

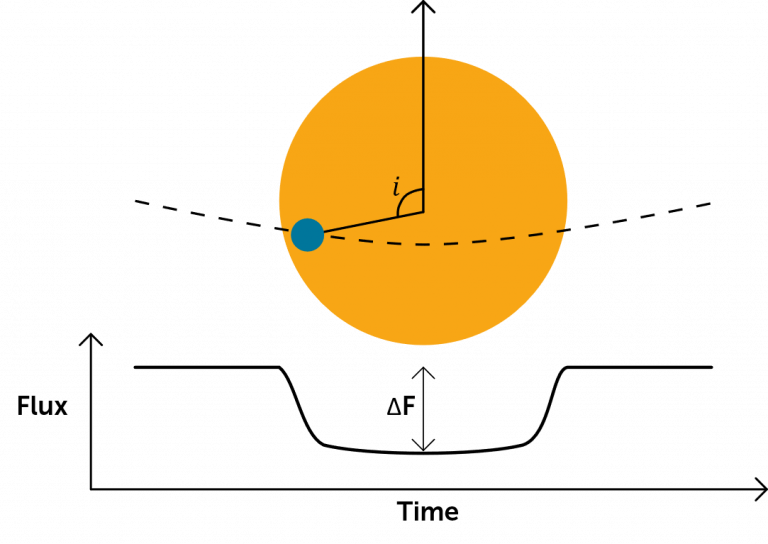
圖1:顯示一顆軌道運(yùn)行的行星以典型的光曲線從恒星前面經(jīng)過的示意圖,軌道傾角由i表示。光曲線測(cè)量通量隨時(shí)間的變化,通量遞減(ΔF)表示行星的存在。
介紹
外行星是圍繞太陽(yáng)以外的恒星運(yùn)行的行星,多年來,它們的探測(cè)和表征一直處于天文學(xué)的前沿。到目前為止,已經(jīng)通過一系列不同的方法確認(rèn)了4000多顆系外行星,還有5000多顆候選系外行星。在接下來的十年里,表征宜居系外行星將是天文學(xué)的關(guān)鍵研究領(lǐng)域之一,目標(biāo)是尋找類地行星。盡管有多種探測(cè)方法,但凌日光度法和徑向速度是系外行星探測(cè)/表征最常見的技術(shù),每種方法分別發(fā)現(xiàn)71.3%和22.9%的系外行星。
凌日光度計(jì)
凌日光度法是一種間接方法,用于測(cè)量由軌道行星從恒星前方經(jīng)過引起的恒星通量減少[2]。對(duì)恒星通量的測(cè)量會(huì)產(chǎn)生一條光曲線,當(dāng)一顆行星從恒星前面經(jīng)過時(shí),它的一些光會(huì)被阻擋,這表明光曲線略有下降。圖1顯示了一顆系外行星凌日的示意圖和產(chǎn)生的典型光線曲線(圖僅為說明,曲線被夸大了)。
通過假設(shè)行星的通量可以忽略不計(jì),并且恒星和行星都是球形的,光線曲線可以用來確定行星的相對(duì)大小、軌道傾角和軌道周期。只要有基于徑向速度測(cè)量的軌道解決方案,凌日光度法也可以與軌道元件相結(jié)合(見下文)。在這種情況下,軌道的傾角可以用來確定行星的質(zhì)量。結(jié)合質(zhì)量和行星半徑,我們得到了平均密度和表面重力。這些參數(shù)代表了行星表征的第一步,有助于區(qū)分氣態(tài)巨星、冰行星和巖石行星[2]。
大氣特征也可以通過凌日光度法來實(shí)現(xiàn)。通過使用不同的濾光器測(cè)量行星的凌日,光線曲線的變化可以表明某些分子的存在。例如,水分子吸收近紅外光,因此如果它們存在于行星的大氣層中,大氣層對(duì)近紅外波長(zhǎng)將是不透明的。當(dāng)使用近紅外濾光器時(shí),由于大氣層的透明度較低,行星將阻擋更多的光線。這意味著,與光學(xué)波長(zhǎng)相比,日食將更早開始,晚結(jié)束,產(chǎn)生一條最小值更深、更寬的光曲線。
然而,這種方法受到幾何結(jié)構(gòu)的限制,因?yàn)橹挥邢鄬?duì)于地球從恒星前方經(jīng)過的行星才能用這種方式進(jìn)行研究。凌日光度法也存在誤報(bào),盡管測(cè)量了凌日行星的光曲線特征,但通量可能來自多恒星系統(tǒng)。假陽(yáng)性的一個(gè)例子是與一顆明亮的雙星在同一視線上的食雙星。單個(gè)恒星的通量減少了由食雙星引起的光曲線下降的視深度。由此產(chǎn)生的光線曲線在形狀上類似于凌日行星[2]。為了確認(rèn)凌日行星候選者不是假陽(yáng)性,需要對(duì)系統(tǒng)進(jìn)行徑向速度測(cè)量。
徑向速度
