") 二維補(bǔ)償技術(shù),精準(zhǔn)定位的關(guān)鍵
二維補(bǔ)償技術(shù),精準(zhǔn)定位的關(guān)鍵
在運(yùn)動(dòng)控制中,精度(Accuracy)也稱絕對(duì)精度,是指在特定維度下到達(dá)指令位置的準(zhǔn)確性。通常需要測(cè)量全行程內(nèi)多點(diǎn)的誤差,統(tǒng)計(jì)上使用P-V、P-P或3σ統(tǒng)計(jì)方式作為考量。
01、絕對(duì)精度和重復(fù)精度
提高絕對(duì)精度是一項(xiàng)十分困難且成本高昂的工作,但提高重復(fù)定位精度,并在控制器層面進(jìn)行合理應(yīng)用,是一種高效且常見的方法。
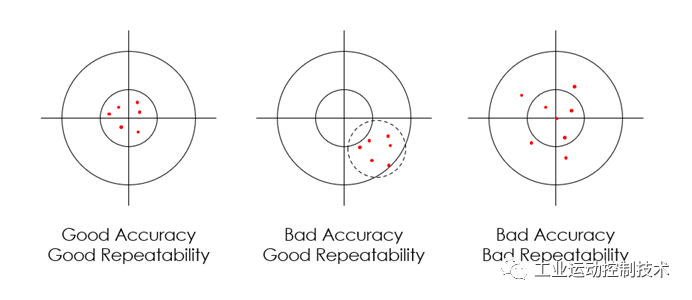
絕對(duì)精度和重復(fù)精度
二維精度通常指運(yùn)動(dòng)平臺(tái)在X軸和Y軸兩個(gè)坐標(biāo)系中的準(zhǔn)確性和穩(wěn)定性。它取決于運(yùn)動(dòng)平臺(tái)自身的機(jī)械性能、反饋系統(tǒng)和驅(qū)動(dòng)系統(tǒng)。要測(cè)量二維絕對(duì)精度數(shù)據(jù),需要使用更可靠的二維量測(cè)方法。盡管驅(qū)控系統(tǒng)可以提供直觀的二維反饋數(shù)據(jù),但反饋數(shù)據(jù)和精度是兩個(gè)不同的概念。
下圖用X和Y坐標(biāo)軸的偏差來(lái)表示二維精度:
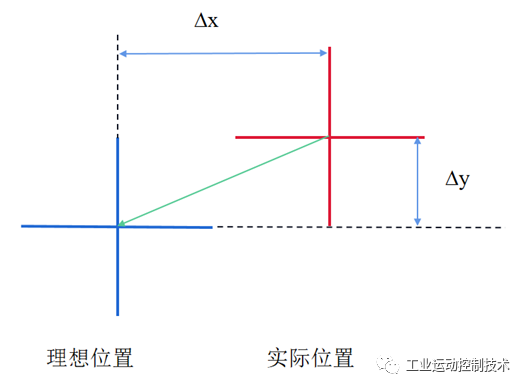
二維誤差
02、二維誤差的來(lái)源
組成X軸和Y軸各自定位誤差(重復(fù)定位精度)是二維精度最容易理解的來(lái)源。然而,二維精度的產(chǎn)生遠(yuǎn)大于此。X軸和Y軸的垂直性對(duì)二維誤差的大小上起著至關(guān)重要的作用;同時(shí),X軸和Y軸的直線度也會(huì)影響到垂直軸的定位精度;每個(gè)軸的偏擺、俯仰、翻滾誤差不僅影響定位,還會(huì)帶來(lái)阿貝誤差,進(jìn)而影響最終的定位精度。為了簡(jiǎn)化從兩個(gè)一維軸性能到二維誤差的推導(dǎo)過(guò)程,我們需要應(yīng)用困難的理論公式。
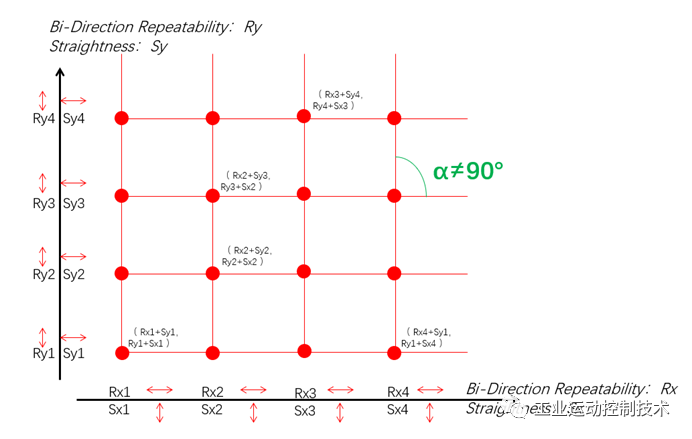
二維誤差部分來(lái)源分析
