗衛星導航系統由空間段、地面段和用戶段三部分組成,可在全球范圍內全天候、全天時為各類用戶提供高精度、高可靠定位、導航、授時服務,并且具備短報文通信能力,已經初步具備區域導航、定位和授時能力,定位精度為分米、厘米級別,測速精度0.2米/秒,授時精度10納秒。2023年5月17日10時49分,中國在西昌衛星發射中心用長征三號乙運載火箭,成功發射第五十六顆北斗導航衛星。
全球范圍內已經有137個國家與北斗衛星導航系統簽下了合作協議。隨著全球組網的成功,北斗衛星導航系統未來的國際應用空間將會不斷擴展。
另外,還有兩個區域覆蓋的衛星導航系統。
NAVIC(Navigation with Indian Constellation):是印度空間研究組織(ISRO)開發的獨立衛星導航系統。它是為了滿足印度國內和周邊地區的導航和定位需求而創建的。NavIC系統包括七顆衛星,其中包括一個地球靜止軌道衛星(GEO)和六顆地球傾斜軌道衛星(IRNSS)。
QZSS(Quasi-Zenith Satellite System):是由日本國家空間開發局(JAXA)和其他相關機構開發的系統。QZSS的目標是提供高精度的導航和定位服務,特別是在城市和高樓大廈等密集城區,以提高GNSS信號的可靠性。QZSS系統包括多顆衛星,其中至少有一個衛星位于準天頂位置,可以在特定地區提供更強的信號強度。QZSS系統與GPS系統相互兼容,可以提供更好的信號質量和精度,特別是在城市環境中。
02 星基增強系統(SBAS)
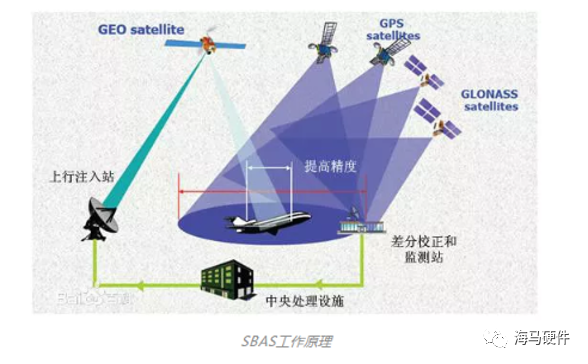
為了提高衛星定位精度,各國還推出了自己的衛星增強系統(SBAS)。SBAS(Satellite-Based Augmentation System)是一種用于提高衛星導航系統的精度、可靠性和可用性的技術體系。它通過部署地面基站和地面監測設施,利用地球靜止軌道(GEO)衛星搭載衛星導航增強信號轉發器,可以向用戶播發星歷誤差、衛星鐘差、電離層延遲等多種修正信息,實現對于原有衛星導航系統定位精度的改進。
幾個典型的衛星增強系統包括:
WAAS(Wide Area Augmentation System):是美國的衛星增強系統,為航空導航提供增強服務。