徑向速度是另一種間接的技術(shù),它測(cè)量恒星的光譜,以尋找可變的多普勒頻移,表明行星在軌道上運(yùn)行。恒星與行星的相互作用受引力控制,因此當(dāng)恒星拉動(dòng)行星時(shí),行星也會(huì)拉動(dòng)恒星,導(dǎo)致恒星以周期性運(yùn)動(dòng)運(yùn)動(dòng),通常被稱為“擺動(dòng)”。通過測(cè)量恒星的光譜,任何朝向和遠(yuǎn)離地球的運(yùn)動(dòng)都將分別被觀察為光譜的藍(lán)移或紅移,表明有一顆軌道行星。
通過這種方式,多普勒效應(yīng)可以用來確定行星的軌道周期、軌道大小和軌道速度。后者可以提供軌道行星的最小質(zhì)量。行星質(zhì)量越大,速度振幅就越大。然而,為了確定行星的真實(shí)質(zhì)量,需要凌日光度法,因?yàn)閺较蛩俣缺旧頍o法解釋軌道的傾斜[3]。圖2顯示了恒星-行星相互作用的示意圖,以及這如何影響恒星的光譜。
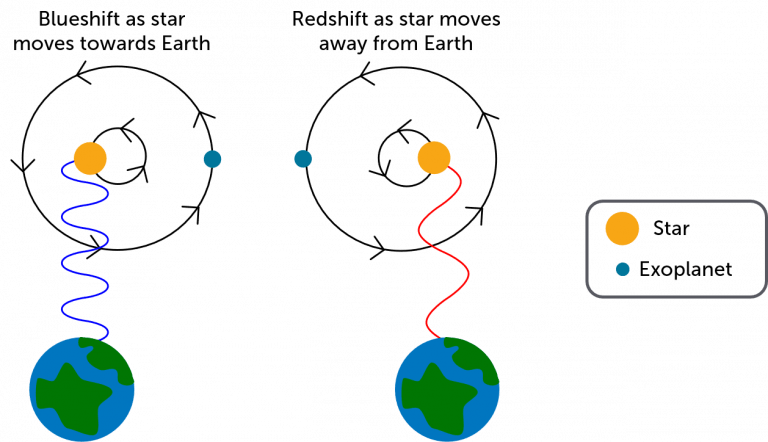
圖2:系外行星的引力如何導(dǎo)致恒星圓周運(yùn)動(dòng)的示意圖,當(dāng)恒星分別向地球移動(dòng)和遠(yuǎn)離地球時(shí),會(huì)導(dǎo)致藍(lán)移和紅移。圖像未按比例縮放。
由于徑向速度測(cè)量軌道天體的相對(duì)質(zhì)量,因此可以用來排除凌日光度法檢測(cè)到的系外行星的任何誤報(bào)。在食雙星的情況下,預(yù)期的多普勒頻移幅度很大,因?yàn)槲矬w的質(zhì)量相當(dāng)。因此,每秒幾百米或更高的球場(chǎng)中的徑向速度變化將有力地區(qū)分雙星和凌日行星,從而證實(shí)任何假陽(yáng)性。
凌日光度法和徑向速度都測(cè)量恒星通量隨時(shí)間或波長(zhǎng)的最微小變化。因此,這些技術(shù)在很大程度上依賴于先進(jìn)的探測(cè)器技術(shù)來成功探測(cè)和表征系外行星。
攝像頭要求
通過凌日光度法對(duì)系外行星的探測(cè)和表征依賴于對(duì)恒星通量微小變化的探測(cè)。這些通量的變化或下降通常小于恒星真實(shí)通量的1%。因此,高精度的相機(jī)對(duì)于測(cè)量通量的任何輕微下降都是至關(guān)重要的。此外,具有大動(dòng)態(tài)范圍和低噪聲的相機(jī)進(jìn)一步提高了識(shí)別系外行星的可能性,因?yàn)槿魏蝺A斜或光譜特征都可以與噪聲水平區(qū)分開來。
凌日光度測(cè)量通常需要在行星穿過恒星前方時(shí)進(jìn)行密集的觀測(cè)。這些高幀率觀測(cè)對(duì)于捕捉每次凌日的最大數(shù)據(jù)量和抵消恒星的不均勻性至關(guān)重要,特別是恒星邊緣或行星在凌日過程中可能覆蓋的活動(dòng)區(qū)域(恒星斑點(diǎn))。它還允許確定行星大小和傾角等參數(shù)。因此,具有高占空比(即,相對(duì)于曝光的最小讀出)的相機(jī)對(duì)于實(shí)現(xiàn)這種高節(jié)奏成像至關(guān)重要。高精度、低噪聲、大動(dòng)態(tài)范圍和高占空比的組合允許在保持高信噪比的同時(shí)進(jìn)行密集的觀測(cè)。