若要實(shí)現(xiàn)良好的定位,一種方式是采用精度更高的位置反饋進(jìn)行位置閉環(huán)運(yùn)算,但這種方式成本高且難度極大;另一種相對(duì)經(jīng)濟(jì)可行的方式是使用精確的測(cè)量方法來(lái)測(cè)試可重復(fù)的二維誤差,并在運(yùn)動(dòng)控制器中進(jìn)行實(shí)時(shí)位置補(bǔ)償。
03、二維補(bǔ)償
二維補(bǔ)償?shù)尿?qū)控方案,運(yùn)動(dòng)控制器的二維補(bǔ)償方案得到了實(shí)際驗(yàn)證。
第二代補(bǔ)償方式操作簡(jiǎn)便、穩(wěn)定可靠,并且通過(guò)一次差值的方式在中間位置基本滿足了大多數(shù)二維補(bǔ)償?shù)膽?yīng)用需求。
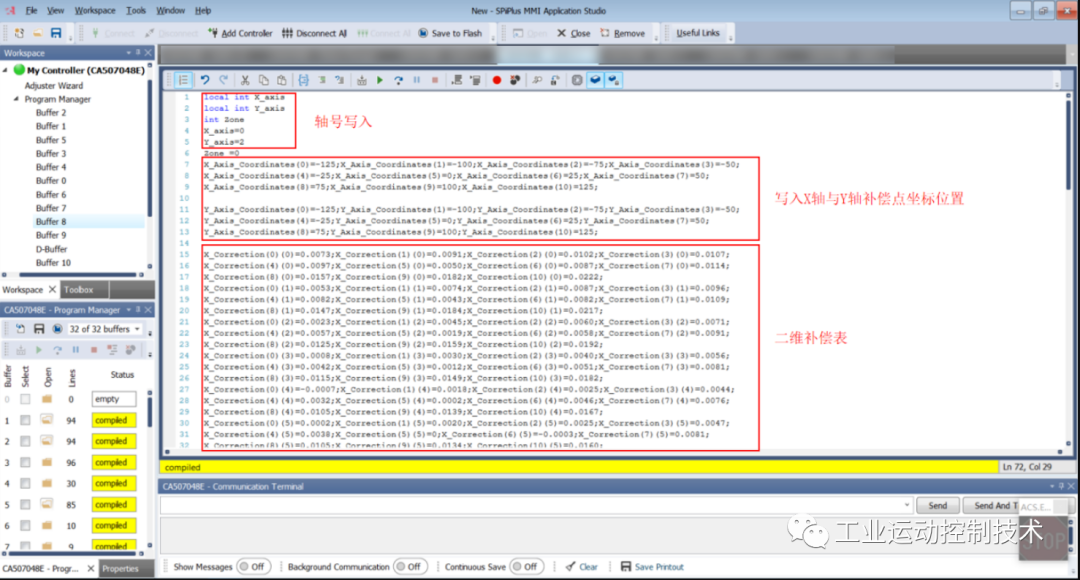
二維補(bǔ)償程序前段
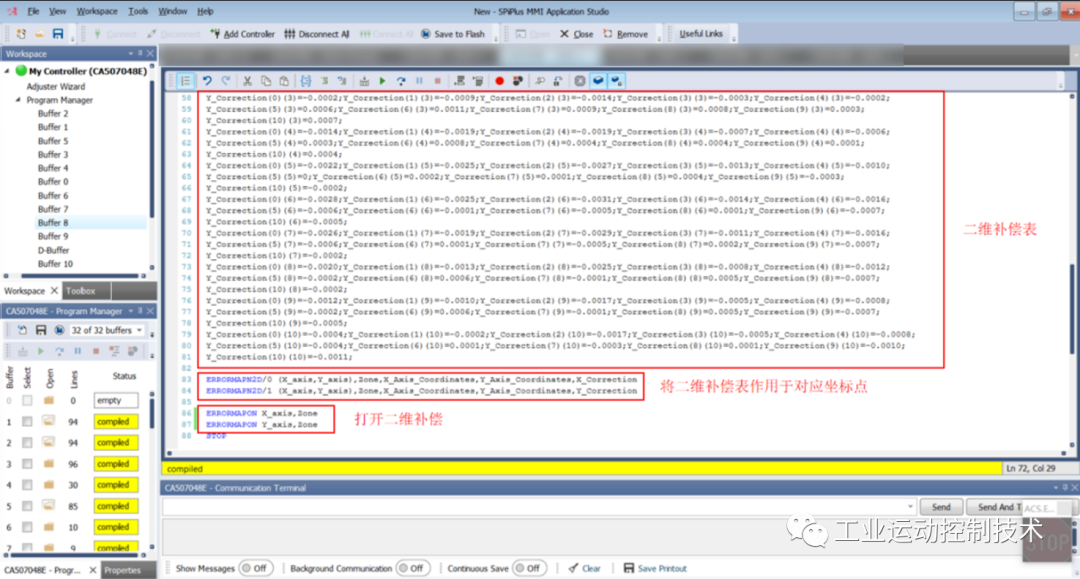
二維補(bǔ)償程序后段
04、二維誤差標(biāo)定
對(duì)于二維誤差的標(biāo)定,核心是使用二維精度更高的反饋或樣品進(jìn)行坐標(biāo)標(biāo)定。使用二維編碼器反饋是一種成本相對(duì)較高的方案,其核心是高精度的二維光柵,且大面型的反饋也很難找到。除了機(jī)床應(yīng)用外,HEIDEHAIN提供的KGM平面光柵系統(tǒng)也可用于精密平臺(tái)誤差標(biāo)定。
平面光柵
另外,通過(guò)使用其他高精度標(biāo)定板并結(jié)合相機(jī),也可以實(shí)現(xiàn)誤差值的標(biāo)定。根據(jù)標(biāo)定點(diǎn)數(shù)量不同,標(biāo)定出二維點(diǎn)陣的位置誤差,并寫入補(bǔ)償表中,從而實(shí)現(xiàn)動(dòng)態(tài)補(bǔ)償。
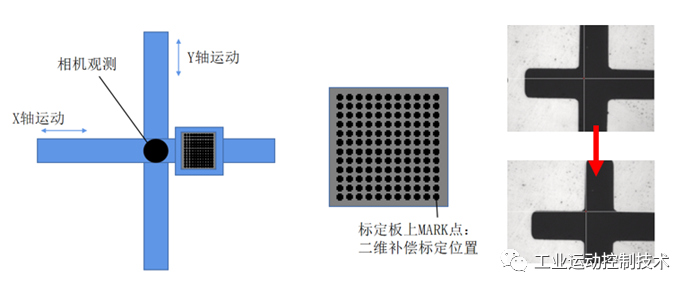
標(biāo)定板標(biāo)定二維精度
-
定位
+關(guān)注
關(guān)注
5文章
1329瀏覽量
35357 -
運(yùn)動(dòng)控制
+關(guān)注
關(guān)注
4文章
579瀏覽量
32855 -
精度
+關(guān)注
關(guān)注
0文章
258瀏覽量
20016
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
微軟與FIDO利用AI技術(shù)精準(zhǔn)定位漏水點(diǎn)
精準(zhǔn)定位,深度清潔:揭秘工廠清潔機(jī)器人的核心技術(shù)
如何實(shí)現(xiàn)室內(nèi)精準(zhǔn)定位?分享室內(nèi)精準(zhǔn)定位技術(shù)及方法