EGNOS(European Geostationary Navigation Overlay Service):是歐洲的衛星增強系統,用于提供更好的航空和陸地導航服務。
MSAS(Multi-functional Satellite Augmentation System):是日本的衛星增強系統,主要用于航空和陸地交通導航。
GAGAN(GPS Aided GEO Augmented Navigation):是印度的衛星增強系統,旨在提供更準確的航空導航服務。
BDSBAS北斗系統增強系統:包括地基增強系統與星基增強系統。
這些衛星增強系統在全球范圍內提供增強的導航和定位服務,為用戶提供更高精度、更可靠的位置信息,促進了多個領域的技術發展和應用創新。
03 定位原理
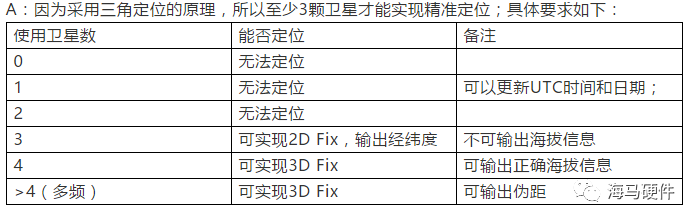
衛星定位是一種基于三角測量原理的技術,通過測量接收器與多顆衛星之間的信號傳播時間,來計算接收器的位置坐標。衛星在離地面2萬多千米的高空上,以固定的周期環繞地球運行,使得在任意時刻,在地面上的任意一點都可以同時觀測到4顆以上的衛星。
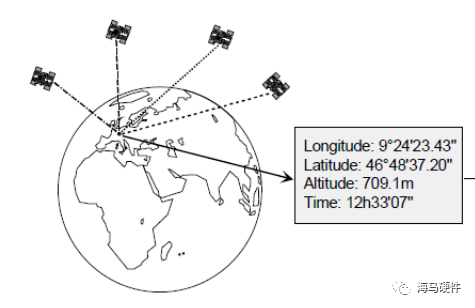
由于衛星的位置精確可知,在接收機對衛星觀測中,我們可得到衛星到接收機的距離,利用三維坐標中的距離公式,利用3顆衛星,就可以組成3個方程式,解出觀測點的位置(X,Y,Z)。考慮到衛星的時鐘與接收機時鐘之間的誤差,實際上有4個未知數,X、Y、Z和鐘差,因而需要引入第4顆衛星,形成4個方程式進行求解,從而得到觀測點的經緯度和高程。事實上,接收機往往可以鎖住4顆以上的衛星,這時,接收機可按衛星的星座分布分成若干組,每組4顆,然后通過算法挑選出誤差最小的一組用作定位,從而提高精度。
 衛星定位實施的是“到達時間差”(時延)的概念:利用每一顆衛星的精確位置和連續發送的星上原子鐘生成的導航信息獲得從衛星至接收機的到達時間差。衛星在空中連續發送帶有時間和位置信息的無線電信號,供接收機接收。由于傳輸的距離因素,接收機接收到信號的時刻要比衛星發送信號的時刻延遲,通常稱之為時延,因此,也可以通過時延來確定距離。衛星和接收機同時產生同樣的偽隨機碼,一旦兩個碼實現時間同步,接收機便能測定時延,將時延乘上光速,便能得到距離。
