 自動駕駛系統任務控制介紹
自動駕駛系統任務控制介紹
任務控制
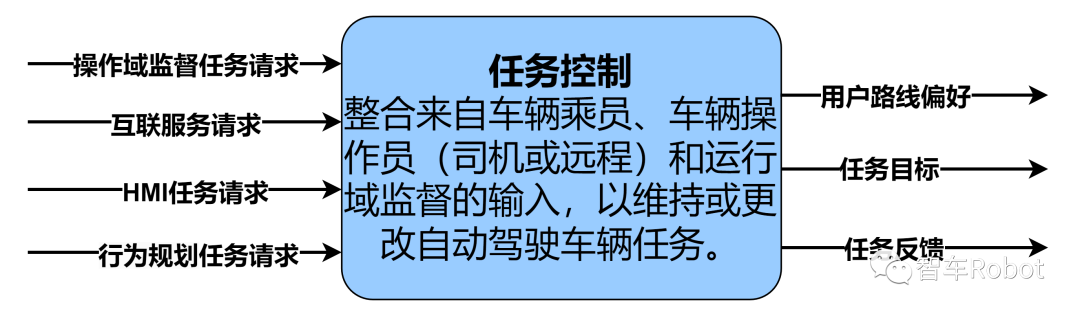
任務控制任務控制組合了來自車輛乘員、車輛操作者(司機或遠程操作者)和操作域監督的輸入,以維持或改變自動駕駛車輛任務問題目標和邊界到路徑規劃。在此任務中,它使用兩個關鍵抽象:
在這個任務中,它使用了兩個關鍵的抽象概念:
?自動駕駛車輛任務:代表使用目的和駕駛狀態的結合。包括目標目的地、行程中斷、迭代和等待模式,以及任務期間駕駛狀態之間的轉換。
?駕駛狀態:代表自動駕駛車輛、司機和潛在監督車隊操作者的注意力和操作權限狀態。駕駛狀態包括最小風險條件轉換、手動駕駛以及各種輔助和自動化駕駛級別。
注:在輔助駕駛(SAE L0-L2 級別,包括 L2+
擴展)的背景下,對通用功能塊圖提出以下解釋:用戶主動的操作,比如踩踏油門、轉動方向盤以直接控制或略微引導車輛運行軌跡,從這個簡化的架構的角度來看,是對任務目標和用戶路線偏好的短期設置變更。這些變更通過HMI任務請求從人機界面接收。
因此,這些抽象概念具有擴展的傳統意義。這些解釋包括“立即右轉”或“加速”(均為用戶路線偏好))以及更復雜的輔助行為,比如“如果交通情況允許,進行監控的自動超車”或“根據左轉指示燈是否打開改變自適應巡航控制(ACC)”。作為下游結果,“路線目標”(傳遞給行為規劃)可能反映用戶主動操控。
任務控制輸入:
?操作域監督任務請求:操作域監督系統的條件分析觸發的改變自動駕駛車輛任務,可能啟動駕駛狀態短期變化,在任務控制責任下進行狀態轉換。任務改變也可能導致任務目標信號變化。
?連接服務任務請求:連接服務觸發改變自動駕駛車輛任務,將導致任務目標信號變化,作為被修改的任務的二階效應,驅動狀態可能會發生變化。
?人機界面任務請求:任何類型用戶交互觸發改變自動駕駛車輛任務,可能立即改變駕駛狀態,進而改變任務目標信號。
?行為規劃任務請求:行為規劃觸發改變自動駕駛車輛任務,如識別/響應交通情況變化以重新計算用戶路線偏好。任務控制輸出:
?用戶路線偏好:通過提取自動駕駛車輛任務中數據生成,以在完成任務的同時最小化離開當前操作域的風險。
任務目標:從自動駕駛車輛任務生成,作為使用目的表達。
?任務反饋:綜合自動駕駛車輛任務和四個請求信號,判斷是否需要駕駛員警報、特定行動請求或提供進度報告。
-
汽車電子
+關注
關注
3027文章
7972瀏覽量
167149 -
控制
+關注
關注
4文章
1011瀏覽量
122677 -
車輛
+關注
關注
0文章
83瀏覽量
15163 -
自動駕駛
+關注
關注
784文章
13838瀏覽量
166529
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論