單北斗精準(zhǔn)定位,頂堅(jiān)北斗有源終端賦能行業(yè)新應(yīng)用!

UTB定位技術(shù)能不能精準(zhǔn)定位
如何為柜式終端設(shè)備選配(集成)二維碼模塊?

室內(nèi)精準(zhǔn)定位都有哪些亮眼的優(yōu)勢(shì)?
室內(nèi)精準(zhǔn)定位的應(yīng)用范圍?室內(nèi)精準(zhǔn)定位的方式有哪些
室內(nèi)精準(zhǔn)定位是什么?室內(nèi)精準(zhǔn)定位的方式有哪些?
車載車庫(kù)GPS信號(hào)探測(cè)器:精準(zhǔn)定位,智能導(dǎo)航
技術(shù)|二維PDOA平面定位方案

北三短報(bào)文終端+精準(zhǔn)定位終端,打造高效應(yīng)急救援體系
手機(jī)顯示屏二維碼讀取,產(chǎn)品視覺定位,外觀檢測(cè)應(yīng)用軟硬件配置方案
GPS信號(hào)屏蔽器:精準(zhǔn)定位與隱私保護(hù)的平衡點(diǎn)
博揚(yáng)智能具有精準(zhǔn)定位的二相步進(jìn)電機(jī),控制方式與連接方式對(duì)比






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論