徑向速度,雖然是一種光譜技術(shù),但仍然需要先進(jìn)的相機(jī)參數(shù),如上述參數(shù)。邊緣化(相機(jī)傳感器內(nèi)光子的干擾)對(duì)徑向速度來說可能是非常有問題的,因?yàn)樗鼤?huì)在任何測(cè)量光譜的頂部造成正弦調(diào)制。徑向速度依賴于光譜的互相關(guān),因此任何邊緣偽影都會(huì)影響互相關(guān)的準(zhǔn)確性,從而降低系外行星特征的準(zhǔn)確性。
此外,在相機(jī)傳感器上具有良好的電荷傳輸效率是重要的。如果留下了一些電荷,或者像素之間存在一些相關(guān)的噪聲,這將影響相互關(guān)聯(lián),對(duì)系外行星的探測(cè)或表征產(chǎn)生負(fù)面影響。然而,這只是在使用CCD或EMCCD傳感器時(shí)需要考慮的問題。
用于凌日探測(cè)和徑向速度測(cè)量的COSMOS
COSMOS是Teledyne Princeton Instruments的大幅面背光高級(jí)CMOS相機(jī),具有凌日測(cè)光和徑向速度測(cè)量所需的許多相機(jī)質(zhì)量。由于其背光傳感器,COSMOS在可見光范圍內(nèi)具有>90%的峰值量子效率,如圖3所示。因此,即使使用高階成像,COSMOS也能夠?qū)⒏甙俜直鹊墓庾愚D(zhuǎn)換為光電子。COSMOS還可以實(shí)現(xiàn)低至0.7的電子讀取噪聲,使COSMOS適合于檢測(cè)光線曲線中最輕微的下降。結(jié)合高量子效率,這種低讀取噪聲為最終的大格式CMOS靈敏度提供了高信噪比。
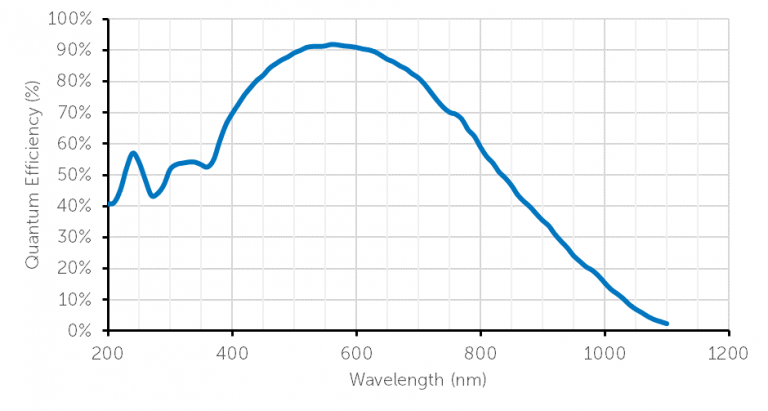
圖3:COSMOS相機(jī)的量子效率曲線,顯示了在可見光范圍內(nèi)的高量子效率和>90%的峰值量子效率。
大的動(dòng)態(tài)范圍在凌日光度法和徑向速度中很重要,因?yàn)樗试S確定輕微的波動(dòng)。它還允許測(cè)量較暗的信號(hào),而不會(huì)使來自周圍較亮物體的探測(cè)器飽和。動(dòng)態(tài)范圍是一個(gè)取決于相機(jī)線性、模數(shù)轉(zhuǎn)換器位深度和增益的參數(shù)。為了擴(kuò)展動(dòng)態(tài)范圍,CMOS相機(jī)通常以高增益和低增益對(duì)信號(hào)進(jìn)行多次采樣。然而,這些高增益和低增益讀數(shù)之間的交叉點(diǎn)可能會(huì)產(chǎn)生偽影,從而限制測(cè)量精度[4]。
先進(jìn)的CMOS設(shè)計(jì),如COSMOS中的設(shè)計(jì),確保了兩個(gè)ADC之間的精確交叉,以實(shí)現(xiàn)低噪聲和高線性的操作。通過與更高比特深度的ADC相結(jié)合,該技術(shù)提供了無與倫比的動(dòng)態(tài)范圍。更多關(guān)于LACera大動(dòng)態(tài)范圍的詳細(xì)信息? COSMOS中使用的技術(shù)可以在我們的文章《高動(dòng)態(tài)范圍CMOS的新時(shí)代》中找到。
