

藍牙定位技術主要應用于室內定位,目前有藍牙感知和藍牙定位兩個應用方向,由于技術特點的限制,現階段的藍牙定位技術精度為10米,難以滿足定位產品市場的需求。2019年藍牙組織發布了藍牙5.1技術,該技術引入尋向功能,將定位精度提升到厘米級。藍牙5.1終端產品的射頻性能,直接影響到應用軟件的方向計算結果,導致定位精度無法達到最佳。潤博君按照藍牙當前的定位技術和最新的5.1尋向技術,針對藍牙5.1的終端,提出一套測試方案,適用于研發和生產中,能夠有效提高終端的定位性能。
一、概述
藍牙技術已經普遍應用于智能手機、健康手環和電腦等電子設備,得到廣泛的關注。據藍牙組織統計,目前有不少于80億藍牙設備,在未來,物聯網高速發展中,藍牙設備的數量會越來越龐大。由于衛星信號受到遮擋后衰減,室內定位一直是衛星定位的死角。近年來,基于現有的無線技術,人們進行了一些室內定位的研究和開發。其中,由于技術成本低,基于低功耗藍牙的定位方案受到人們的追捧,已經在市場上得到實際應用。但是,現有的藍牙定位方案,存在明顯的缺陷,比如,定位精度為1到10米,難以滿足高精度的定位需求。2019年,藍牙組織根據人們在室內定位方面的需求,在藍牙5.1中新增了藍牙尋向功能,結合現有的藍牙定位方案,定位的精確度可達到厘米級。
初始狀態為環回,非跳頻。EUT分別工作在低、中、高三個頻點,回送調制信號為PN9的DH1分組。測試儀通過LMP信令控制EUT輸出功率,并測試功率控制步長的范圍,規范要求在2dB和8dB之間。
二、藍牙定位的應用介紹
無線電波在傳輸過程中,隨著傳輸距離的增加,信號會逐漸衰減。根據此特性,當前的藍牙定位方案基于相同的實現方式:根據測試發信方的信號強度,藍牙受信設備估算與發信方的距離。根據定位的應用場景,主要分為兩個應用方向,藍牙感知技術和藍牙定位技術。
2.1、藍牙感知技術
藍牙感知技術的實現相對簡單:根據發信方的信號強度變化來判斷發信方的位置。如圖1所示,受信方接收到發信方的信號,對信號進行分析后,估算距離遠近,在移動中,隨著距離發生變化,信號強度發生變化,信號增強,則更接近發信方,反之,則遠離發信方。
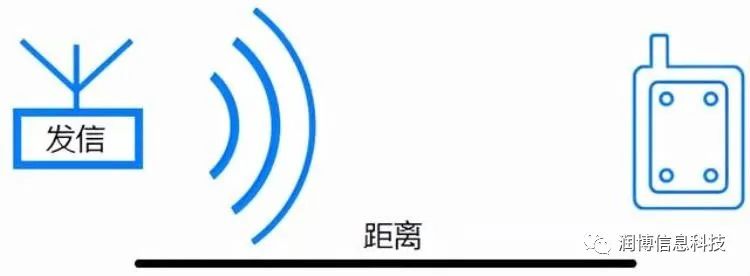
圖1:藍牙接近
基于藍牙感知技術,目前的應用是物品查找和興趣熱點兩種服務。物品查找主要是針對個人的一些應用,比如尋找個人用品,錢包或者鑰匙。在錢包里放置藍牙設備,用戶根據手機中的一個應用軟件,搜索該藍牙設備,就能監控或尋找錢包。
興趣熱點是指在一些大型公共場所里,在特定的興趣地點安裝藍牙設備,供訪問者搜索。比如,在博物館里,給展品綁定藍牙設備,參觀者用手機上的應用軟件,根據展品上藍牙設備發送的信號,更容易的找到自己感興趣的展位。根據商場里的商店發送的信號,顧客更容易找到自己感興趣的品牌。這些應用場景,都可以通過興趣熱點,使用戶得到更好的服務體驗。
藍牙感知技術,從自身移動時信號強度的變化判斷與發信方的距離遠近變化,在實際應用中,需要“移動”較長的時間,才能找到大約的方向,用戶體驗較差,所以,只能應用于一些簡單的場景。
2.2、藍牙定位技術
藍牙感知技術是端對端的簡單應用,而藍牙定位技術則是相同原理下的一種復雜應用,主要分為實時追蹤和室內定位兩個應用方向。
2.2.1、實時追蹤
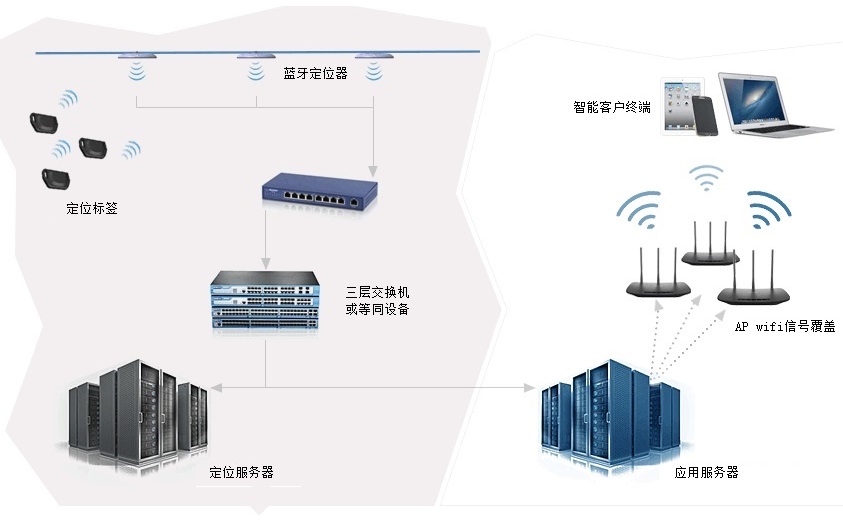
實時追蹤,主要應用于資產追蹤或者人物追蹤。例如,物流倉庫中的貨物、叉車和工人,醫院的醫護設備和病人,可以通過實時定位,進行更安全更優化的管理。如圖2,在室內特定位置的安裝藍牙接收機,實時接收從被追蹤者發出的信號,藍牙接收機將各自接收到的信號強度上報給服務中心,通過計算得到被追蹤者的位置。根據平面三點定位的要求,平面上需要安裝至少三個接收機,所有接收機需要構成網絡,由服務中心統一管理。
根據對實時性的要求,可以設置被追蹤者信號的發射周期,發射周期越大,電池的能耗越小,被追蹤者待機時間也越長,該周期的長短直接決定了追蹤位置的刷新率。