衛星定位實施的是“到達時間差”(時延)的概念:利用每一顆衛星的精確位置和連續發送的星上原子鐘生成的導航信息獲得從衛星至接收機的到達時間差。衛星在空中連續發送帶有時間和位置信息的無線電信號,供接收機接收。由于傳輸的距離因素,接收機接收到信號的時刻要比衛星發送信號的時刻延遲,通常稱之為時延,因此,也可以通過時延來確定距離。衛星和接收機同時產生同樣的偽隨機碼,一旦兩個碼實現時間同步,接收機便能測定時延,將時延乘上光速,便能得到距離。
04 衛星定位幾個常用知識點
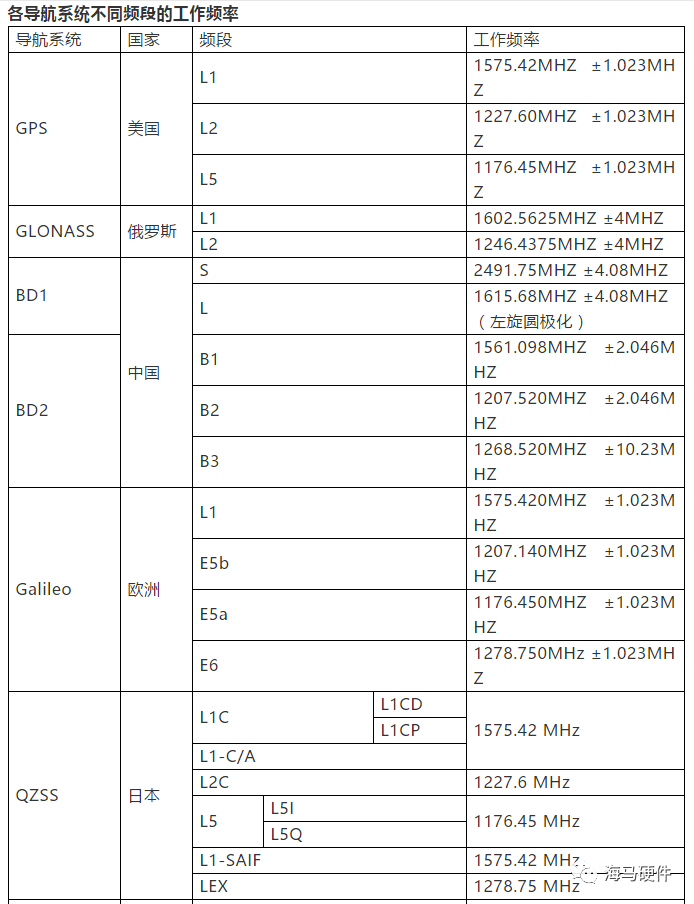
1.各導航系統不同頻段的工作頻率
2.定位NMEA數據解析
NMEA(National Marine Electronics Association)是一個標準化的數據通信協議,用于在航海和導航設備中傳輸位置信息、時間數據和其他相關信息。NMEA-0183,是GPS接收機應當遵守的標準協議,也是目前GPS接收機上使用最廣泛的協議,大多數常見的GPS接收機、GPS數據處理軟件、導航軟件都遵守或者至少兼容這個協議。
常見的NMEA消息類型包括:
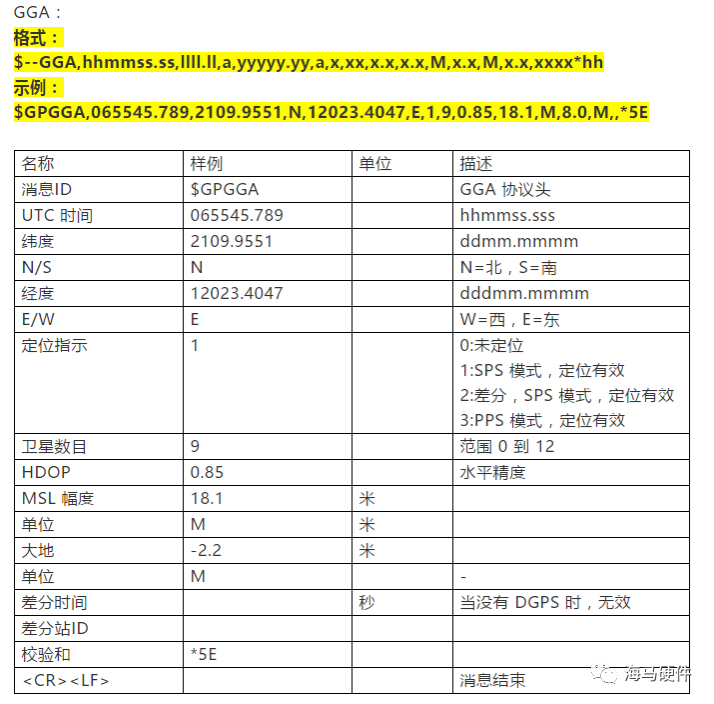
$GPGGA:包含全球定位系統(GPS)的定位數據,如緯度、經度、定位質量等。
$GPGLL:包含緯度和經度,以及定位狀態。
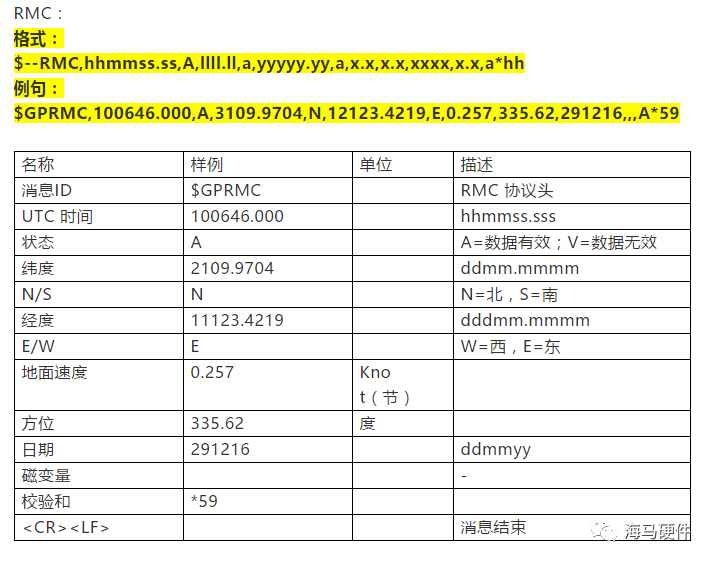
$GPRMC:包含推薦的最小定位數據,如地面速度、地面航向等。
$GPVTG:包含地面速度和地面航向數據。
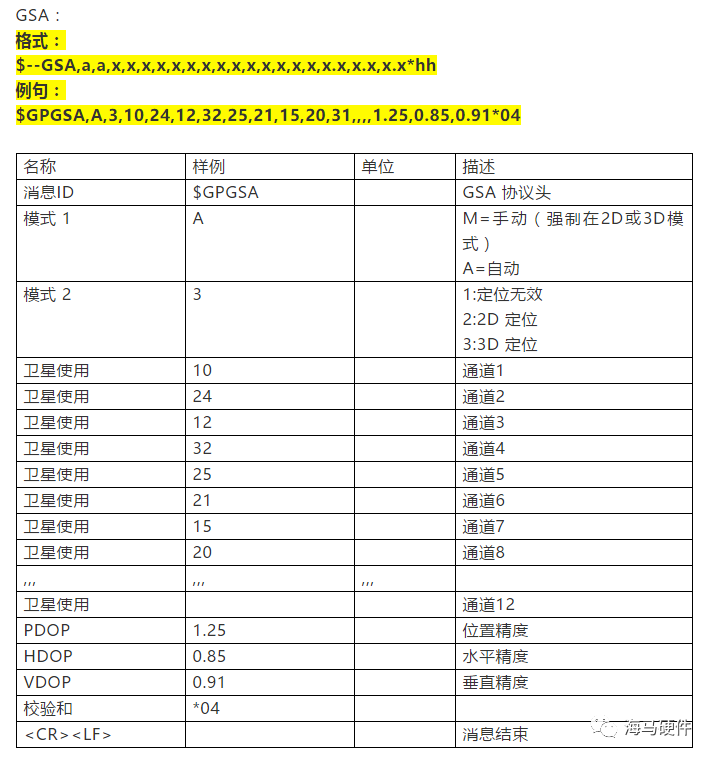
$GPGSA:包含GNSS接收機的定位狀態以及使用的衛星信息。
$GPGSV:包含衛星的可視信息,提供當前可視衛星的編號、高度角、方位角和信噪比等。
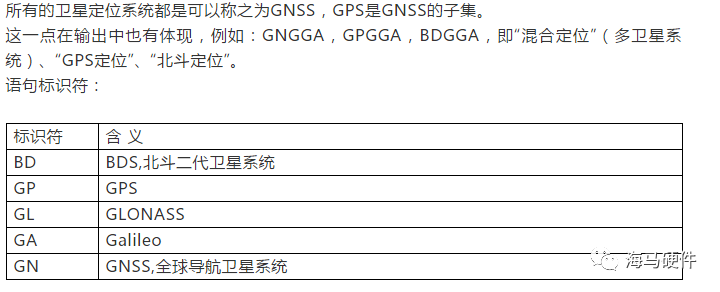
