 自動駕駛軌跡規劃功能模塊圖
自動駕駛軌跡規劃功能模塊圖
軌跡規劃(路徑規劃)
軌跡規劃功能模塊圖
軌跡規劃功能模塊提供算法以規劃機動的路徑,以便控制轉向、制動和加速。它與行為規劃密切合作,有時兩者作為相同算法的輸出獲得,或以反饋遞歸調整的方式獲得。自動駕駛車輛依賴實時的車輛狀態和環境信息(例如周圍車輛、道路條件)來獲得確保安全通行的本地軌跡,同時最小化偏離整體行程軌跡(來自路徑規劃的全局軌跡)。本地軌跡規劃可以定義為實時規劃車輛從一個可行狀態到下一個可行狀態的過渡。這一切都在滿足基于車輛動力學的車輛運動學限制、乘客舒適度、車道邊界和交通規則的約束下進行,同時避免障礙物。傳感器范圍、預測交通參與者運動的時間以及傳感器不完善等限制將限制車輛的最大速度來計算機動。因此,對交通參與者運動進行風險評估預測是機動規劃的一個重要部分,這通過基于模型的交通運動抽象級別來實現。用于避障的軌跡規劃方法采用下表中顯示的一種技術。

控制策略優缺點需要注意的是,上述所有方法都假設軌跡規劃系統可以按需獲得環境和前導車輛狀態的精確知識。不穩健的軌跡規劃方法可能會導致不可實現和/或不安全的參考軌跡,這在高速行駛期間尤其存在重大安全風險。上述討論的各種軌跡規劃技術提出了不同的方法來處理當前環境感知中的不確定性和有限的未來預測能力。
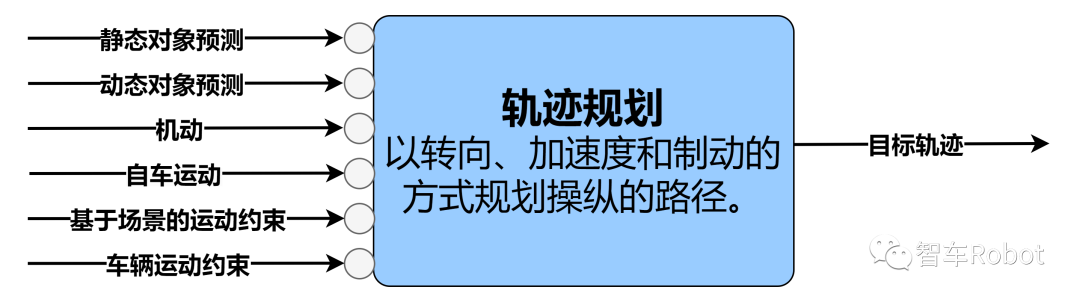
軌跡規劃輸入:
?靜態對象預測:用于評估軌跡計算中的安全性和舒適性風險
?動態對象預測:用于評估軌跡計算中的安全性和舒適性風險
?機動:提供要進一步處理為軌跡的機動目標
?自車運動:用于軌跡計算
?基于場景的運動約束:提供駕駛場景條件的車輛運動限制,例如濕滑/劣化的路面,以在軌跡計算中考慮。
?車輛運動約束:提供來自運動控制的動態運動限制反饋,以應用于軌跡計算軌跡規劃輸出:?目標軌跡:沿軌跡路徑表達轉向、制動和加速變化的目標軌跡(曲線路徑)
-
汽車電子
+關注
關注
3026文章
7941瀏覽量
166910 -
車輛
+關注
關注
0文章
82瀏覽量
15128 -
自動駕駛
+關注
關注
784文章
13784瀏覽量
166388 -
環境感知
+關注
關注
0文章
24瀏覽量
7989
發布評論請先 登錄
相關推薦
FPGA在自動駕駛領域有哪些優勢?
【mBot申請】自動駕駛車
自動駕駛真的會來嗎?
細說關于自動駕駛那些事兒
自動駕駛的到來
AI/自動駕駛領域的巔峰會議—國際AI自動駕駛高峰論壇
硅谷組建團隊、L3產品落地,想法多多的騰訊自動駕駛
UWB主動定位系統在自動駕駛中的應用實踐
如何讓自動駕駛更加安全?
自動駕駛技術的實現
自動駕駛線控底盤VCU功能介紹
自動駕駛中基于圖搜索的常用路徑規劃算法介紹

自動駕駛之路徑規劃






 工商網監
工商網監
評論