圖2:實時定位拓撲圖
2.2.2、室內定位
室內定位,主要是通過提供輔助信號,幫助終端計算自己的位置信息,主要應用于一些大型室內公共場所,例如,大型商場、超市或者辦公樓。在商場里安裝固定位置的藍牙發射裝置,周期性的發送藍牙信號,如圖3,訪客通過手機應用軟件,接收來自固定發射器的信號,通過信號強度計算自己與固定發射器的距離。在平面上,通過至少三個固定發射器的信號強度,就能得出平面上的位置信息。

圖3 室內定位拓撲圖
藍牙定位技術,首先,需要在室內布置一定數量的固定藍牙設備,而且,這些藍牙設備的位置坐標時已知的。其次,通過測量信號強度估算距離,由于估算的精度有限,目前的定位精度為1到10米,該定位精度遠達不到市場的需求。針對該問題,藍牙組織在藍牙5.1中引入了尋向技術,將定位精度提高到厘米級。
三、藍牙5.1:尋向功能
在藍牙5.1新增的幾個功能中,藍牙尋向功能是最重要的特性。根據應用場景的不同,分成兩種尋向方式,到達角度(AoA)和離開角度(AoD)。
3.1、到達角度(AoA)
圖4為AoA的示意圖,發信方為單天線,受信方為多天線。發信方的連續波信號到達受信方后,由于受信方每個天線與發信方的距離差異,到達的時間形成差異,造成了電磁波的相位差異。每個天線上可以得到不同的相位信息,利用天線間的相位差,AoA測試法就可以計算得到與被定位對象的角度。從應用場景上,AoA類似于當前的藍牙實時追蹤技術。

圖4 AoA定位模型
如圖5,d為接收天線陣列中兩個天線的距離,為兩個天線的相位差,為波長。

圖5 到達角度計算
根據公式1,就能計算得到到達角度。

3.2、離開角度(AoD)
圖6為AoD的示意圖,發信方的多個天線組成天線陣列,分時發送同一個連續波信號。由于每個發射天線與接收天線的距離不同,信號到達受信方后,形成了相位差異。利用相位差,AoD測試法就可以計算得到自己與對方的角度。AoD可以替代現在的室內定位模型,用于室內定位。

圖6 AoD定位模型
如圖7,d為發射天線陣列中兩個天線的距離,為兩個天線的相位差,為波長,根據公式1,計算得到離開角度。

圖7 離開角度計算
3.3、藍牙尋向的技術優勢
相對于現有的藍牙定位技術方案,尋向技術的引入,對定位精度的改進有了新的突破口。
首先,藍牙感知是根據接收信號強度的變化,分析距離遠近變化,受無線環境影響,存在較大的不確定性。尋向技術則通過發信方信號,無需信號強弱分析,直接計算發信方的方向。所以,藍牙尋向在物品查找和興趣熱點兩種服務的應用中,優勢更加明顯。
其次,現有的實時追蹤和室內定位的應用中,根據信號強度測距,會帶來很大的誤差。如果引入尋向技術,結合方向信息和信號測距結果,能得到更準確的位置信息。
因此,藍牙尋向的引入,讓藍牙定位有了更大的發展空間。
3.4、藍牙尋向的實現難點
如圖8,藍牙5.1在信號的尾部引入了CTE部分,CTE由內容為全1的符號組成,CTE所含符號的數量由上層協議決定。接收機是通過對CTE數據的采樣分析,得到波長,相位。在計算公式1中,參數波長、相位差和天線距離直接影響了尋向的誤差。