目前國內多模接收機輸出語句,針對北斗定位系統增加了$BD和$GN等前綴。
$GPGGA示例
$GPRMC示例
$GPGSA示例
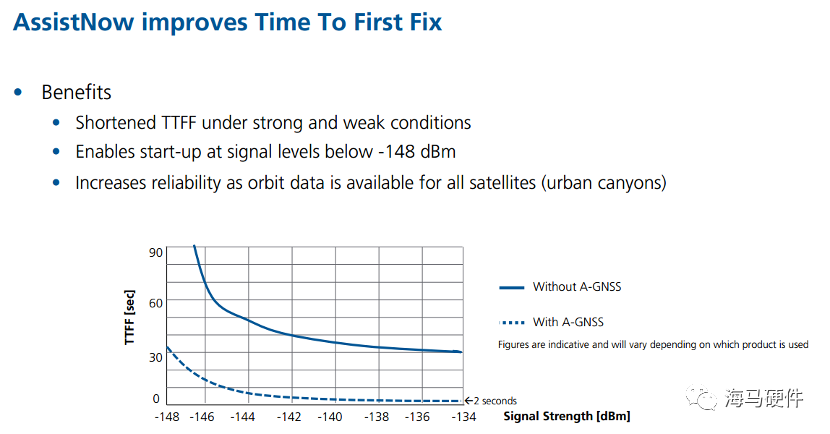
3.AGPS(秒定)簡介
AGPS(Assisted Global Positioning System)輔助全球衛星定位系統,是一種GPS的運行方式。它可以利用手機基地站的資訊,配合傳統GPS衛星,讓定位的速度更快。
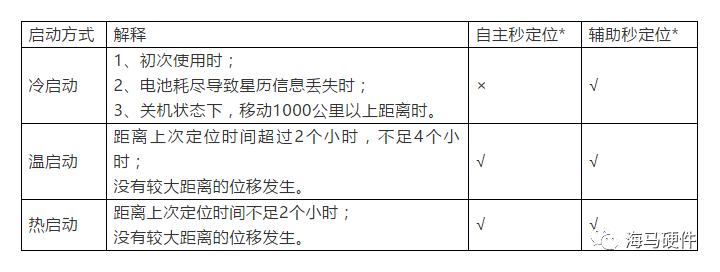
自主秒定位:根據模塊內保存的星歷,實現快速搜星、定位。
輔助秒定位:使用AGPS輔助,實現快速搜星、定位。
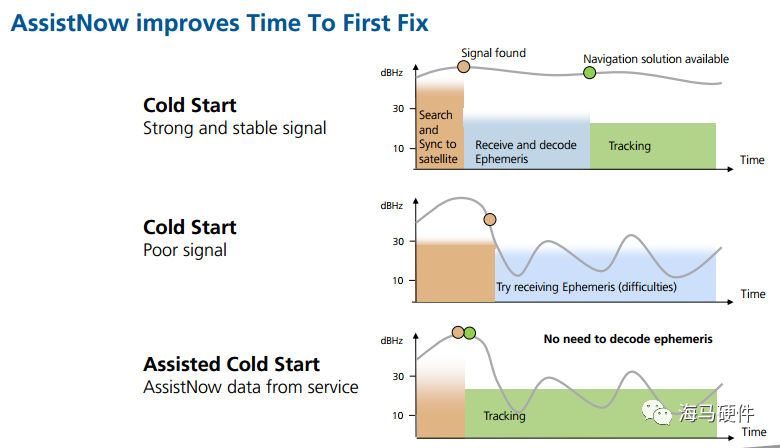
在傳統GPS定位方式中,定位模塊需要全頻段搜索以找到可用衛星,因而耗時較長。而“AGPS輔助定位”方式,是通過網絡直接下載當前地區的可用衛星星歷數據,并將之發送給定位模塊,定位模塊只搜索特定的衛星,從而提高了搜星速度,減少設備耗電。
AGPS輔助定位的使用條件:
衛星信號接收條件必須良好,至少可觀測到4顆衛星;
定位芯片必須支持AGPS輔助定位;
必須可以準確獲取當前地區星歷數據;
如果是冷啟動,需要等待通信芯片附著成功,接收到星歷數據后,傳輸給定位模塊;
如果是溫啟動/熱啟動,亦需要重新搜星;
AGPS輔助定位基本流程:
1、設備從蜂窩基站獲取到當前位置的小區信息; 2、設備通過蜂窩網絡,將當前蜂窩小區信息傳送給網絡中的AGPS位置服務器; 3、APGS位置服務器根據當前小區信息查詢該區域當前可用的衛星信息(包括衛星的頻段、方位、仰角等相關信息),生成對應星歷文件,并返回給設備; 4、通信模塊通過串口把收到的星歷文件傳輸給定位模塊; 5、定位模塊根據星歷文件,得到的可用衛星信息,快速找到當前可用的GPS衛星,針對性的搜星,大大提升定位時間
AGPS輔助定位只能加快定位速度,無法提升定位精度。
如何判斷AGPS寫入?看GGA、RMC的UTC時間是否被修正,看GSV數據是否生成;
AGPS輔助定位的星歷文件大概幾K字節。星歷文件是否需要定期更新,更新頻率是多少?
