 高光譜成像技術在垃圾分選中的應用
高光譜成像技術在垃圾分選中的應用
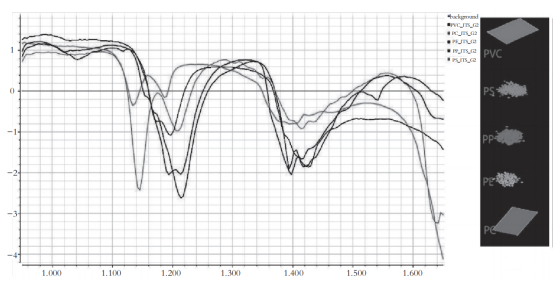
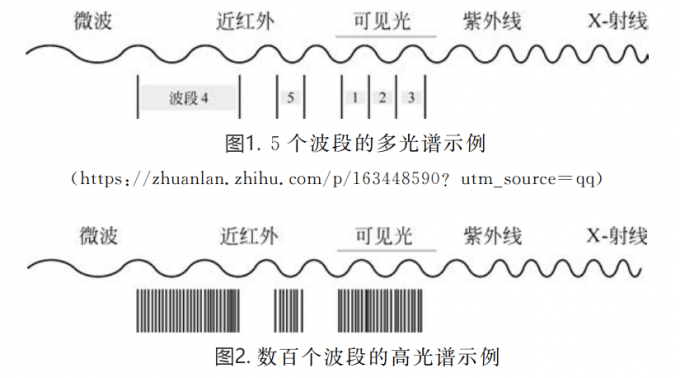
對于垃圾分類的需求來說,如果僅需進行大類的分選,2D相機加上視覺算法可以實現較好的分類效果。但是如果需要進一步進行精確的材質細分,例如區分塑料中的PE、PVC、PP、ABS等細分材質,則必須要用到高光譜相機。高光譜成像的實現基礎是成像光譜學,其集成了光學成像技術和光譜分光技術。高光譜數據結合圖像和光譜功能,可進行成分分析,提高分類精度,并通過坐標系關聯實現機器人實時抓取。
分析基于高光譜分選的關鍵技術
高光譜分選設備的關鍵技術主要包括分類算法和控制系統2個部分。分類算法分為基于光譜相似度匹配的分類算法和基于機器學習的分類算法。控制系統包括視覺系統、控制中心、輸送系統、執行系統等。
高光譜相機原理
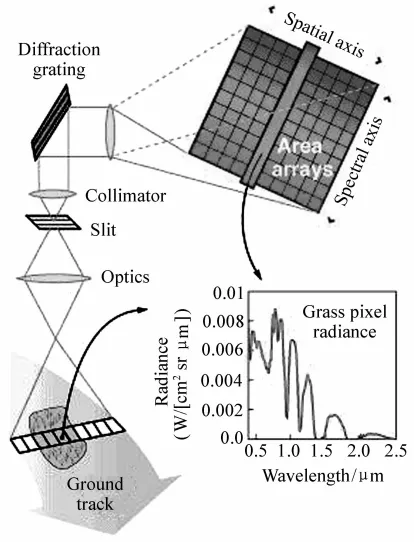
高光譜相機采集物體的反射光譜,典型的高光譜相機的原理是,光源投射到待測物體上,反射后經過相機鏡頭前端的狹縫進入高光譜相機內部的核心元件——分光儀。分光儀將每一束光分成多束單色光,投到面陣相機上。面陣相機狹縫的長度方向w為像素維度,與狹縫垂直方向h為光譜維度,面陣相機w和h2個方向的分辨率決定著高光譜數據的像素分辨率和光譜分辨率。

2、數據處理
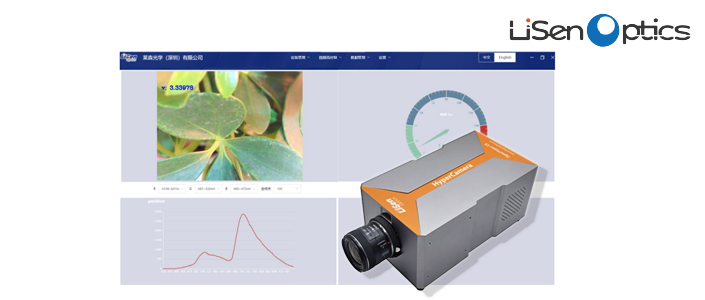
高光譜相機數據是三維數據,需要處理面陣相機二維數據獲取和數據拼接兩部分。獲取面陣相機數據與普通2D相機無差異,調整圖像質量時,需調整包括光源亮度、光圈、焦距和曝光時間等,以獲得最優的圖像效果。
基于機器學習的分類方法
基于機器學習的分類方法分為非監督分類和監督分類。非監督分類是指在沒有任何分類先驗知識的情況下,僅依據數據本身的統計特征及自然點群的分布情況來劃分類別的分類方法,代表性的非監督分類包括均值聚類算法(K-Means)、迭代自組織數據分析算法。監督分類是指以先前提取的訓練樣本作為先驗知識,以對訓練樣本的學習構建分類模型,并對其他數據進行分類的過程。監督分類算法常用的包括高斯最大似然分類法、最小距離分類、K近鄰、決策樹以及支持向量機等。由于高光譜數據的波段數通常有200多個以上,包含豐富的信息,但有很多數據冗余,在進行監督分類之前,需要對數據進行特征提取,選取包含信息量大的波段或者特征來降低數據的冗余程度。將原始高維數據投影到一個新的低維空間,從而獲得原始數據的更精簡的表示,即降維,可以有效減少運算量,提高運算速度。常用的降維方法包括主成分分析(PCA)、線性判別分析(LDA)、回歸系數法、連續投影法等。
推薦:
無人機機載高光譜成像系統iSpecHyper-VM100
一款基于小型多旋翼無人機機載高光譜成像系統,該系統由高光譜成像相機、穩定云臺、機載控制與數據采集模塊、機載供電模塊等部分組成。無人機機載高光譜成像系統通過獨特的內置式或外部掃描和穩定控制,有效地解決了在微型無人機搭載推掃式高光譜照相機時,由于振動引起的圖像質量較差的問題,并具備較高的光譜分辨率和良好的成像性能。

審核編輯 黃宇
-
成像技術
+關注
關注
4文章
290瀏覽量
31455 -
高光譜
+關注
關注
0文章
330瀏覽量
9934
發布評論請先 登錄
相關推薦

無人機機載高光譜成像系統的應用及優勢


高光譜成像技術在膚檢測、植被遙感與環境檢測中的應用

高光譜成像系統:光譜成像技術在海域目標探測中的應用

如何使用高光譜成像技術進行作物健康監測?


便攜式高光譜成像系統在遠程感知中的應用探究





 工商網監
工商網監
評論