圖8 藍牙5.1的信號格式
首先,波長由發射信號頻率決定。因為(Constant Tone Extension)CTE由全1的符號組成,CTE部分的頻率為調頻后的頻率,真實的波長由載波頻率和調制頻率的準確性來決定。
其次,是接收方通過信號采集,分析得到的結果。如圖9所示,多天線發射或者接收時,需要在各個天線上依次發送信號,每次切換天線時,需要預留一個切換時隙,作為保護間隔。所以,天線切換和相位的連續性也會對尋向計算產生影響。

圖9 CTE信號收發時隙
最后,由于電路板的布置和天線形態的不同,天線距離d存在不確定性,本文在載波頻率為2402MHz,天線距離d為80mm,測試角度不變的情況下,在天線距離d的誤差從0遞增到40mm時,分析對角度計算結果的影響。如圖10,圖中曲線分別為理想角度和實際計算角度,理想角度保持恒定,當天線距離的誤差增大時,實際計算的角度有遞增趨勢。

圖10 天線距離誤差對尋向結果的影響
減少上述因素帶來的影響,就能進行更精確的尋向。而使用測試儀表對產品的性能測試,構建相應的測試模型,能從測試數據上分析產品的尋向精度,同時,也能對產品的尋向結果進行校準。
四、藍牙5.1的測試
根據藍牙尋向產品的分類,藍牙組織在測試規范中分別對到達角度(AoA)和離開角度(AoD)的產品,制定了發射機和接收機的測試項目。
發射機的測試項目,包含發射功率,發射機的載波頻率誤差以及頻譜漂移,另外,AoD產品具有多天線,工作時多天線分時發射信號,所以,需要測試AoD產品天線切換時的射頻性能,保持功率和相位的穩定性。
接收機的測試項目,針對被測件尋向的要求,需要對接收到的信號功率和相位進行計算。AoA產品具有多天線,工作時多天線分時接收,每個天線準確的計算相位信息,是尋向精度的保證。
AoD接收機和AoA發射機,都是單天線產品結構,采取了相同的測試環境。以羅德與施瓦茨公司的綜測儀CMW270為例,如圖11,用射頻線纜連接儀表與被測件,在測試AoD接收機時,儀表發送信號,AoD產品接收信號。在測試AoA發射機時,AoA產品發射信號,儀表分析信號的射頻指標。

圖11 AoD接收機和AoA發射機的測試
AoD發射機和AoA接收機,二者都是多天線的產品結構,所以,需要搭建特別的測試環境,如圖12,在測試儀表CMW270和被測件之間,需要一個額外的合路器或功分器,CMW500模擬單天線終端。

圖12 AoD發射機和AoA接收機的測試
因為測試儀器發送信號的相位和功率是可編輯的,所以,在產品整機的研發和生產階段,利用測試儀表發出的信號,測試整機定位的準確性。如圖13,測試儀在發射信號的相應時隙,改變每個接收天線的對應相位P0、P1、P2和P3,模擬相應的角度。圖中四個天線接收的信號,對應時隙的實測相位為△P0、△P1、△P2和△P3,根據實測相位,被測設備計算得到定位角度。模擬的偏差,即為尋向偏差。


圖13 測試儀表模擬相位變化
如果動態的改變信號的相位和功率,測試儀表可以模擬移動中的定位場景。功率的變化,對應于發信方與受信方之間距離遠近的變化;相位的變化,對應于雙方方向的變化。根據應用場景,按照一定的“速度”來改變發射信號的功率和相位,可以模擬相應的移動速度和軌跡。結合應用程序和地圖信息,可以測試終端在移動場景下的定位能力。
綜上所述,采用測試儀表,可以對藍牙尋向產品的射頻指標進行定量分析,也可以模擬現實的定位場景,進行定位服務的應用測試,在測試中發現和糾正尋向偏差。
五、總結
多年來,低功耗藍牙為消費、零售、醫療保健以及制造領域的各類應用創造了功能強大、低成本的解決方案,尋向技術將使藍牙技術更好地滿足定位服務行業中不斷變化的需求。借助測試儀表,在研發和生產階段對終端產品的測試,能幫助提升定位服務的精度,是產品質量的重要保障。
-
接收機
+關注
關注
8文章
1200瀏覽量
54017 -
藍牙技術
+關注
關注
45文章
347瀏覽量
53295 -
無線電波
+關注
關注
2文章
260瀏覽量
25902 -
電磁波
+關注
關注
21文章
1478瀏覽量
54269 -
功分器
+關注
關注
4文章
135瀏覽量
27428
發布評論請先 登錄
相關推薦
UWB、RFID、藍牙、WiFi定位技術比較
藍牙技術原理與測試(中文)
藍牙定位技術的應用
UWB定位技術與藍牙定位技術比較
常用的室內定位方案技術中,藍牙定位為什么能脫穎而出?
藍牙技術原理與測試
仁微電子推出藍牙高低精度定位系統測試套件工具包

UWB定位技術與藍牙定位技術的對比

定位方案 I 為何自連采用藍牙定位技術?

為何自連采用藍牙定位技術?






 工商網監
工商網監

評論