需要根據自己的情況進行分析。如果是冷啟動后,不關閉定位模塊,下載一次“AGPS輔助定位”數據(星歷文件)即可。運行中,定位模塊內會自動生成對應的星歷文件,無需重復下載;
如果是不定時啟動、關閉,那么關閉4小時內啟動是沒必要更新的(“溫啟動”范疇);如果大于4小時,模塊內保存的星歷已失效,則必須更新星歷文件(重新下載),否則和“冷啟動”無異。
4.GPS衛星星歷
衛星軌道信息或某一時刻軌道參數及其變率或某一時刻衛星位置及其變化率。分為預報星歷(又叫廣播星歷)和后處理星歷(精密星歷)。
1)GPS廣播星歷:包括某一參考歷元的軌道及其攝動改正項參數。共有16個參數。用C/A碼傳送的星歷叫C/A碼星歷,精度為數十米。
2)后處理星歷:用P碼傳送的星歷叫P碼星歷,叫做精密P碼星歷,精度為5米。用于軍事目的。大部分用戶得不到。一些國家某些部門根據各自跟蹤衛星的精密觀測資料來計算出的星歷。事后提供給用戶。
星歷下載和星歷預測:星歷預測功能是指在信號正常(CN值大于27)的情況下,硬件連續運行5~10分鐘,即可在內部自動生成星歷,并預測出未來2~3天的星歷,此過程不需要耗費任何流量。實現“通電5分鐘,奔跑72小時”。
星歷預測條件:
1、星歷被下載過一次(外部輸入給GPS芯片星歷文件,或者GPS芯片自主3D Fix);
2、GPS信號CN值不低于27;
3、正常定位過一次;
4、RTC不掉電(當主電源斷開后,只有RTC電源不斷,星歷預測功能才可以使用,RTC斷開后星歷預測功能將不再起作用);
早期,服務器下發的星歷文件是包含全部所有的可見衛星數據,將之發給GPS芯片,GPS芯片再根據星歷文件去搜星。缺點是星歷文件大,定位效果較差。
現在,首先是使用通信芯片進行基站定位,后臺獲取一個粗略的地理位置,查詢導航電文后,再根據該地理位置精確下發當前可見衛星星歷,GPS芯片再根據精確的星歷文件去針對性地搜星。星歷文件體積更小,定位效果更好。
“星歷預測”是芯片自動生成的,僅包含可見衛星的星歷,而“星歷下載”是包含全部可見(但是不可用)衛星的星歷。
目前使用星歷下載的方式居多,“星歷預測”的前提是在“信號正常(CN值大于27)的情況下,連續運行5-10分鐘”,工作電流較大,相對比較耗電。所以大多數應用會傾向于每次都進行“星歷下載”,而非使用“星歷預測”——何況通過基站定位獲取大概位置的動作,本身就需要蜂窩聯網服務器。
5.幾何精度因子(DOP)
幾何精度因子(DOP,Dilution of Precision)是一組用于衡量衛星定位系統(如GPS、GLONASS、Galileo等)定位精度的參數。它們用于評估衛星的分布、幾何關系以及接收器在特定位置的觀測情況,從而預測定位誤差的可能性。DOP值越小,定位精度越高。常見的DOP因子包括:
PDOP(Position Dilution of Precision):位置精度因子。它考慮了衛星在天空中的分布情況,即衛星的幾何配置對于位置估計的影響。PDOP越小,定位精度越高。當衛星接近接收器的天頂方向時,PDOP最小。
HDOP(Horizontal Dilution of Precision):水平精度因子。它衡量了水平位置精度的影響因素,即接收器在水平方向上的幾何精度。HDOP越小,水平定位精度越高。
VDOP(Vertical Dilution of Precision):垂直精度因子。它考慮了垂直方向上的幾何精度,即接收器的垂直位置估計的可靠性。VDOP越小,垂直定位精度越高。
TDOP(Time Dilution of Precision):時間精度因子。它表示衛星鐘的不精確度對定位的影響。較大的TDOP值可能會導致定位的時間誤差。
GDOP(Geometric Dilution of Precision):幾何精度因子。它是PDOP、HDOP和VDOP的綜合,用于評估整體的定位精度。較小的GDOP值表示更好的定位精度。
DOP因子是幫助用戶理解衛星分布和接收器位置對定位精度的影響的重要指標。通過了解和控制這些因子,可以優化衛星定位系統的使用,提高定位的精確性和可靠性。
6.定位的準確度和精度指標
在GNSS定位中,準確度(Accuracy)和精度(Precision)是兩個重要的指標,它們涉及到定位結果的質量和可靠性。盡管兩者經常被混淆使用,但它們有著不同的定義和含義:
GNSS定位準確度(Accuracy): 定位結果與實際位置之間的差距,即定位結果的接近程度。準確度越高,定位結果與真實位置的差距越小。例如,如果一個定位系統的準確度為1米,意味著定位結果的平均誤差在1米以內。