傳統(tǒng)的全畫幅CCD傳感器依靠機(jī)械快門來阻擋讀出過程中的任何入射光。打開和關(guān)閉機(jī)械快門是一個(gè)相對(duì)緩慢的過程,為高節(jié)奏成像引入了定量誤差。機(jī)械快門的使用壽命也有限,在相機(jī)大量使用時(shí)經(jīng)常需要更換。由于COSMOS是一種CMOS探測(cè)器,它利用了一個(gè)快速的電子快門,在讀出之前,通過將檢測(cè)到的光電子轉(zhuǎn)移到幀存儲(chǔ)區(qū)域來停止曝光。電子快門不僅比機(jī)械快門更精確,而且可以減少檢測(cè)器的死區(qū)時(shí)間,在此期間相機(jī)不會(huì)暴露在光線下。這意味著,當(dāng)信號(hào)從存儲(chǔ)區(qū)域讀出時(shí),可以開始后續(xù)曝光,從而提供100%的占空比。這使得能夠?qū)y(cè)量系外行星的特征參數(shù)進(jìn)行密集、高節(jié)奏的成像。
結(jié)論
外行星探測(cè)和表征將在未來十年成為天文學(xué)的前沿。凌日光度法和徑向速度這兩種互補(bǔ)技術(shù)已被用于發(fā)現(xiàn)累計(jì)94.2%的系外行星。凌日光度法是一種間接的方法,用于尋找由于行星在恒星前方穿行而導(dǎo)致的恒星亮度下降,而徑向速度則用于尋找由于軌道行星的引力而導(dǎo)致的行星多普勒頻移。
這兩種技術(shù)都需要高精度,以及低噪聲、大動(dòng)態(tài)范圍和高靈敏度的相機(jī)。凌日測(cè)光還需要一臺(tái)高占空比的相機(jī),因?yàn)樵跐撛谛行谴┻^恒星表面時(shí),通常會(huì)使用以高節(jié)奏拍攝的密集幀來對(duì)其進(jìn)行成像。徑向速度,一種光譜技術(shù),可能會(huì)受到邊緣的極大阻礙,因此需要一臺(tái)邊緣盡可能小的相機(jī)。
COSMOS具有>90%的峰值量子效率、0.7 e-的低讀取噪聲和大動(dòng)態(tài)范圍,滿足凌日光度和徑向速度的最低相機(jī)要求。此外,CMOS傳感器架構(gòu)和電子快門使100%的占空比成為可能,從而實(shí)現(xiàn)了系外行星探測(cè)和表征的高節(jié)奏成像。這使得COSMOS對(duì)于凌日光度法和徑向速度法來說是不錯(cuò)的。
審核編輯 黃宇
-
傳感器
+關(guān)注
關(guān)注
2562文章
52485瀏覽量
763256 -
CMOS
+關(guān)注
關(guān)注
58文章
5977瀏覽量
237999 -
光譜
+關(guān)注
關(guān)注
4文章
900瀏覽量
35888
發(fā)布評(píng)論請(qǐng)先 登錄
VirtualLab 應(yīng)用:反射式金字塔波前傳感器的仿真
NVIDIA Cosmos加速機(jī)器人和自動(dòng)駕駛汽車物理AI發(fā)展

英偉達(dá)Cosmos-Reason1 模型深度解讀
行星減速步進(jìn)電機(jī)有什么作用?怎么運(yùn)作的?

FRED案例:天文光干涉儀
VirtualLab Fusion案例:反射式金字塔波前傳感器的仿真
英偉達(dá)推出基石世界模型Cosmos,解決智駕與機(jī)器人具身智能訓(xùn)練數(shù)據(jù)問題






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論