GNSS定位精度(Precision):定位結果的穩定性和重復性,即多次測量的結果是否接近,主要看測試結果的重復性指標。精度越高,定位結果之間的變異越小。精度通常用于描述定位結果的一致性和可信度。例如,如果一個定位系統的精度為10厘米,表示多次測量的結果之間的變異在10厘米以內。
可以通過以下類比更好地理解準確度和精度之間的關系:
假設你射箭,目標是靶心。如果你的箭全部都落在靶心附近,但都不在一起,較為離散,這說明你的結果有高的準確度但低的精度。如果你的箭都落在靶心附近,并且都很接近一起,較為集中,這說明你的結果有高的準確度和高的精度。如果你的箭都離靶心遠,這說明你的結果既沒有高的準確度也沒有高的精度。
在定位領域中,RMS(Root Mean Square)和CEP(Circular Error Probable)是兩個常用的指標,用來衡量定位結果的準確度和精度。
RMS(Root Mean Square):RMS是定位誤差的均方根,是測量值的平均誤差的平方根,反映了定位誤差的平均大小,屬于準確度指標。
計算方式:
1.對每個定位測量值求其與真實位置的誤差(偏差)。 2.將每個誤差的平方值相加。 3.將平方和除以定位測量值的數量(或樣本數)。 4.對上述結果取平方根,即得到RMS值。
CEP(Circular Error Probable):CEP是一個圓形區域,其中包含了定位結果中一定百分比(通常是50%)的測量值。它表示定位結果一致性,屬于精度指標。
計算方式:
1.將定位測量值按誤差大小進行排序。 2.找到使累積百分比達到設定百分比(通常是50%)的誤差值,該誤差值就是CEP。 RMS 更注重平均誤差的測量,而 CEP 更關注在特定概率下的測量誤差范圍。 05 雙頻GNSS簡介
1994 年,GPS 全面進入正常運行,民用信號采用 L1(頻率 1575.42 MHz)單頻 C/A 碼,并附加選擇可用性(SA)人為干擾,位置精度約為 100m,授時精度約為 340ns。2000 年 5 月 1 日,美國政府宣布撤銷對 GPS 的 SA 干擾技術,民用信號定位 服務精度提高到 20m,授時精度提高到 40ns。近年來,為了進一步加強 GPS 在全球民用導航市場的競爭力,美國政府決定 對 GPS 民用信號作出重大調整,引入三種新的民用信號 L2C 和 、L1C、 L5。其中 L2C 是最早投入使用的,2005 年 9 月發射的 Block IIR—M 2012 號衛星最先開始播發。L5 在 2007 年發射的 Block IIF 才開始使用。L1C 則更晚,它是 GPS III 代改進的 內容,將最終取代現有的 L1 C/A 信號。
如前面所述,GPS信號工作頻率分為了L1、L2、L5等幾個波段:
L1波段:1575.42MHz±1.023MHz
L2波段:1227.60MHz±1.023MHz
L5波段:1176.45MHz±1.023MHz
以往的GPS定位均采用L1波段,是單頻定位方式。目前已有多款GPS芯片可以同時使用雙頻波段(如L1+L5)進行定位,稱之為多頻定位技術,比如華大北斗的HD8040芯片就支持L1、L2、L5等多頻定位:
雙頻首次使用在手機里便是小米8,使用GPS雙頻定位提升精度。
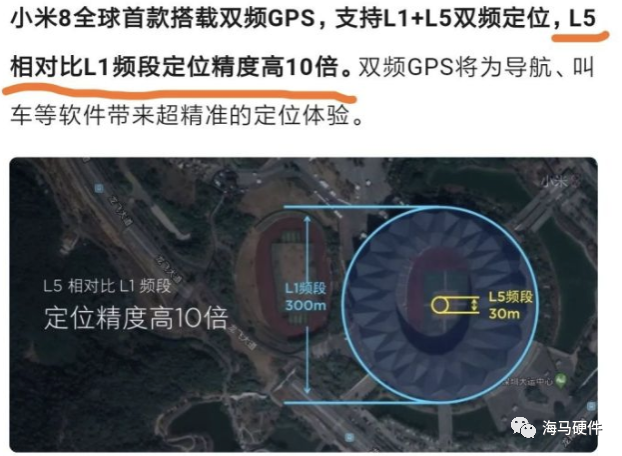
雙頻GNSS定位(如L1+L5)之所以能夠提升定位精度,是因為利用多個頻率的信號可以減少或校正定位過程中的誤差因素,從而得到更精確的位置信息。以下是雙頻GNSS定位提升精度的幾個原因:
1)高碼率數據:L5信號的高碼率意味著更密集的數據點,使得定位計算可以更頻繁地進行。這有助于提高定位精度,尤其在高動態和快速變化的場景中。
2)抑制多路徑效應:多路徑效應是指信號在傳播過程中受到反射或繞射,導致接收器接收到多個信號,從而產生干擾。不同頻率的信號在傳播過程中會有不同的多路徑特性,雙頻定位可以幫助識別和抑制多路徑效應,從而減小定位誤差。
3)減小鐘差影響:定位系統中的衛星鐘和接收器鐘的不精確性會導致定位誤差。不同頻率信號對鐘差的影響不同,通過使用多頻率信號,可以更準確地校正鐘差,從而提高定位的精度。
4)提供更多可見衛星:多頻率定位可以利用更多的衛星信號進行定位計算,特別是在信號遮擋較嚴重的環境中。更多的可見衛星意味著更好的幾何分布,有助于提高定位的可靠性和精度。
06 差分GNSS(DGNSS)
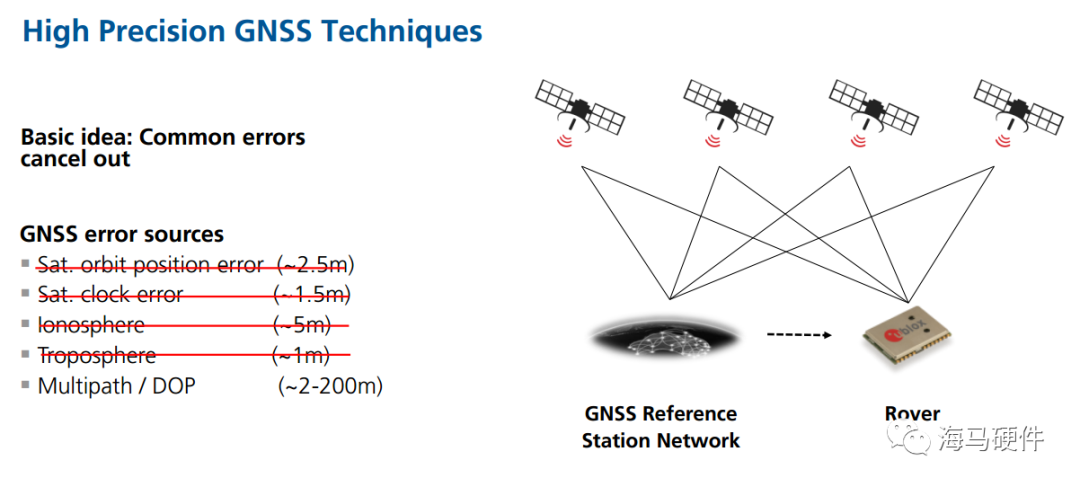
前面介紹了雙頻定位可以提升定位精度,若要進一步提升精度,就需要用到差分GNSS技術了,首先,我們來看下定位誤差來源。
1.衛星定位的誤差來源:
| 誤差來源 | 誤差項 | 誤差原因 | 定位誤差影響 |
| 衛星 | 衛星星歷誤差 | 星歷中,衛星空間位置與衛星實際位置間的偏差 | - |
| 衛星鐘差 | 指GPS衛星時鐘與GPS標準時間的差別 | 偏差和漂移和漂移總量仍在1ms~0.1ms以內,等效誤差將達到300km~30km | |
| SA干擾誤差 | SA誤差是美國軍方為了限制非特許用戶利用GPS進行高精度點定位而采用的降低系統精度的政策 | - | |
| 相對論效應的影響 | 由于衛星鐘和接收機所處的狀態(運動速度和重力位)不同引起的衛星鐘和接收機鐘之間的相對誤差 | 20~30km | |
| 傳播路徑 | 電離層折射 | 當GPS信號通過電離層時,與其他電磁波一樣,信號的路徑要發生彎曲,傳播速度也會發生變化,從而使測量的距離發生偏差 | - |
| 對流層折射 | GPS信號通過對流層時,也使傳播的路徑發生彎曲,從而使測量距離產生偏差 | - | |
| 多路徑效應 | 測站周圍的反射物所反射的衛星信號(反射波)進入接收機天線,將和直接來自衛星的信號(直接波)產生干涉,從而使觀測值偏離 | ||
| 接收機 | 接收機鐘差 | GPS 接收機一般采用高精度的晶振。接收機的鐘面時與GPS標準時之間的差異稱為接收機鐘差 | |
| 接收機的位置誤差 | 接收機天線相位中心相對測站標石中心位置的誤差 | ||
| 接收機天線相位中心偏差 | 觀測時,天線的相位中心隨著信號輸入的強度和方向不同而有所變化,這種差別叫天線相位中心的位置偏差 | ||
| 計算誤差 | 由于算法、硬件不穩定、輻射或熱電效應等造成的計算錯誤 |
2.差分GPS定位原理
定位過程中,存在著三部分誤差。
一部分是對每一個用戶接收機所公有的,例如,衛星鐘誤差、星歷誤差、電離層誤差、對流層誤差等;
第二部分為不能由用戶測量或由校正模型來計算的傳播延遲誤差;
第三部分為各用戶接收機所固有的誤差,例如內部噪聲、通道延遲、多徑效應等。
利用差分技術,第一部分誤差完全可以消除,第二部分誤差大部分可以消除,其主要取決于基準接收機和用戶接收機的距離,第三部分誤差則無法消除。
差分GNSS定位的基本原理如下:
1)基準站觀測:在差分GNSS定位中,除了普通的移動接收器外,還需要設置一個或多個稱為基準站的固定接收器。這些基準站位于已知位置,并且接收衛星信號的數據,包括偽距(pseudo-range)和載波相位(carrier phase)等信息。
2)移動接收器觀測:移動接收器位于需要定位的位置,同樣也接收衛星信號并記錄偽距和載波相位等觀測數據。
3)差分計算:接收器觀測數據中的誤差因素,如大氣延遲、鐘差、多路徑效應等,會影響定位精度。差分定位的關鍵在于將基準站的已知觀測數據與移動接收器的觀測數據進行比較。通過比較兩者的觀測數據,可以計算出差分修正值,即移動接收器與基準站之間的誤差。
4)誤差校正:計算得到的差分修正值包括了在信號傳播過程中產生的誤差,如大氣延遲、鐘差等。將這些差分修正值應用于移動接收器的觀測數據,可以校正移動接收器的定位數據,減小誤差的影響。
5)高精度定位:經過差分處理后,移動接收器的定位數據已經被校正,得到了更準確的結果。基于這些校正后的數據,可以實現高精度的定位結果,甚至達到厘米級的精度。
差分GNSS定位通過基準站的觀測數據和移動接收器的觀測數據之間的比較和校正,有效減小了誤差因素的影響,提供了更精確的定位結果。
根據差分GPS基準站發送的信息方式可將差分GPS定位分為三類,即:位置差分、偽距差分和載波相位差分。這三類差分方式的工作原理是相同的,即都是由基準站發送修正數據,由用戶站接收并對其測量結果進行修正,以獲得精確的定位結果。所不同的是,發送修正數據的具體內容不一樣,其差分定位精度也不同。
1)位置差分原理
這是一種最簡單的差分方法,任何一種GPS接收機均可改裝和組成這種差分系統。安裝在基準站上的GPS接收機觀測4顆衛星后便可進行三維定位,解算出基準站的坐標。由于存在著軌道誤差、時鐘誤差、SA影響、大氣影響、多徑效應以及其他誤差,解算出的坐標與基準站的已知坐標是不一樣的,存在誤差。基準站利用數據鏈將此改正數發送出去,由用戶站接收,并且對其解算的用戶站坐標進行改正。
最后得到的改正后的用戶坐標已消去了基準站和用戶站的共同誤差,例如衛星軌道誤差、 SA影響、大氣影響等,提高了定位精度。以上先決條件是基準站和用戶站觀測同一組衛星的情況。位置差分法適用于用戶與基準站間距離在100km以內的情況。
2)偽距差分原理(RTD)
偽距差分是目前用途最廣的一種技術。幾乎所有的商用差分GPS接收機均采用這種技術。國際海事 無線電委員會推薦的RTCM SC-104也采用了這種技術。
在基準站上的接收機要求得它至可見衛星的距離,并將此計算出的距離與含有誤差的測量值加以比較。利用一個α-β濾波器將此差值濾波并求出其偏差。然后將所有衛星的測距誤差傳輸給用戶,用戶利用此測距誤差來改正測量的偽距。最后,用戶利用改正后的偽距來解出本身的位置,就可消去公共誤差,提高定位精度。
3)載波相位差分原理(RTK)
載波相位差分技術又稱之為RTK技術(real time kinematic),是建立在及時處理兩個測站的載波相位基礎上的。載波相位差分技術能實時提供觀測點的三維坐標,并達到厘米級的高精度。
與偽距差分原理相同,由基準站通過數據鏈及時將其載波觀測值及基準站坐標信息一同傳送給用戶站。用戶站接收GPS衛星的載波相位與來自基準站的載波相位,并組成相位差分觀測值進行及時處理,能及時給出厘米級的定位結果。
實現載波相位差分GPS的方法分為兩類:修正法與差分法。前者和偽距差分相同,基準站把載波相位修正量發送給用戶站,以改正其載波相位,之后求解坐標。后者把基準站采集的載波相位發送給 用戶臺進行求差解算坐標。前者是準RTK技術,后者為真正的RTK技術。
07 地理坐標系
WGS-84坐標系:WGS-84(World Geodetic System 1984)是一種全球性的地球坐標系,被廣泛用于GPS和衛星導航系統中。WGS-84坐標系提供了地球上任意點的準確經緯度信息,常規定位模塊輸出數據的格式為NMEA-0183,使用的坐標系是WGS-84。
出于對地理信息的管理和安全考慮,我國測繪局要求所有從事地理測量、地圖繪制的公司、單位機構、個人必須使用GCJ-02坐標系。
GCJ-02坐標系:GCJ-02(國測局-02)坐標系,也被稱為“火星坐標系”,是中國國家測繪局采用的一種坐標系。它在WGS-84基礎上進行了偏移和加密,以實現安全和精度的目的。GCJ-02坐標系主要在中國國內的地圖和導航應用中使用,以符合中國國內的法規和要求。
因此,在國內定位模塊輸出的WGS-84坐標會與國內地圖軟件顯示的坐標存在偏差,為了解決這個問題,國內的地圖軟件和導航設備通常會進行WGS-84到GCJ-02的坐標轉換,以保證顯示的位置與實際地理位置一致。這種坐標系偏移轉換涉及到一些算法,例如中國國內常用的"火星坐標系轉換算法"(通常是通過加密與坐標調整來實現的),開發者和用戶需要在應用程序中嵌入這些算法,以確保在國內的地圖和導航應用中顯示正確的位置信息。
| 坐標系 | 地圖 |
| WGS-84 |
Google Map Bing Map Here Map etc. |
| GCJ-02 |
高德地圖 騰訊地圖 谷歌地圖(中國)等 |
| BD-09(百度坐標系,需要專門算法轉換) | 百度地圖 |
審核編輯:彭菁
-
衛星通信
+關注
關注
12文章
716瀏覽量
38740 -
衛星
+關注
關注
18文章
1712瀏覽量
67005 -
定位技術
+關注
關注
7文章
288瀏覽量
25350 -
無線電
+關注
關注
59文章
2139瀏覽量
116434 -
GNSS
+關注
關注
9文章
767瀏覽量
47898 -
導航衛星
+關注
關注
0文章
22瀏覽量
13193
原文標題:衛星定位技術學習筆記(GPS/北斗/SBAS/RTK/RTD/NMEA/CEP等等)
文章出處:【微信號:海馬硬件,微信公眾號:海馬硬件】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
采用GNSS天線模塊設計衛星定位系統
北斗衛星導航系統有什么特別
中國第二代導航衛星系統發展到了什么程度?
TAU1201多系統多頻導航定位模塊
全球導航衛星系統進展及對導航定位的改善
Maxim推出全球導航衛星系統高性能方案MAX2769B和MAX2670

安捷倫發表北斗GNSS衛星訊號模擬選項
博通推出新型GNSS定位芯片支持中國北斗衛星系統
GNSS衛星導航射頻前端芯片解析
北斗衛星系統組網對于GNSS定位產品穩定性會有很大提升
新思科技與Nestwave攜手打造低功耗全球導航衛星系統解決方案
UM2334_X_CUBE_GNSS1_STM32Cube全球導航衛星系統軟件擴展包入門指南

為什么自動駕駛中全球導航衛星系統如此重要?





 工商網監
工商網監
評論